纸基石墨烯复合膜的制备及其智能变形研究
2020-09-03 07:52齐珂,胡颖
合肥工业大学学报(自然科学版) 2020年8期
齐 珂, 胡 颖
(合肥工业大学 工业与装备技术研究院,安徽 合肥 230009)
0 引 言
柔性智能驱动器能将光[1-2]、电[3-4]、热[5]、湿度[6-7]等外部刺激直接转化为器件本身的机械变形,因而在软体机器人、人工肌肉、柔性智能机械等领域具有重要的应用前景。在众多的外部刺激能量中,以光作为刺激源的光驱动器具有远程操控、无线驱动、无接触等优点,从而成为了科学家们所关注的热点,基于不同材料不同结构的光驱动器也进行了大量的研究。文献[8]提出了一种新型近红外光响应驱动器,该驱动器采用聚丙烯酸钠/氧化石墨烯为材料,通过湿纺法制备具有良好近红外光响应的纤维制动,实现了驱动器的扭转变形。文献[9]开发了一种基于液晶网络的可见光响应软致动器,使用可见光聚合的邻氟偶氮苯(F偶氮)作为结合到向列型聚合物网络中的光响应部分,当暴露于太阳光下,该薄膜显示出独特的混乱自振荡。
然而,以上研究均是对单一刺激源响应,这会限制驱动器在某些特定领域的使用,不利于驱动器的进一步发展。针对上述问题,最近有些学者提出了发展具有多刺激源响应的柔性驱动器,文献[10]提出了基于氧化石墨烯和双轴取向聚丙烯复合材料的多响应致动器,该驱动器对近红外光和湿度均具有良好的响应特性,可制备成扭转结构;文献[11]制备了具有内部气囊微结构的蓬松石墨烯和商业聚酰亚胺胶带组成的双层致动器。该致动器可以产生大的变形、高输出力和双刺激响应,但发展制备工艺简单、变形性能优异的多刺激源响应驱动器仍然是柔性驱动器领域的关键与挑战。
石墨烯是一种具有二维纳米结构的碳材料,具有优异的光学、电学、热学及力学特性,在复合结构材料、柔性电子器件、能源器件、柔性触摸屏[12-14]等领域具有巨大的使用价值。在柔性驱动领域,石墨烯同样被广泛使用,文献[15]将石墨烯作为导电材料制备了具有三维结构的柔性驱动器,该驱动器在输入低电压时可产生大应变及输出力,并具有良好的耐久性,从而在人造肌肉领域展示了良好的应用前景;文献[16]将石墨烯与生物蛋白相结合,制备了具有光响应的水凝胶柔性驱动器,该驱动器可对红外光刺激产生快速响应,进一步通过结构设计,该柔性驱动器还可以实现爬行、弯曲等运动。石墨烯也可以作为光吸收剂,将光能转化为热能,从而刺激热响应材料,实现智能变形[11]。以上研究成果证明了石墨烯作为柔性驱动器材料组分的良好潜力。
纸张是由亲水性纤维素纤维有序排列而组成的多孔结构材料,具有低成本、韧性好、可生物降解等众多优势,因此在微流体、柔性印刷电子、低成本生物医学检测、可穿戴传感和折纸机器人等领域得到了广泛研究[17-20]。目前,基于纸张为材料的致动器,显示出了良好的变形能力[21-23]。因此,本文开发了一种具有光/湿度双刺激源响应的智能薄膜驱动器。该驱动器由具有良好韧性的纸基石墨烯膜和聚丙烯薄膜组成。利用石墨烯光热转换特性、纸张的吸湿膨胀特性、聚丙烯薄膜的热膨胀特性,实现了该薄膜驱动器在外部光照刺激下的快速弯曲大变形。通过利用纸张中的纤维排列的各向异性,进一步调控该驱动器的光致变形幅度。
此外,该驱动器也能对湿度变化进行响应。在环境湿度的变化为10%时,驱动器可产生弯曲角度为41°的弯曲变形。这是由于纸张中纤维素纤维对于环境水分子的吸附以及解吸附从而导致纸张的膨胀或收缩而造成的。该智能驱动器具有双刺激源响应特性,其制备方法也相对较简单,从而有望在折纸机器人、智能机械、微流控、柔性传感器等应用领域发挥作用。
1 驱动器制备及表征
1.1 纸基石墨烯复合薄膜的制备过程
本实验中使用的氧化石墨烯溶液购于南京先丰纳米材料科技有限公司,氧化石墨烯纳米片的片径尺寸大于0.5 μm。采用的纸为普通A4打印纸。
纸基石墨烯膜的制备过程如下。
(1) 超声准备。将购买的氧化石墨烯溶液(1 mg/mL)放入超声仪器中超20 min(功率100 W),使溶液中的氧化石墨烯纳米片均匀分散。
(2) 将普通A4纸裁剪成相应尺寸(尺寸为25 mm×75 mm),后浸渍在装有40 mL的氧化石墨烯溶液的培养皿中,每次浸渍5 min。首次浸渍后,将浸渍后的氧化石墨烯纸放置在玻璃基板加热平台上用40 ℃烘干1 h。
(3) 烘干后的氧化石墨烯纸被重复浸渍,在后序烘干过程中始终保持氧化石墨烯纸与玻璃基板接触面为同一侧,浸渍20次后得到纸基氧化石墨烯膜。
(4) 将纸基氧化石墨烯膜通过氢碘酸还原1.5 h,随后用乙醇与水进行依次洗涤后,放置在加热平台上40 ℃烘干0.5 h,得到纸基石墨烯复合薄膜。其制备流程如图1所示。
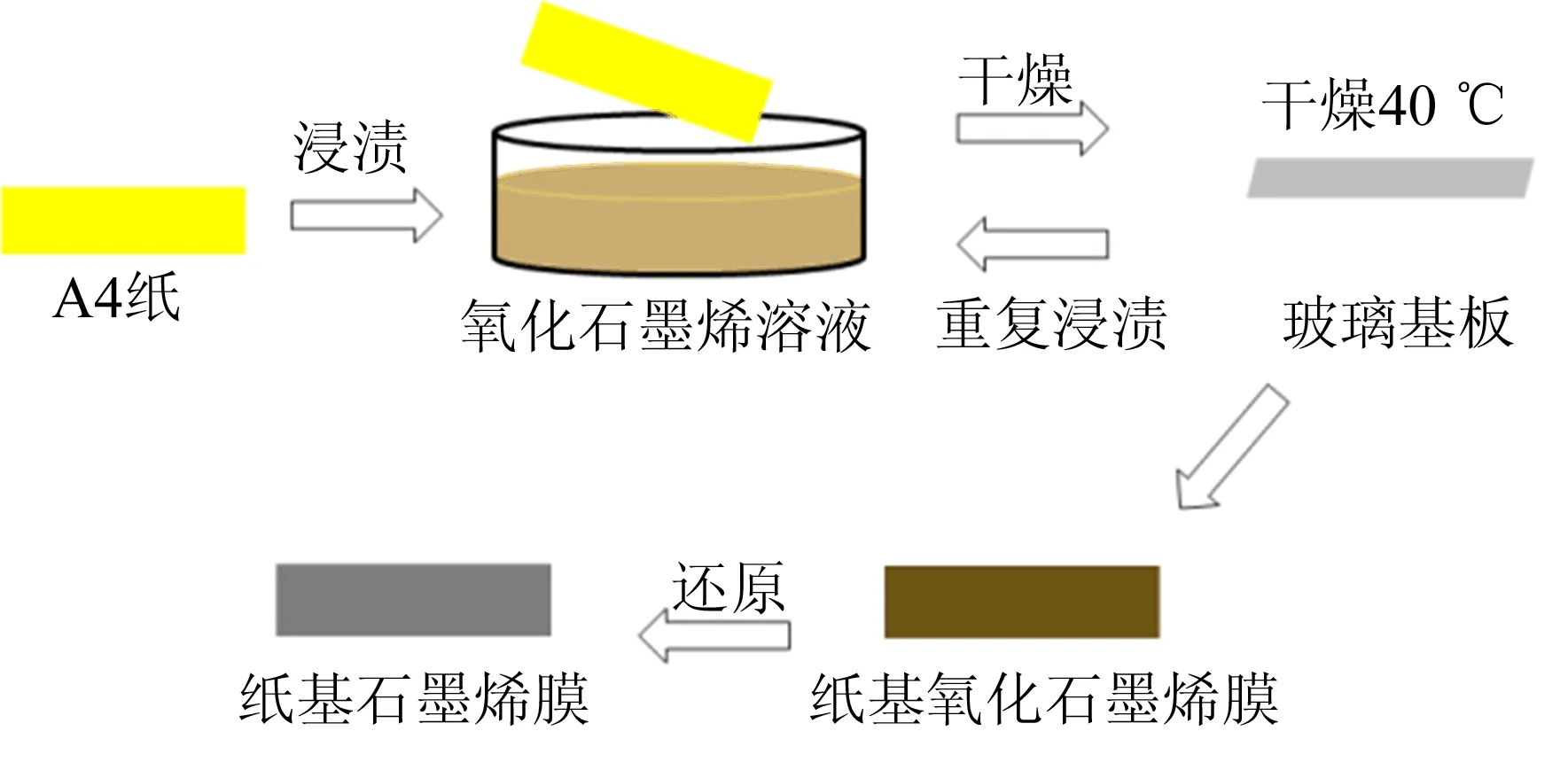
图1 纸基石墨烯膜的制备过程
1.2 纸基石墨烯薄膜的表征
所采用打印纸、纸基氧化石墨稀膜和纸基石墨稀膜的扫描电子显微镜(scanning elecron microscope,SEM)图如图2所示。
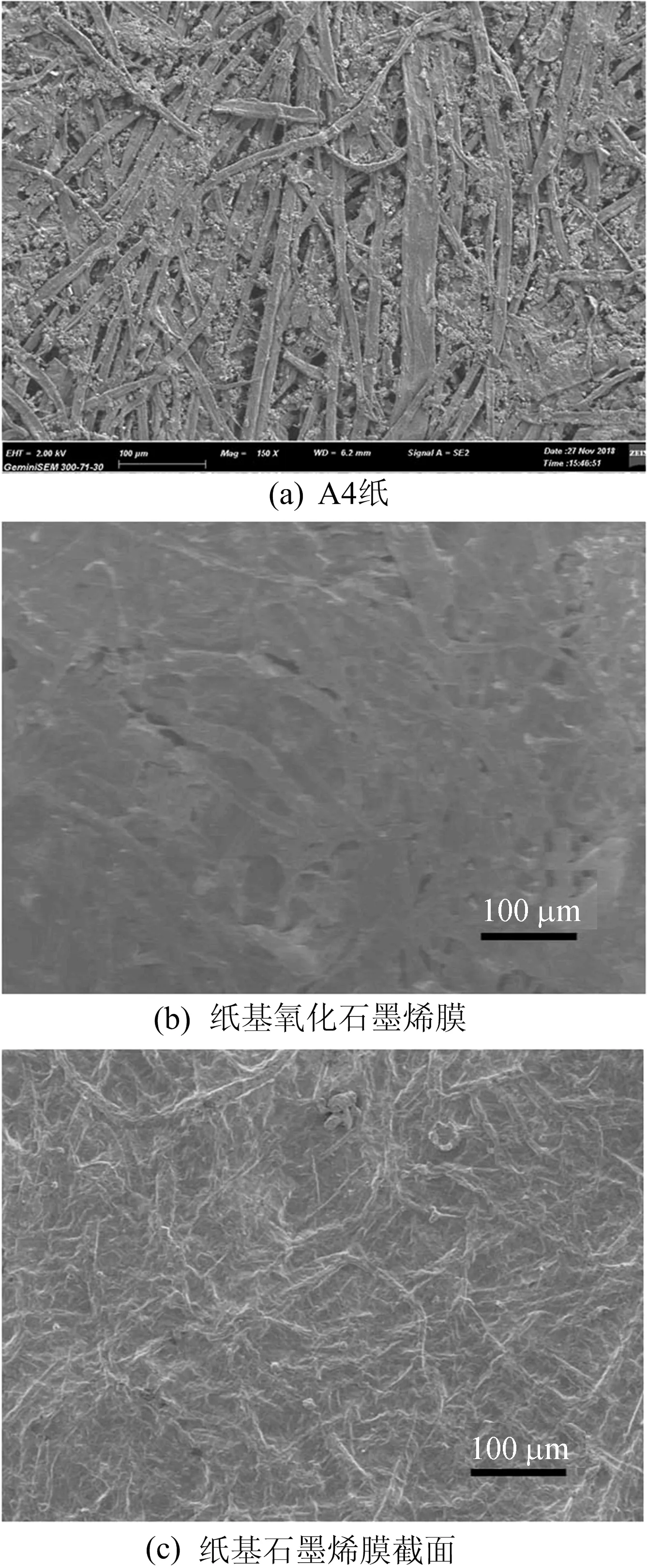
图2 纸基石墨烯薄膜表征
图2a显示纤维素纤维的各向异性结构,其表面良好的孔状结构,有利于氧化石墨烯纳米片在其表面上进行附着,同时也有利于水分子在其中的吸附与解吸附。
由图2b可知,氧化石墨烯纳米片在纸张表面上进行良好的附着及成膜。从图2c可以看出,大量的石墨烯附着在纸基纤维的表面,形成石墨烯连续薄膜,且石墨烯与纤维素纤维之间的附着良好,无明显的脱落现象。
纸基石墨烯薄膜表面的拉曼光谱如图3所示,从图3可以看出,D峰(1 350 cm-1)和G峰(1 591 cm-1)表明复合膜表面存在石墨烯。

图3 纸基石墨烯膜表面微拉曼光谱
1.3 驱动器的制备
将制备好的纸基石墨烯膜与聚丙烯薄膜进行粘合,得到纸基石墨烯聚合物双层复合薄膜驱动器,其制备过程如图4所示。

图4 纸基石墨烯薄膜的制备过程及驱动原理
该驱动器制备过程简单、快速、适合规模化制备。将该复合薄膜裁剪成长条状,将其一端夹持固定,另一端悬空可自由变形。
2 实验结果分析
2.1 驱动器驱动机理
纸主要由多孔亲水性纤维素纤维网络组成,由于水分子从环境湿度的吸收/解吸而具有吸湿膨胀性质。当放置于热刺激下,由于热诱导的水分子解吸,纸在热刺激下会产生体积收缩。而聚丙烯薄膜具有大的热膨胀系数,在热刺激下可产生大的膨胀,并且具有良好的光透过性。因此当纸基石墨烯聚合物双层复合薄膜驱动器在受到光刺激时,纸基石墨烯膜快速将光能转换成热能,并对聚丙烯薄膜进行热刺激,导致纸基石墨烯膜的失水收缩和聚丙烯薄膜的受热膨胀。这种非对称的变形导致了纸基石墨烯复合膜向纸基石墨烯一侧弯曲如图4所示。
2.2 各向异性对驱动器光驱动性能的影响
因为纸张内的纤维素纤维具有各向异性的排列特性,所以会对驱动器的性能产生影响。基于此,本文研究了内部纤维排列方向不同的纸基石墨烯复合薄膜驱动器在光照下的变形情况,如图5所示。
本文制备了大面积的长方形纸基石墨烯复合薄膜,并以纸张原始纤维的排列角度作为0°,分别沿0°、45°、90°这3种不同的角度裁剪出尺寸相同(长×宽为40 mm×5 mm)的长方形复合薄膜驱动器。这3张复合薄膜除了内部纤维排列方向不一致以外,其余的各种性能都保持了一致。
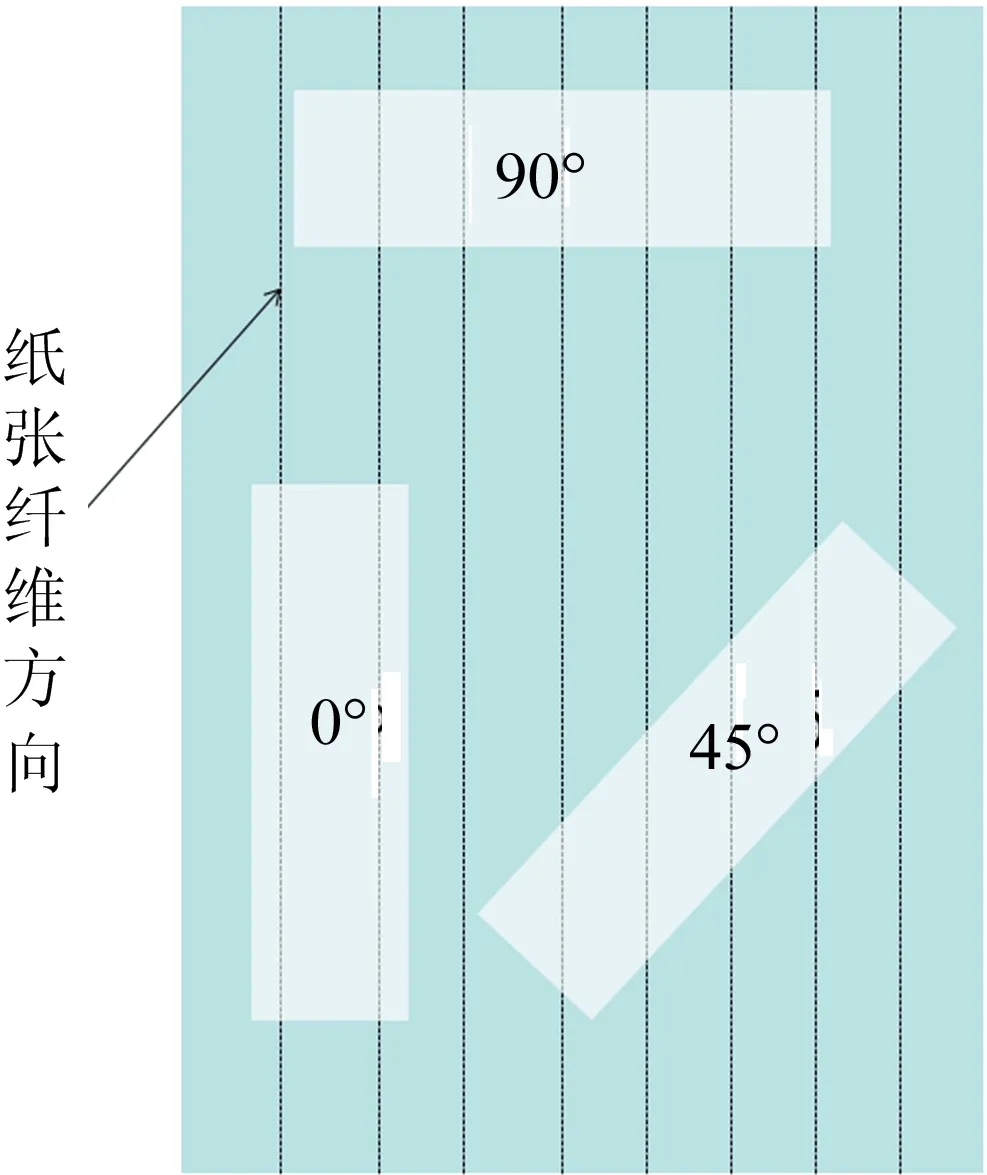
图5 沿纤维排列3个方向裁剪纸基石墨烯薄膜
本文利用驱动器的弯曲变形角度来评价驱动器的驱动性能。当对驱动器进行外部刺激时,通过光学相机对驱动变形过程进行实时测量,从而获得驱动器随时间变化而产生变形的一系列图片,通过PicPick软件对图片中驱动器的角度变化进行测量,获得弯曲角度随时间变化的数据,并通过origin软件对数据进行处理,生成驱动器的弯曲角度-时间变化曲线如图6所示。本文中测试了这3张复合薄膜的光致变形性能,为保证实验变量唯一性,将驱动器都放置于同一光源强度(473 mW/cm2)下进行光照刺激。
从图6可以看出,纤维排列角度不同,复合薄膜光致变形的大小也不相同,随着纸张内纤维排列角度从0°到45°再到90°,复合薄膜的光致变形弯曲角度也相应地从35°提高到了47°以及91°。这表明纤维排列角度能深刻影响复合薄膜的光致变形性能。

图6 在同一光源强度刺激驱动器的时间-弯曲角度变化
本文进一步测量了纤维排列角度不同的驱动器在致动过程中所产生的温度变化,如图7所示。由图7可知,其光照下产生的温度变化曲线基本一致,最高温度均保持在47 ℃左右。由此可知,不同纤维排列方向的复合薄膜驱动器的光致变形性能差异与温度无关,是由纸张纤维排列方向的各向异性导致的。
因此在后续实验中,为了获得大的弯曲变形性能,本文均以与纸张纤维排列方向呈90°(纵向垂直于纤维方向)来裁剪制备驱动器。

图7 在同一光源强度刺激下驱动器的时间-温度变化
纤维排列方向为90°的复合薄膜驱动器在473 mW/cm2光照强度下的实时光致变形如图8所示。
从图8可以看出,该薄膜在光照后能快速弯曲变形,并且在光照撤除后,能恢复到原始形状,证明了该光致变形的良好可逆性。
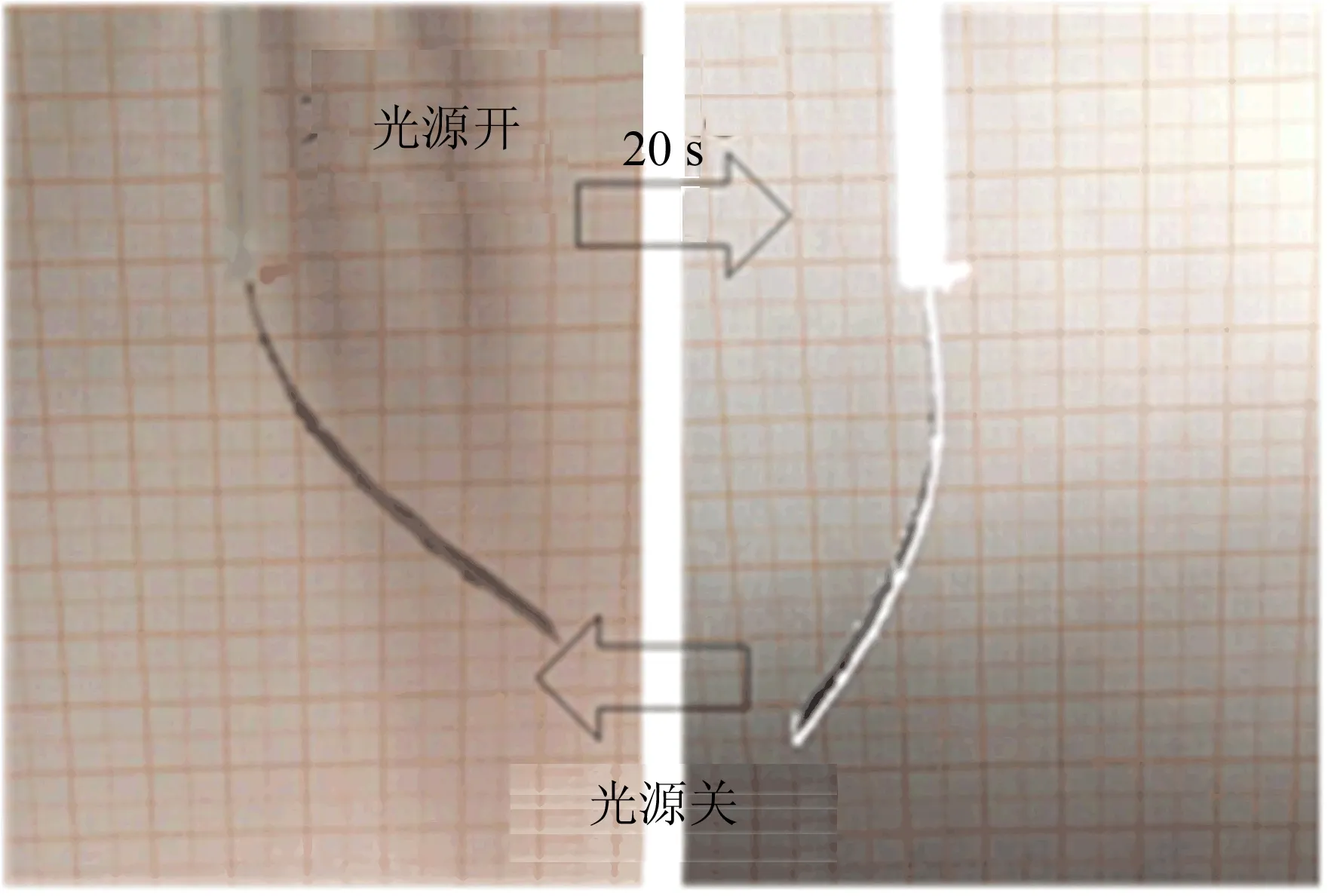
图8 驱动器在473 mW/cm2光照强度下光照20 s的实时变化
2.3 光功率密度对驱动器驱动性能的影响
本文进一步研究光照强度对驱动器驱动性能的影响,所选用的光照强度分别为296、381、473、562、601 mW/cm2。光照强度与驱动器最大弯曲角度、最大温度之间的关系如图9所示。
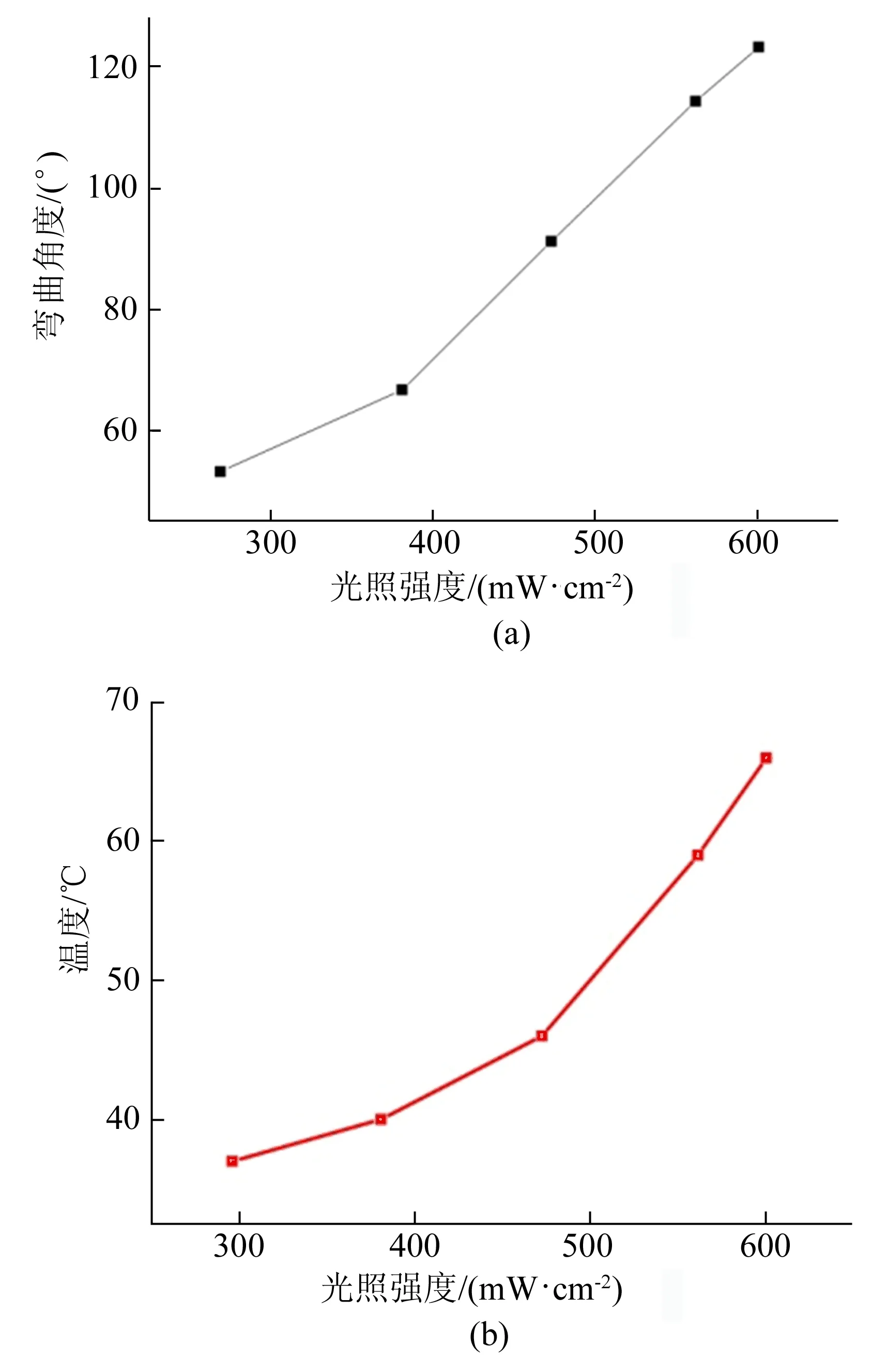
图9 光照强度与最大弯曲角度、最大温度的关系
由图9a可知,随着光照强度的增加,驱动器的最大弯曲角度也相应地增加。
由图9b可知,其温度变化与驱动器弯曲角度的变化是基本一致的。随着光照强度的增加,更多光能通过石墨烯的光热作用被转换成热能,驱动器所产生的温度会越高,导致复合薄膜更大的热响应变形,从而使驱动器的驱动弯曲角度更大。因此可以通过调整光照强度来远程操控驱动器光致变形的大小,从而实现针对不同变形量的使用需求。
2.4 驱动器驱动力测试
为了进一步测量驱动器在光源刺激下驱动力的大小,课题组自行搭建驱动力测试装置如图10所示,当驱动器受到光照刺激时发生向下弯曲形变,驱动器与天平接触并对其施加压力,通过测量天平数据的实时变化,进而测得驱动器在不同光照强度下驱动力。驱动器在不同光照强度下驱动力如图11所示,随着光照强度的增加,驱动力不断增加。

图10 驱动器光刺激响应驱动力测量装置

图11 光照强度与驱动力关系
2.5 驱动器的湿度响应特性
因为纸基石墨烯薄膜具有一定的吸湿膨胀特性,而聚丙烯薄膜对水分子响应呈惰性,所以在受到湿度刺激时,纸基石墨烯薄膜因水分子的进入而发生体积膨胀,聚丙烯薄膜对水分子无明显响应,导致驱动器向聚丙烯薄膜侧弯曲。其湿度刺激的弯曲过程如图12a所示,在纸基石墨烯复合薄膜驱动器上施加湿度刺激后(湿度变化为10%),在45 s的时间内,可以明显地观察到驱动器尖端产生了弯曲变形。而在撤除湿度刺激后,在100 s的时间内,驱动器恢复到了原始的形状。弯曲角度随时间变化的曲线如图12b所示,由图12b可知,驱动器的弯曲角度最大能达到40°。
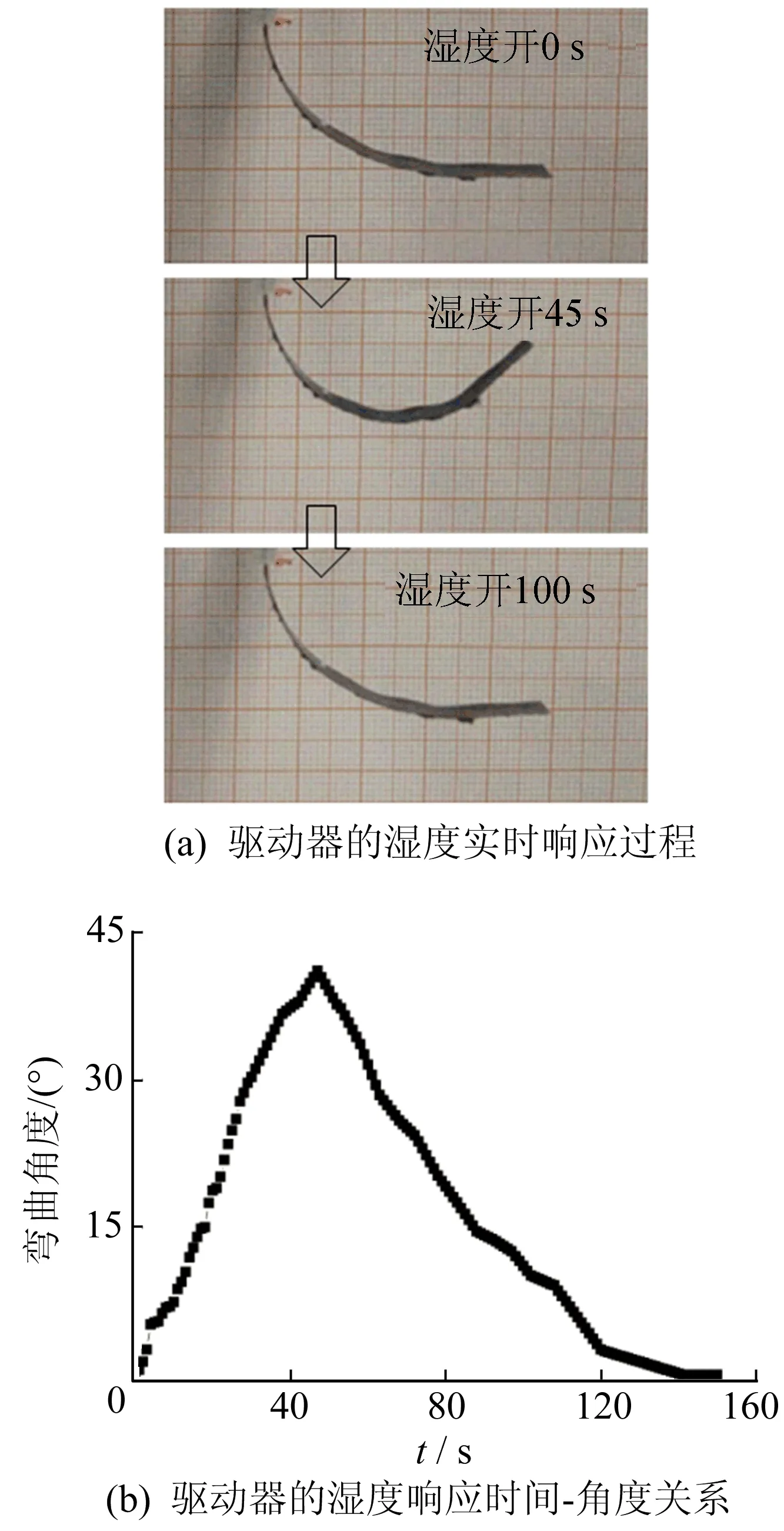
图12 驱动器的湿度响应特性
3 结 论
本文利用具有各向异性的纸基石墨烯膜和具有良好热膨胀系数的聚丙烯薄膜,通过简单的制备工艺制备了具有光响应和湿度响应的多刺激源纸基石墨烯聚合物双层复合薄膜驱动器,并得到以下结论。
(1) 该驱动器具有良好的光响应特性,并且受制备材料纸的各向异性影响,在沿与纤维垂直方向作为长度方向裁剪所制备的驱动器比其他方向具有最大的光响应弯曲角度,在光照强度为473 mW/cm2时,最大弯曲角度可以达到91.26°,驱动器实时温度为47 ℃。随着光源强度的进一步加强,驱动器最大弯曲角度随之增加,当光照强度达到601 mW/cm2,驱动器的最大位移角度达到123.45°。本文进一步测量了在光响应条件下,驱动器的驱动力与光照强度的关系,随着光照强度的增加,驱动器的驱动力随之增加。
(2) 由于纸的吸湿膨胀特性,该驱动器具有良好的湿度响应特性。当湿度变化为10%时,驱动器尖端位移角度能达到40°。
本文将纸、石墨烯、聚丙烯薄膜通过简单的制备方法进行结合,制备了具有多刺激源响应的纸基石墨烯聚合物双层复合薄膜驱动器,测试了其光响应特性和湿度响应特性,进一步分析了各个因素对纸基石墨烯聚合物双层复合薄膜驱动器驱动性能的影响,拓展了柔性驱动器在应用方面的前景。
猜你喜欢
合成树脂及塑料(2022年1期)2023-01-04
陶瓷学报(2021年5期)2021-11-22
中南民族大学学报(自然科学版)(2021年5期)2021-10-22
北华大学学报(自然科学版)(2021年3期)2021-07-13
纺织科技进展(2021年3期)2021-06-09
电脑爱好者(2020年6期)2020-05-26
石油化工应用(2020年2期)2020-01-02
表面工程与再制造(2019年3期)2019-09-18
北京航空航天大学学报(2017年5期)2017-11-23
汽车零部件(2016年6期)2016-07-18