
半潜式风力机平台撤除过程动力响应分析
2020-10-19 12:37刘清泉任年鑫周道成
海南大学学报(自然科学版) 2020年3期
刘清泉,任年鑫,周道成
(1. 大连理工大学 深海工程研究中心, 辽宁 大连116024; 2. 海南大学 土木建筑工程学院, 海南 海口 570228;3. 海南大学 南海海洋资源利用国家重点试验室, 海南 海口 570228)
我国海域辽阔,海上风能资源蕴藏丰富,特别是深海区域风力开发潜力巨大[1].近年来,清洁能源利用发展迅速,风力发电技术逐步成熟,使得海上风电开发开始向深海远岸发展[2].随着水深的增加,如果采用固定式基础成本会急剧增加,因此浮式基础成为深海风电的最优选择,半潜式基础吃水较小,稳性良好,运输安装便捷且成本相对较低,是海上浮式风机基础的首选结构形式之一[3].
国内外学者针对半潜式风力机开展了广泛而深入的研究.Roddier[4]等研究了Wind Float的可行性,进行了水动力计算和强度校核.Robertson[5]等提出OC4-DeepCwind半潜型浮式风机平台,研究了其静水力和水动力特征.唐友刚[6]等提出半潜式浮式基础的概念设计,并验证了该基础及其系泊系统具有抵抗极端海况的能力.邓露[7]等研究发现半潜式风力机平台的系泊系统起着减小平台运动并保证风机稳定作业的作用,在设计锚链的平面布置时,减小锚链与荷载方向夹角将有利于改善平台的动力特性.白旭[8]等运用ANSYS-AQWA软件研究锚链失效前后半潜平台的运动响应,锚链断裂后平台的纵荡、横荡以及横摇运动剧烈需要重点关注,避免影响平台的性能甚至发生安全事故.施伟[9]等采用ANSYS-AQWA分析软件对浮式风机在南海典型海况下的动力学响应进行了分析,发现当单根锚链发生断裂时,浮式风机的纵荡和运动会大幅增加,可能会引起平台失控.目前对于半潜式风力机平台研究大多是针对平台在工作海况、生存海况下的完整体系研究或是锚链断裂或者舱室破损的不完整体系研究,对平台在安装和拆除方面鲜有研究.
因此,笔者提出一种辅助缆-锚链撤除方法.以半潜式风力机平台系统为研究对象,采用时域模拟的方法,利用AQWA软件对其在锚链撤除的过程中动力响应进行数值分析,重点研究锚链撤除顺序与辅助缆刚度对半潜式平台运动响应的影响,提出一种使用辅助缆约束平台减小其锚链撤除过程的运动响应的撤除方法.该研究成果为半潜式海洋平台在撤除过程提供了工程理论基础.
1 数值计算方法
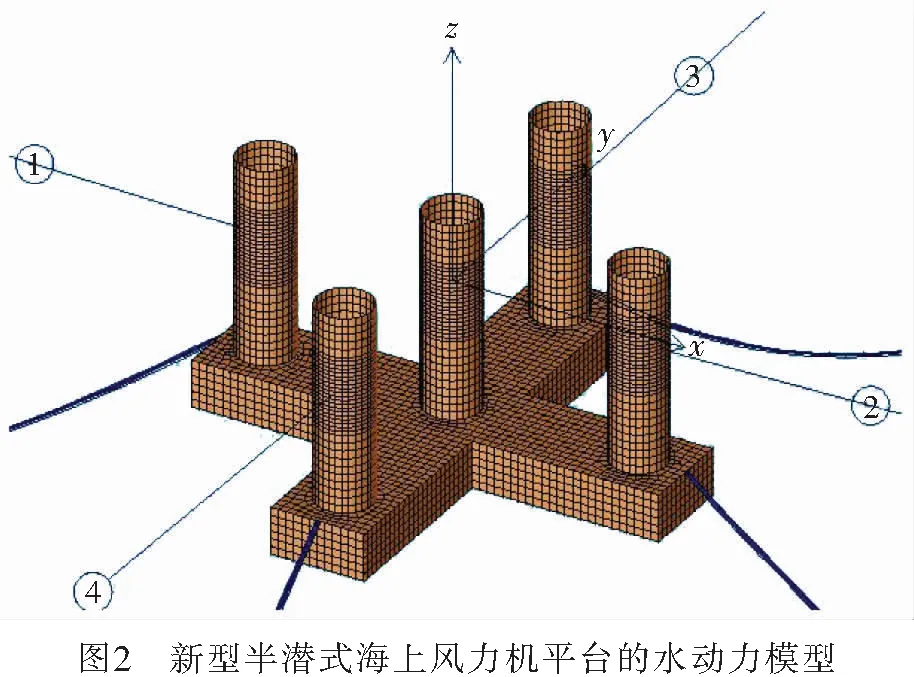
1.1 新型半潜式风力机平台拆除模型研究对象是一种新型无横撑和斜撑半潜式风力机平台基础,其具有便于运输,造价低,受力简单等优点.系泊系统由4根锚链组成,锚链采用对称布置,水平角度为90 °,拆除半潜式风机平台主要是拆除锚泊系统.辅助缆-锚链拆除具体做法是先使用工程船用辅助缆将平台约束(如图1所示),然后依次逐根撤除锚链,最后用辅助缆约束平台并用船拖离.

新型半潜式风力机结构系统设计参数如表1所示.

表1 新型半潜式海上风力机平台主要参数
1.2 平台在撤除过程中的动力方程考虑辅助缆与半潜式平台的机械耦合和水动力耦合效应,半潜式平台结构系统的动力方程
(1)
其中,M为质量矩阵,x为位移矩阵,C为阻尼矩阵,k为刚度矩阵,Fe为耦合波浪荷载矩阵,Fd为风荷载矩阵,Fm为锚链受力矩阵,Ft为辅助缆受力矩阵.除M外,其余参量均为时间t的函数.
1.3 水动力荷载分析基于势流理论,利用AQWA程序构建该新型半潜式海上风力机平台的水动力数值模型,如图2所示.为了保证计算结果准确性,单元网格采用map网格划分,并在水面线处网格进行加密处理,长度为0.5 m×1 m,其余位置网格长度为1 m×1 m.AQWA程序可以有效地模拟锚链系泊、二阶波浪力载荷等[10].风力机平台拆除时,风力机应处于停机状态,此时平台所受的风荷载主要为塔架和平台所受的风荷载,且撤除海况应选取风平浪静的海况,在撤除海况下波浪荷载为主要影响因素,本次计算中主要考虑波浪荷载对平台的作用,忽略风荷载的影响.
2 主要模拟结果分析
2.1 辅助缆刚度对平台的运动响应的影响选取典型规则波浪(波高2 m,波周期5~15 s),研究不同波浪周期下辅助缆的刚度对平台系统的运动响应的影响.为了保证半潜式风力机平台撤除过程中在波浪作用下的安全,对比3种不同刚度辅助缆对半潜式平台主要动力响应特征的影响,如图3所示.
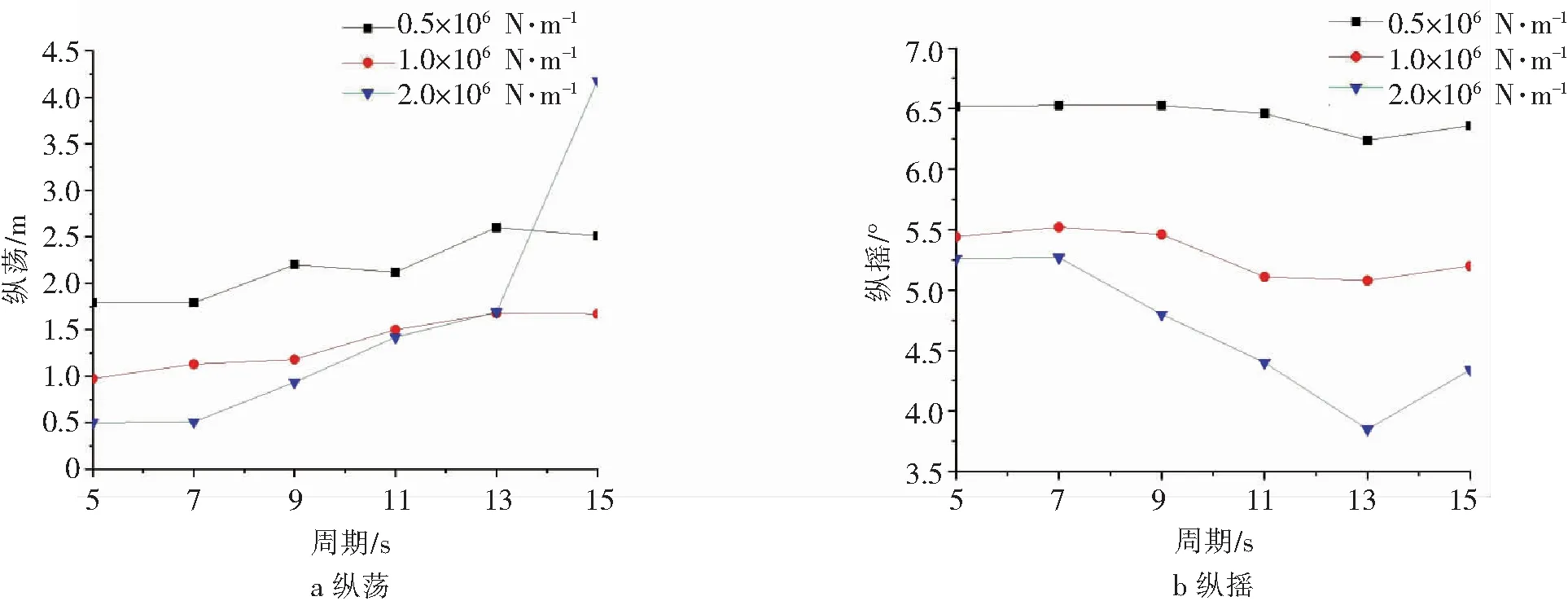
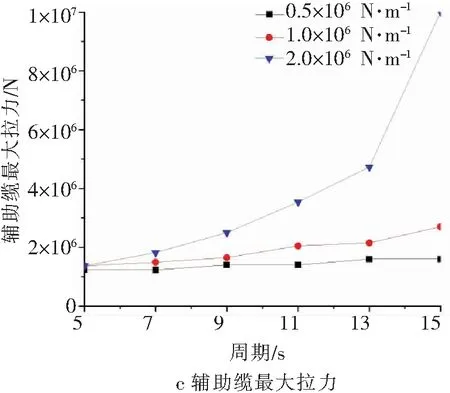
图3 不同刚度辅助缆对平台的主要参数影响
由图3a和图3b可以看出,辅助缆刚度为0.5×106N·m-1和1×106N·m-1时,同一波浪周期下辅助缆刚度越大平台的纵荡响应和纵摇响应越小,辅助缆能有效的降低锚链撤除时平台的纵荡和纵摇响应幅值.主要由于辅助缆增加了平台的约束,承担了一部分的波浪荷载,减小了平台在锚链撤除时的运动响应.辅助缆刚度越大,平台的运动响应减小的越明显,但是辅助缆的刚度增大到2×106N·m-1时会使平台在长周期波浪条件下的运动响应剧烈且辅助缆拉力急增,产生“共振”现象.由于半潜式风力机平台靠锚链约束时水平刚度小,固有周期大,加上辅助缆后,平台的水平刚度明显变大,固有周期也随着减小,可能会长周期波浪条件下产生共振现象.而小刚度辅助缆对平台的约束小,平台的运动响应大.因此选取2×106N·m-1刚度的辅助缆.
2.2 辅助缆预张力对平台的运动响应的影响为了进一步降低锚链撤除瞬间平台的运动响应,避免辅助缆出现松弛现象,研究辅助缆预张力对平台运动响应的影响.选取JONSWAP谱描述不规则波浪,谱峰因子γ = 3.3,有义波高为2 m,谱峰周期为9 s,设定模拟时间为6 000 s,锚链撤除时刻为3 000 s,假定入射波浪沿x轴方向.在辅助缆刚度同为1×106N·m-1的条件下,结合辅助缆的刚度对比3种不同预张力辅助缆对半潜式平台主要动力响应特征的影响,锚链撤除后平台主要动力响应参数如表2所示.
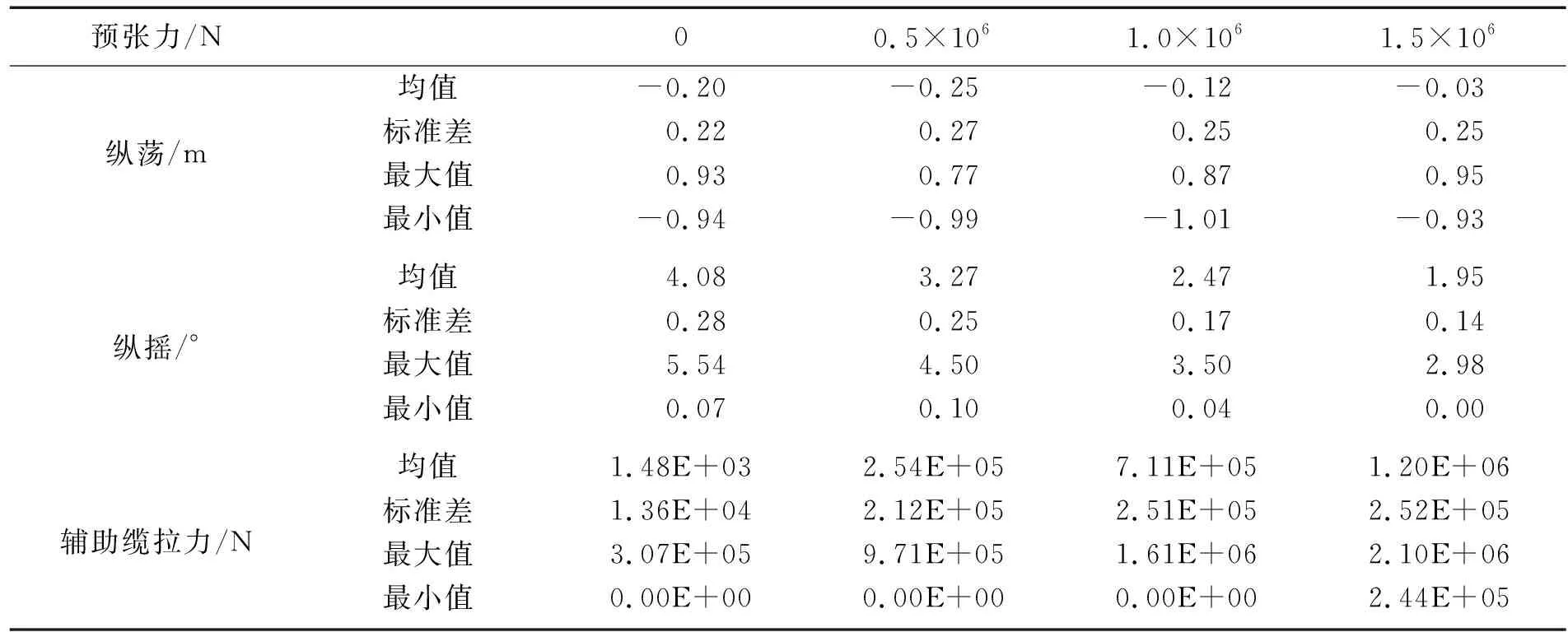
表2 不同预张力半潜平台主要参数
从表2中可以看出,撤除锚链后平台的纵荡和纵摇响应统计均值均不为零,说明平台在锚链撤除后产生了向x轴正方向上的倾斜.辅助缆的预张力主要影响平台的纵摇响应,3种不同的预张力纵摇最大值分别减小了约19%、37%和46%,对纵荡响应影响不明显.

由图4可以看出锚链撤除后,不同预张力对平台的纵摇响应的影响明显,预张力越大,锚链撤除后平台的纵摇幅值越小.预张力也会影响辅助缆的拉力幅值,增大辅助缆的预张力会使辅助缆最大拉力增大,会有辅助缆断裂的风险.0.5×106N的预张力在撤除过程中辅助缆会出现松弛现象,也不利于保证撤除过程的安全.
2.3 撤除锚链顺序对平台的动力响应的影响根据已构建的半潜式风力机平台基础时域分析模型,分析锚链拆除顺序对平台基础动力响应的影响.选取JONSWAP谱,谱峰因子γ=3. 3,有义波高为2 m,谱峰周期为9 s,设定模拟时间为6 000 s,锚链撤除时刻为3 000 s,假定入射波浪沿x轴方向.考虑到锚链对称布置特征,在辅助缆刚度同为1×106N·m-1,预张力同为1.5×106N的条件下,选取3种不同顺序的锚链拆除方案进行对比,如表3所示.

表3 锚链撤除方案
在锚链撤除之前,需先用辅助缆进行平台“加固”.为了节约工程成本,不会同时布置4条辅助缆,而是在撤除锚链必要时布置相应方向的辅助缆,比如B方案先对称布置x方向的2条辅助缆撤除x一号锚链,再对称布置y方向的2条辅助缆撤除y三号锚链,最后依次撤除二号、四号锚链,既保证了平台锚链撤除时的安全性,又节约了成本保证了工程的经济性.
3种不同顺序的锚链撤除方案对平台的运动响应特征值的影响如图5所示.
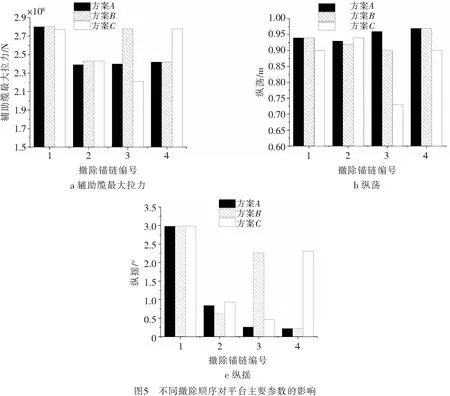
由图5a可以看出,锚链拆除顺序的不同对辅助缆的拉力影响较小,最大拉力基本位于2.2~2.8×106N之间.由图5b可以看出,A方案和B方案在撤除过程中纵荡响应基本相同,C方案由于最先撤除垂直于来波方向的三号锚链,平台的纵荡响应最小,但四号锚链撤除时响应最大.由图5c可以看出,由于锚链的对称布置,采用对称撤除的A方案对平台的纵摇响应影响最小且没有出现纵摇增大的现象.撤除锚链时会破坏平台在此方向上的平衡导致运动响应增大,但同一个方向的2条锚链全部撤除完毕时,平台恢复这一方向的对称受力,平台的运动响应因而减小.因此选用对称撤除的A方案最佳,即先撤除来波方向x方向的2条锚链,后撤除y方向的2条锚链.
3 小 结
采用ANSYS-AQWA软件,针对半潜式浮式风机在锚链撤除过程中,不同辅助缆特性(刚度和预张力)和锚链撤除不同顺序的运动响应进行了对比分析,获得以下结论:
1) 通过对比规则波作用下锚链撤除时不同刚度辅助缆对平台的运动响应,指出辅助缆能有效地降低锚链撤除时平台的纵荡和纵摇响应.但是辅助缆会影响平台的固有频率,刚度增大到2×106N·m-1时会使平台在长周期波浪条件下产生“共振”现象.
2) 通过对比典型海况下锚链撤除时辅助缆不同预张力对平台的运动响应,指出增大预张力可有效的降低平台的纵摇响应,但对平台的纵荡响应影响小;此外增大辅助缆的预张力会显著地增加辅助缆的拉力,不利于保证撤除过程的安全.
3) 通过对比典型海况下不同锚链撤除顺序对平台的运动响应的影响,指出采用对称撤除锚链方案可有效的降低平台的纵摇响应.
猜你喜欢
农业工程学报(2022年7期)2022-07-09
全球定位系统(2021年3期)2021-08-07
能源工程(2021年1期)2021-04-13
全球定位系统(2020年3期)2020-07-15
船舶与海洋工程(2019年6期)2019-12-25
水上消防(2019年1期)2019-12-01
价值工程(2019年36期)2019-01-11
水运管理(2017年11期)2018-01-02
北京航空航天大学学报(2017年3期)2017-11-23
科学中国人(2016年1期)2016-01-13

- 海南大学学报(自然科学版)的其它文章
- 岩原鲤仔稚鱼生长发育过程中消化酶活性的变化
- 多排冻结管斜型排布温度场发展规律数值分析