基于无线智能节点的远程控制系统设计与实现
2020-09-15 01:49李明刘若愚姜春兰寇家勋
北京理工大学学报 2020年8期
李明, 刘若愚, 姜春兰, 寇家勋
(北京理工大学 爆炸科学与技术国家重点实验室,北京 100081)
智能弹药的突出优势之一是极大限度地保证我方作战人员安全,这就要求武器使用过程中在敌火力封锁范围外或防区外进行指挥控制,通信传输距离较远. 决策是指挥控制的关键一环,细微的差别可能造成打击效果的巨大差异,系统在此过程中加入智能算法提升打击效果,同时为了避免智能算法应对动态战场环境时由于自身性能可能出现的不足[3],在自主协同的基础上设计人在回路控制模式,保证指挥控制的能力、效率和生存力[4],确保在复杂多变的现代战场环境下实时掌握武器系统状态. 本文以真实战场环境为背景,从网络化弹药研究开发和室外环境使用的需求出发,以无线智能节点、终端指挥软件以及仿真平台软件为基本组成,并通过翻译官节点连通两类网络并增加通信距离,设计了具有良好人机交互性、较强自主性和便于指挥控制的远程控制系统.
1 远程控制系统总体设计
网络化弹药是一种包含多种传感器探测、多节点协同攻击的智能武器,可以采用地面人工布设或空中投放,具有体积小、成本低、打击高效等特点,系统具备自主定位、自动警戒、多模探测、识别及跟踪目标和攻击决策等功能[5]. 其远程控制系统由控制中心、子节点、中心节点(也称主节点)和翻译官节点构成,如图1所示. 网络拓扑结构为多簇中心网络,节点根据网络地位分为翻译官节点、中心节点和子节点,操作人员通过控制中心可以观察节点布设情况和系统工作状态,并在必要时进行控制干预.
2 系统硬件设计
系统硬件主要包含翻译官节点、中心节点和子节点,各节点可以根据组网程序或控制指令加入或退出网络,具备与指挥中心多种终端设备远距离通信的能力.
2.1 中心节点与子节点
基于抗毁性和网络动态重组的要求,中心节点和子节点采用同构设计,硬件组成如图2所示,均由自定位、反馈、信号处理、通信、核心处理和电源6个基本模块构成. 自定位模块包含电子罗盘、GPS和北斗芯片;信号处理模块通过DSP芯片及电路完成对目标信号的A/D转换、滤波、特征提取及目标定向、定距;通信模块具有较高接收灵敏度和抗干扰性能,可在多个频段下工作,实现无线传感器网络下节点间通信;带有休眠模式的低功耗32位ARM处理器是节点的“大脑”,与其他模块相互连接,可处理目标信息、节点位置与状态数据、解析控制指令、运行定位跟踪算法以及攻击决策算法. 节点在室内调试采用插座供电,室外使用时采用锂电池供电[6].
2.2 翻译官节点
该类节点具备两项主要功能:一是连通节点间无线网络和指挥终端TCP/IP两类网络,二是充当中继增加通信距离. 系统至少包含1个翻译官节点,且数量随着指挥中心与布设区域距离的增加而增多. 硬件组成如图3所示,嵌入RF射频芯片的节点间通信模块在无线传感器网络下与中心节点或同
类节点进行数据收发,带有WIFI芯片的远程通信模块用来在TCP/IP协议下与指挥中心终端设备进行信息传输,两个通信模块间通过串口进行数据交换,LCD液晶显示屏显示翻译官节点自身工作状态信息.
3 终端指挥软件设计及关键技术
终端指挥软件和仿真平台软件均采用C#语言进行开发. 通过软件可以验证系统工作流程、观察节点布设区域信息,并且可以实时对节点进行指挥控制,软件功能结构如图4所示.
踝关节是下肢最重要的关节之一,几乎承载着人体的全部重量,后踝对于维持踝关节的稳定性起着重要的作用。但后踝骨折块多大才需行手术固定目前尚无定论,大多数学者推荐当后踝骨折块大小超过胫骨穹窿的25%~33%时需进行内固定治疗[3-4]。作者认为外踝复位后,若后踝骨折块仍存在超过2 mm的移位应行切开复位内固定,以恢复关节面平整,尽量避免创伤性关节炎的发生。
软件运行流程为:在完成初始化设置后加载地理信息,配置接口参数后进行通信,即终端与节点间进行数据传输,终端接收数据后按节点和目标两大类进行解析,在交互界面可以选择自主攻击或人工控制干预. 自主攻击通过终端软件算法模块或中心节点核心处理模块使用改进后的AHP算法生成攻击决策方案,人工控制干预通过发送指令或点击相应按钮完成操作,在完成攻击后全网数据自动更新.
3.1 交互显示技术
人机交互界面的好坏直接影响用户的使用效率[7],在交互模块设计过程中充分考虑操作的便捷性. 主界面采用全屏布局显示地理信息、节点位置、网络连通关系和目标轨迹,并对节点网络状态及目标的变化状态进行文本和语音提示. 主界面顶端为功能菜单,左右两侧的“信息提示区”和“指挥控制区”可隐藏以增大显示面积. 菜单项如图5所示置于交互界面顶端,可以自主选择工作模式、切换地图显示、查看通信和决策环节数据;地理信息显示主要包含布设区域地形、地貌,是现代化武器指挥控制系统的重要组成部分[8],软件在带有位置信息的底图[9]上通过Gmap.NET控件经过二次开发实现任务区域的地理信息显示;为避免在长时间监控与操作过程中遗漏重要信息,开发了文字和语音状态提示模块;节点的网络连通关系以中心节点回传的网络连通表为依据,在对其进行解析后按时间顺序以父子关系对各个节点网络联通状态进行判断,并画出网络关系连接线;节点上方显示网络地位及编号,目标可以显示人员、直升机、装甲车辆等多个种类;当目标位置发生改变时,可实时显示其运动轨迹.
3.2 接口通信技术
终端软件和“翻译官”节点间的通信是人机交互的窗口[10],其信息收发在TCP/IP传输控制协议下以Thread类开启通信专用线程进行. 由于具有传输数据可自定义、数据量小、传输时间短、可以加密等优点,选用Socket通信方式. 通过byte[] buffer开辟用于通信输入输出的缓冲区,终端作为服务端启动网络与翻译官节点建立通信连接. 翻译官节点作为客户端入网后向终端回传在网节点及目标数据,并且可以向中心节点发送自身接收的指挥控制指令. 通信数据用符号进行分隔,以数据类型标志量为解析方法判断依据,终端软件按照相应方法对数据进行解析. 主要控制指令如表1所示,可以对单个节点或全网节点进行指挥控制.
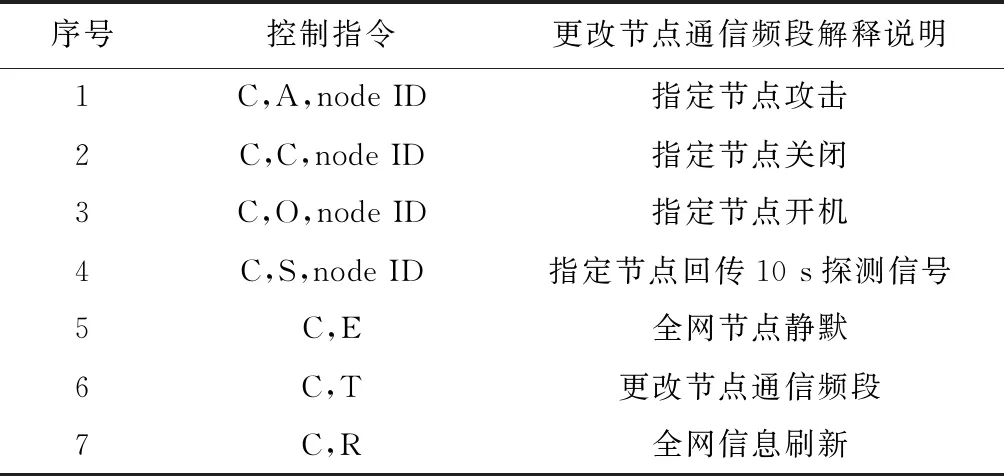
表1 主要控制指令
3.3 决策算法
为了使终端具有决策支持系统(DDS)的功能,即通过数据、模型和知识,以人机交互方式进行决策,且在节点具有智能决策功能的前提下提高抗打击能力,终端通过调用算法具备中心决策的功能. 指挥终端包含算法模块的另一个优点是可以不断改进更新,而弹药节点形成产品后其内置决策算法更新较为困难. 当前采用改进后的AHP层次分析法,AHP是一种多属性智能决策方法[11],核心思想是构建“目标-准则-方案”层次结构,并构造攻击准则判断矩阵,最后对各个决策方案进行排序.
首先建立标准化决策矩阵,设有a个方案、b个属性,M表示方案,x表示属性的数值,则决策矩阵P为
(1)
由于属性指标量纲各不相同,需要进行归一化处理,变换后的矩阵为S=[sij]的元素为
(i=1,2,…,a;j=1,2,…,b)
(2)
对标准化矩阵进行加权,各个属性的权向量为W=[w1w2…wb],可得出加权标准化决策矩阵为
Y=WTS.
(3)
(4)
与负理想解的欧几里得度量为
(5)
则方案与理想解的贴近度为
(6)
采用AHP算法可以将目标距离、目标速度、目标类型、目标角度、节点网络属性和节点自身状态作为关键属性进行判断,网络属性指中心节点或子节点,自身状态主要指电池电量. 以贴近理想解的程度作为判断依据对节点进行排序,排序靠前的节点优先进行攻击. 算法模块采用C语言编写并封装为dll动态链接库,可以减少内存消耗、加快运行速度且C#可以直接调用.
4 仿真平台软件设计
4.1 软件设计
根据弹药工作流程和实际指挥控制数据及指令交互情况进行仿真平台设计,结构如图6. 仿真平台以节点模拟器为依托,与指挥终端软件建立连接,即终端指挥软件启动并监听网络,仿真平台与其进行数据交互,传输战场环境、节点及目标信息. 模拟器界面采用上下布局,“信息发送栏”显示数据信息,“状态显示栏”显示模拟器自身工作情况. 通信传输通过多线程技术以Socket客户端方式模拟真实通信过程,模拟器匹配IP、IPA并经过认证后入网. 仿真任务可以随时修改进程,模拟真实战场上的动态环境. 节点模型、网络模型、目标模型通过使用相应函数生成不同网络结构下的虚拟节点和不同种类的虚拟目标.
4.2 仿真测试
通过仿真平台软件和终端指挥软件,模拟执行封锁野战机场任务. 仿真测试终端运行结果如图7所示,入网9个节点,其中1个中心节点和8个子节点. 对接收到的2个不同种类目标信息进行显示,依据其位置坐标绘制了运动轨迹. 通过终端算法模块计算,9号节点对工程车辆进行了攻击,9号节点及目标车辆显示动态爆炸效果,最后全网进行了状态刷新. 重复多次实验,仿真平台发送数据与终端接收数据一致,终端根据虚拟节点与目标信息可以生成决策方案. 在手动模式下,模拟目标进入节点攻击区域后,手动输入攻击指令,相应攻击节点响应指令对目标进行了攻击.
5 实 验
为了全面检验系统组网、显示、控制和决策性能,在室外进行综合指挥控制实验. 实验设备共有1台笔记本电脑(内存4 GB、酷睿i5双核处理器)、1个翻译官节点、1个中心节点和23个子节点.
5.1 多节点组网控制实验
实验场景如图8所示,节点开启后组网程序启动并开始建立连接;中心节点周期性向“翻译官”节点发送全网信息,指挥终端通过“翻译官”节点获取全网信息后在软件交互界面显示. 终端输入指挥控制指令“C,A,2”,2号节点作出LED闪烁和蜂鸣器启动的响应并回传毁伤信息,交互界面显示爆炸效果.
进行多次实验,完成组网的平均时间为5 s. 实验表明节点组网速度较快,终端能够显示节点位置和网络联通关系并对节点进行指令控制.
5.2 状态刷新实验
状态刷新时间是指当网络节点或目标的状态发生改变时,从中心节点向指挥终端发送更新数据到终端软件完成状态更新显示之间经历的时间. 状态刷新时间是远程控制系统的重要性能指标,对显示节点工况、目标运动轨迹、精确打击和毁伤评估起着关键作用. 系统通常由中心节点汇总全网信息并由翻译官节点向终端进行传输. 实验过程中,节点数量从1~24逐次增加,通过获取节点数据发送时间和终端软件完成解析时间计算状态刷新时间,实验结果如图9所示.
根据实验结果可知,单个节点数据刷新时间为32 ms,8个节点时为132 ms,16个节点时为187 ms,24个节点时为250 ms. 实验表明状态刷新时间随着节点数量增加而增加,且刷新时间较快. 通常情况下,只有个别节点状态发生改变,即便在24个节点均需状态刷新的极端情况下,时间仍可控制在250 ms内,能够满足系统4 Hz的响应要求.
5.3 决策算法性能对比实验
在指挥终端辅助决策和节点自主决策两种模式下,PC端与节点ARM芯片均采用AHP算法,以目标位置、速度、种类以及节点种类、分布疏密程度、电池电量等属性为判断依据,中心节点对目标信息进行预设,节点数目从1依次增加到24,多次测量取均值计算单独攻击决策和加入轨迹跟踪时决策方案生成时间,实验结果如图10所示.
根据实验结果可知,节点数为3时终端决策时间为21 ms、节点决策时间为35 ms;节点数为8时终端决策时间为35 ms、节点决策时间为132 ms;节点数为24时终端决策时间为112 ms、节点决策时间为400 ms;加入轨迹跟踪的情况下,节点数为3时决策生成时间分别为41,182 ms,节点数为8时决策生成时间分别为135,623 ms,节点数为24时决策生成时间分别为799,1 364 ms. 实验表明终端与节点两种决策模式下,随着节点数量的增多运算时间均有所增加,终端决策在运算速度上要明显优于节点决策. 此外,软件的决策算法模块相比产品定型后的智能节点优化改进更为方便.
上述实验结果表明远程控制系统可以依据网络化弹药作战过程,在不确定条件下考虑多个要素进行自主攻击决策,且系统响应时间较短、运算速度较快,能够在复杂多变的战场环境中起到辅助决策的作用.
6 结 论
本文设计了包含翻译官节点、中心节点和子节点以及仿真平台软件、终端指挥软件在内的远程控制系统. 实现了作战仿真、无线智能节点组网,对节点进行指挥控制和终端辅助决策. 提出了无线传感器网络和TCP/IP网络下的“人在回路”指挥控制方式,有效解决了入网弹药无法动态回传战场信息和“人在回路”主动控制困难的问题,可以为网络化弹药研究开发和实际使用提供支持.
猜你喜欢
小猕猴智力画刊(2022年9期)2022-11-04
北京航空航天大学学报(2021年9期)2021-11-02
计算机应用与软件(2021年10期)2021-10-15
纺织科学研究(2021年9期)2021-10-14
现代装饰(2020年8期)2020-08-24
小型微型计算机系统(2020年5期)2020-05-14
计算机与生活(2020年5期)2020-05-13
火力与指挥控制(2020年1期)2020-03-27
决策(2018年8期)2018-12-10
决策(2018年11期)2018-11-28