人工势场法的移动机器人路径规划研究
2020-10-09 10:19李浩洋高英杰童东兵林旷淼史煜韬任晓文
汽车世界·车辆工程技术(上) 2020年5期
李浩洋 高英杰 童东兵 林旷淼 史煜韬 任晓文

摘 要:本文针对移动机器人,利用人工势场法,研究机器人的路径规划,得到移动机器人路径规划框架和建模方法,移动机器人路径规划评价模型、移动机器人路径规划实验校验及分析。
关键词:人工势场法;移动机器人;路径规划
0 引言
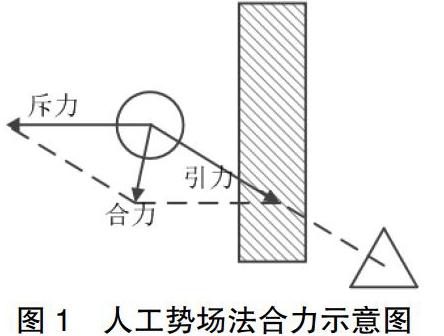
伴随着经济社会的不断发展,移动机器人技术开始应用到人们日常生活中。越来越复杂的场景,对移动机器人的路径规划技术提出了更高的要求。由于场景地图信息的缺失,移动机器人无法得到先验知识,而地图中有随机移动的障碍物,这些对机器人的实时避障与规划能力造成困难。关于路径规划中人工势场法,其思想是抽象为引力场,目标对智能体产生的引力和障碍物对智能体产生的斥力。人工势场法合力示意图如图1所示。因此,研究基于人工势场法移动机器人的路径规划具有十分重要的意义。
1 移动机器人路径规划建模和算法研究
首先对机器人接收到的传感器距离信息使用模糊规则进行判定,对障碍物进行简单的分类,防止一些可能导致机器人走进死胡同的情况;接着,使用人工势场法在处理过的地图的基础上进行路径规划,探索周围环境,得到路径;最后通过添加延迟时间以消除人工势场法可能存在的路径震荡问题,从而实现机器人对环境的探测与高效的路径规划。机器人路径规划框架图如图2所示。
机器人在活动空间中的定义。机器人与目标点之间的斥力场,机器人与目标点之间的引力场,那么总的势场为斥力场与引力场之和。
路径与障碍物的检测作为路径规划中的重要部分,不同方式会产生不同的效果。本项目使用超声测距仪来探测障碍物,设定基于超声测距仪的视窗,测距仪感应角15°。
2 移动机器人路径规划评价模型
在路径规划中,需要规划出一个无碰撞的路径。而运动的机器人按照规划的路径行走,可能发生两种结果,即碰撞和不碰撞。在构建路径规划的评价模型的时候,其主要参数有:是否发生碰撞、总时长、转弯角度、直行时间。
(1)是否发生碰撞。当移动机器人按照规划好的路径行走时,应当是不发生碰撞。如果发生碰撞,说明该路径规划的线路是有问题的。需要重新规划。因此,在路径规划中,移动机器人是否碰撞是判断路径规划的成败。(2)总时长。当移动机器人按照规划好的路径,从出发到移动结束,总时长越短越好。当移动机器人移动的速度恒定,那么路径规划的长度越长,所需要的时间就越长,这时候需要消耗移动机器人的能源也就越多。而路径规划的长度短的话,移动机器人移动的距离就越短,所耗费的能源就少。因此,在路径规划中,移动机器人的行走的总时长是重要的性能指标。(3)转弯角度。对于移动机器人来说,直线行走就不需要改变航向。由于障碍物的存在,移动机器人往往不是直线行走的,需要转向。因此,需要考察所设计的路径规划最大的转弯角度。转弯角度越大,对移动机器人的性能要求就越高。因此,在路徑规划中,移动机器人的最大转弯角度是重要的性能指标。(4)直线时间。从上面的分析,可以看到,在移动机器人行走的距离相同的时候,直线行走越长,对移动机器人的性能要求就越低。因此,在路径规划中,移动机器人的直线行走距离是重要的性能指标。
3 移动机器人路径规划实验分析
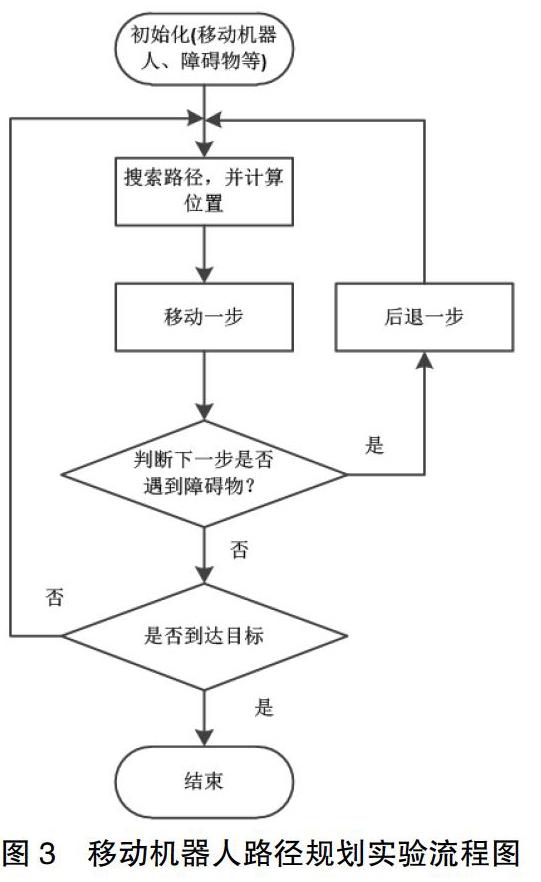
移动机器人的路径规划可看成搜索问题。在实验过程中,可以按照静态障碍物和动态障碍物来进行仿真。在路径搜索过程中,按照路径规划的目标对移动机器人产生的引力和障碍物对移动机器人产生的斥力来进行。在搜索过程中,为了避开障碍物,需要不断修改移动的方向。这个搜索过程,对计算能力要求高。当搜索出一条路径后,还需要与现有算法进行对比,是否为最优路径。以此来检验所设计的算法有效性和可靠性。具体移动机器人路径规划实验流程图如图3所示。
4 结束语
本文介绍人工势场法的原理,并针对移动机器人,研究机器人的路径规划,获得移动机器人路径规划框架和建模方法、路径规划评价模型、路径规划实验校验及分析。这些研究将为今后的研究拓宽思路。
参考文献:
[1]杨洋,童东兵,陈巧玉.面向未知地图的六足机器人路径规划算法[J].计算机应用,2018,38(06):1809-1813.
[2]石为人,黄兴华,周伟.基于改进人工势场法的移动机器人路径规划[J].计算机应用,2010(08):37-39.
基金项目:上海大学生创新训练计划资助项目(cs1902009; cs2002005);国家大学生创新训练计划资助项目(201910856010)
作者简介:李浩洋(1997-),女,甘肃天水人,本科,研究方向:自动化。
猜你喜欢
设计(2020年24期)2020-01-25
现代职业教育·中职中专(2018年11期)2018-06-11
中国新通信(2016年22期)2017-01-13
电脑知识与技术(2016年28期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年26期)2016-11-25
科学与财富(2016年28期)2016-10-14
科技视界(2016年20期)2016-09-29