能力风暴机器人的全局路径规划
2020-09-29 09:04钟丽菲
湖南科技学院学报 2020年3期
钟丽菲
(湖南科技学院 实验实训中心,湖南 永州 425199)
能力风暴机器人由碰撞传感器、红外传感器、光敏传感器、光电编码器等一系列传感器以及一些其他的硬件构成,其外貌如圆盘,底盘装有两个行进的主动轮和两个变换方向的导向轮[1]。对机器人进行编程,机器人能够完成设计者设计的一系列任务。在操控能力风暴机器人完成既定任务的过程中,设计者的编程能力、动手能力、思考能力都能得到一定的提高。在对能力风暴机器人进行实际操控时,由于机器人内部精度不高以及外界一些其他因素的影响,有可能会导致机器人的应用以及开发过程会遭遇一定的阻碍,会遇到技术上的问题[2],在本文中,针对这些有可能遇到的技术问题,制定出了行之有效的相关建议,且将其整理成了以下的方案。
1 机器人的路线规划
所有复杂的路线都是由基本的线路组合而成的,所有机器人想要完成一些复杂的动作,首先需要机器人熟练地走出一些基本的线路。在实际操作过程中,机器人走出的路线和既定的路线是会产生偏离的,机器人路线的执行不一定如预期那样完美,可能会出现向左或者向右的偏离[3-4]。因此,在现实的应用中,需要修正机器人内部左右电机的参数,在进行修正之前,还需要做两个准备工作,第一,检查试验场地是否平直,如果实验场地较为粗糙,即使改变了电机的参数,机器人的电机阻尼系数同样会因为地面的变化而变化,导致机器人偏离预定的路径[5]。因此,首先需要让机器人在实验场地上直线行进一段距离,然后测量机器人的偏移位移。第二,因为能力风暴机器人内部的电机想要正常工作,必须有一个较为稳定的输入电压,而且输入电压的持续时间较为长久,解决此问题的有效方法是,在能力风暴机器人进行表演之前,用全新的、电力十足的电源来替代旧电源。
1.1 机器人走直线的实现
想要机器人的直线行进和预定的直线规划不会出现偏差,先要设置好左右电机的功率参数,让电机在直线前行时不至于出现太大的位移偏移。机器人有左右两个电机,先将其中一个电机的功率参数确定且固定,然后慢慢调节剩下电机的输入功率,让机器人沿直线方向行进3 m,测出机器人直线偏移的距离。为了减少偶然性,保障测量的直线偏移客观真实,需要重复进行功率参数的设置试验。从多次试验内,选择直线偏移距离最小的一组参数作为左右电机的功率参数,并通过参数的数理分析来确定左右电机的输入功率。因为在实际过程中,会存在很多其他的干扰因素,如地面不平,干扰太强等等,因此机器人在直线行进的过程中依旧需要补偿,补偿的方法主要有以左右电机功率的比值为标准进行补偿和以左右电机功率的差值为标准进行补偿等两种方法[6]。
1.2 机器人走圆形的实现
如果能力风暴机器人能够进行曲线移动甚至是圆形移动,那么机器人的行走路线就会变得灵活自由许多。想要实现能力风暴机器人走圆形的功能,第一,和走直线一样,需要确定左右电机的输入功率;第二,调节并确定电机的运转时间,运转的时长是机器人转一圈回到圆的起点的时长。具体的操作方法是,先确定圆直径的大小,然后根据经验粗略评估左右电机的功率参数,让机器人能够大致循着圆的方向和路径行进,接着记录机器人从出发点再回到出发点所花费的时间,这个时间就是电机的运转时间,需要提到的是圆形路线的实现也需要对左右电机的功率进行补偿[7]。
2 避让的实现
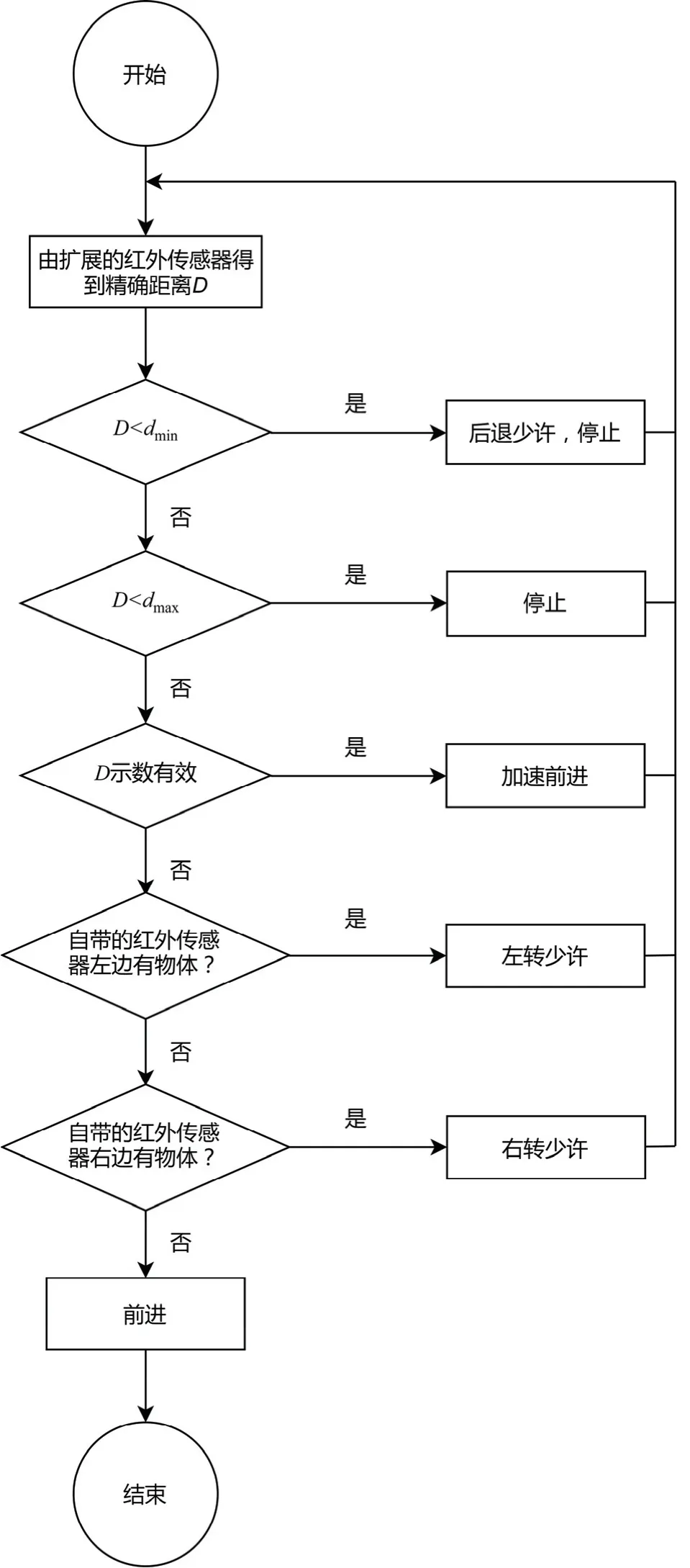
设计者能够通过进程控制或者是顺序的程序流程控制来实现机器人在行进过程中的避让。为了方便检测和矫正程序的错误,本文选用顺序的程序流程控制。其控制原理是遵循碰撞传感器以及红外传感器的先后顺序,扫描它们的端口,针对传感器前方、右侧方、左侧方出现的不同情况进行差异化的处理,整个程序判断的流程图如图1 所示。

图1 实现避让的流程图
3 寻光源的实现
实现避让以后,利用光敏传感器可以让能力风暴机器人在黑暗中绕过障碍,实现其自动寻找光源的功能[8]。功能实现的原理是利用左、右光敏传感器来感应光的强度,假使左边光敏感应器感应到了光,那么机器人就向左边转动,转动的角度不宜太大,少许就行,假使右边光敏感应器感应到了光,机器人就向右转动少许角度,一直重复此程序步骤,直到左边感应器和右边感应器达到相对的平衡,再切换成直线行进。需要提到的是,在阴影中寻找光源需要解决以下问题。
第一,能力风暴机器人一旦踏入阴影区域,有概率会出现原地旋转的情况。想要解决这个问题,可以参考图2 的行进路线规划,一般来说,如果阴影区域的占地面积不是特别大,机器人的光敏感应器能够在行进路线中的某个点上感应到光强,继而走向光源。

图2 走出阴影的路线规划
第二,如果光源的强度变化较大,强度较高,当能力风暴机器人左右两端的光敏传感器频繁感应到光源时,机器人可能会在左右两端频繁变向,持续摇摆。想要解决这个问题,最优的方法就是界定机器人的感应范围和强度,给其1 个判决的裕量,如果光敏传感器感应到的光强界于确定的裕量范围内,机器人就正常前行[9]。裕量的得出具体如下,假使左端光敏传感器感应到的光强为IL,右端光敏传感器感应到的光强为IR。
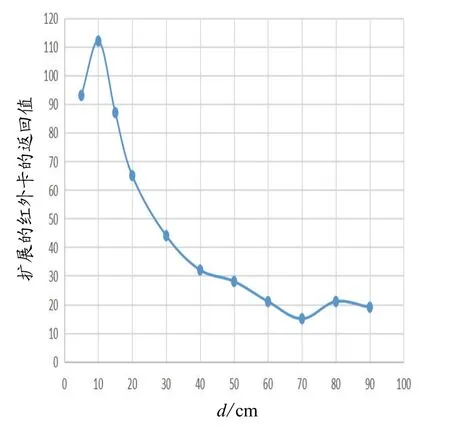
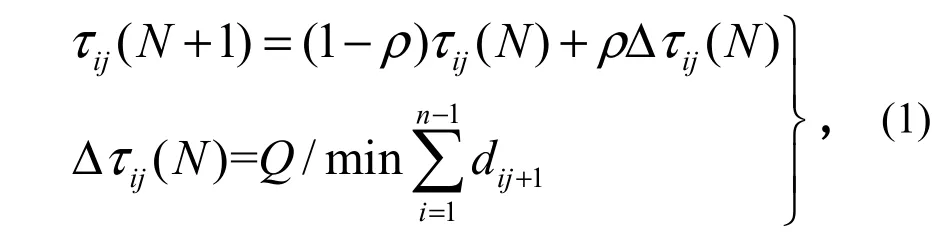
如果存在v。当IL>IR+v 时,改变运行模式,向左转少许;当IL 想要实现后面机器人跟踪前面机器人的功能,需要在后面的机器人身上新增一块扩展的红外卡。扩展的红外卡在接收反射红外线的强度以后,能够根据这个强度输出一个值,这个值是0~255 内的某个值。因为红外卡输入与红外卡输出之间的关系较为复杂,两者并不呈线性关系,因此想要让扩展的红外卡正常地进行工作,一定要先了解红外卡输出值和实际距离之间的特性。两者的特性能够通过实际的测量得出,得出相关的数据以后,将实际距离和红外卡读出值之间的关系用函数曲线来表示,具体如表1 和图3 所示。 表1 红外扩展卡性能数据实测表[10] 图3 扩展的红外卡的性能曲线 通过对图3 的曲线分析,我们能够知道,红外卡的读出值与红外卡和障碍物相隔的距离长短有关系,但两者并不呈线性变化,为了方便操作,在实际案例中,普遍将障碍物的距离维持在离机器人15 cm~60 cm 的范围内。 能力风暴机器人自带的红外传感器只能粗略地判断前方有无障碍物,无法判断障碍物所处的具体方向和位置,精度不高。扩展的红外传感器能够对障碍物进行精准的定位,所以应该先检查扩展的红外传感器,如果它感应到了物体,就能说明障碍物位于机器人的正前方,然后根据障碍物的位置以及距离机器人的远近,做出下一步的行进决策,让机器人和被跟踪的物体的距离维持在扩展的红外卡的线性区内。如果扩展的红外传感器没有检测到障碍物,就启动自带的红外传感器。如果依旧检测不到障碍物,就说明目标跟丢,需要加大搜索范围,跟踪流程的算法实现如图4 所示,其中dmax为扩展的红外卡感应线性区间的最大距离,dmin为扩展的红外卡感应线性区间的最小距离。 图4 跟踪的算法实现 研究发现,自然界中的蚂蚁没有视觉但是总能找到一条从食物到巢穴的最优路径。本文借鉴蚁群算法,设计了基于蚁群算法的全局路径规划。在算法的初始阶段,需要给每条路径定义一个初始信息素浓度,通常设定一个大于零的常量,也可以进行启发式设计,并且设定上下限;在之后不断迭代的过程中,通过设计信息素的更新方式和规则,给与每一路段不同的信息素权重;最后为了更加贴合实际,每次迭代完成后,对整条路段上的信息素进行再次更新,然后根据实际工程需求设计更新规则[11]。 全局更新规则为 通过这个规则的设计和实现,蚁群算法在指定的迭代次数内,可以完全遍历n 个节点,寻找到最佳路径。 用MATLAB 随机生成一种20×20 的二维地形图矩阵,利用改进蚁群算法进行仿真,仿真参数为:n=100,ρ=0.3,Q=1。仿真结果如图5 所示。 图5 全局路径规划结果 从图5 中可以看出,在简单的二维障碍物环境中,使用本文的方法和改进算法可以在有限迭代次数内寻找到最短路径。 根据能力风暴机器人实际行进路线过程中可能遇到的困难,本文提出基于蚁群算法的全局路径规划,机器人能自动实现行进路线的全局规划,具体措施包括路线规划、避让、寻光、跟踪等。机器人路径规划研究作为一个热点研究方向,本文的实现方法具有重要的参考价值。4 跟踪的实现

5 基于蚁群算法的全局路径规划
6 全局路径规划仿真

7 结 语
猜你喜欢
中国饲料(2022年5期)2022-04-26
湖南科技学院学报(2021年3期)2021-10-21
建材发展导向(2021年13期)2021-07-28
炎黄地理(2021年12期)2021-01-04
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
智慧少年·故事叮当(2018年12期)2018-05-14
散文诗(2017年12期)2017-08-23
创新作文(5-6年级)(2016年5期)2016-06-12