汽车自动紧急制动系统行人测试与评价方法
2020-10-21 17:29林国庆韩龙飞王睿希
汽车安全与节能学报 2020年3期
林国庆,逯 超,韩龙飞,王睿希
(长安大学汽车学院,西安710064,中国)
自动紧急制动系统(autonomous emergency braking system,AEB)是高级驾驶辅助系统(advanced driving assistant system,ADAS)的重要功能之一,是一种重要的主动安全技术。哥德堡大学Rosen等[1]进行的一项前瞻性研究结果表明:AEB系统可以避免交通事故所致的40%死亡人数和27%重伤人数;2010年,Lindman[1]等的研究表明AEB可以降低24%的行人死亡人数; 2011年,Hannawald[1]进行的研究表明:具有行人保护功能的AEB可以减少14.3%的重伤人数和11.1%的死亡人数。可见,AEB具有大幅度提高行人保护的能力,因此,全面开发、测试和推广AEB显得十分重要。
目前国内外学者对AEB的研究主要集中在控制策略和目标检测(车辆、行人等)上,但作为AEB重要功能的行人自动紧急制动系统(pedestrians autonomous emergency braking system,AEB-P)的法规或标准、测试与评价方法却比较匮乏。由于各国的交通状况和驾驶员驾驶特性存在差异,国外的测试方法并不能完全应用于中国,因此,建立符合中国国情和驾驶员行为的AEB-P测试与评价体系显得格外重要。目前,国外一些安全评价机构如美国高速公路安全管理局(National Highway Traffic Safety Administration,NHTSA)、欧洲新车安全评鉴协会(European New Car Assessment Programme,Euro-NCAP)等已针对AEB的行人避撞系统功能发布了测试与评价方法。欧洲先进前瞻性安全系统(advanced forward - looking safety systems,VFSS)对GIDAS、DEKRA等数据库进行研究,设计了4类AEB-P测试场景[2];AEB Group[3]对STATS9、OTS等数据库进行聚类分析,设计了5类AEB-P测试场景;欧洲的APROSYS(advanced protection systems)利用德国交通事故数据库建立了3类AEB-P测试场景[4];英格兰伯克郡交通研究室M. Edwards等[5]结合Euro-NCAP被动安全测试设计了一种基于“利益”的方法,对AEB行人保护系统性能进行综合评估。同济大学的刘颖、贺锦鹏等[6]通过采集并筛选上海地区车与行人的危险场景,用聚类分析方法设计了5类典型的危险场景;苏江平、陈君毅等[7]通过对中国5个典型城市乘用车的自然驾驶数据的研究,得到基于中国危险工况的行人交通冲突特征,利用聚类分析方法提取出4类典型危险场景;湖南师范大学、湖南大学的吴俊、向国梁等[8]基于2018版中国新车评价规程(China new car assessment programme, C-NCAP) AEB行人测试场景开发了一种汽车紧急制动行人检测系统,实验结果表明该系统一次成功率可达90%以上。
2018版C-NCAP发布了AEB-P的一些测试方法与评价标准,将测试场景分为近端和远端,弥补了中国在AEB行人测试与评价上的空缺。但是测试场景单一,不能全面反映中国行人典型危险场景。
鉴于以上情况,本文利用中国交通事故深入研究(China in-depth accident study, CIDAS)乘用车事故数据,借鉴国内外研究成果,参考Euro-NCAP的AEB行人测试方法,制定出符合中国国情的AEB-P多种不同测试场景。其中,引入层次分析法(analytical hierarchy process,AHP)搭建AEB-P层次模型;根据模型得到判断矩阵,计算各工况权重系数,综合获得AEB-P测试与评价方法;最后,利用PreScan对上述方法进行仿真测试,验证了上述方法的有效性和实用性。
1 行人自动紧急制动系统 (AEB-P)测试场景研究
根据中国CIDAS乘用车事故场景排序靠前的统计[9],如表1所示,车辆与两轮车发生碰撞的场景中,车辆直行与左/右侧穿行的两轮车发生碰撞的事故数量最多,分别排第1和第2位;车辆行驶与左侧和右侧盲区内的两轮车发生碰撞的事故数量分为排第6和第7位;夜间和白天,车辆直行与前方纵向行驶的两轮车发生碰撞的事故数量分别排在第10和第13位;车辆左转(右转)与右侧 (左侧)穿行的两轮车发生碰撞的事故数量分别排在第16和第17位。车辆与行人发生碰撞的场景中,事故数量排序靠前的场景有:车辆直行与右侧穿出的行人发生碰撞的事故数量排第9位,车辆直行与左侧穿出的行人发生碰撞的事故数量排第14位。以上统计表明,车辆与两轮车发生碰撞的概率大于与行人发生碰撞的概率。
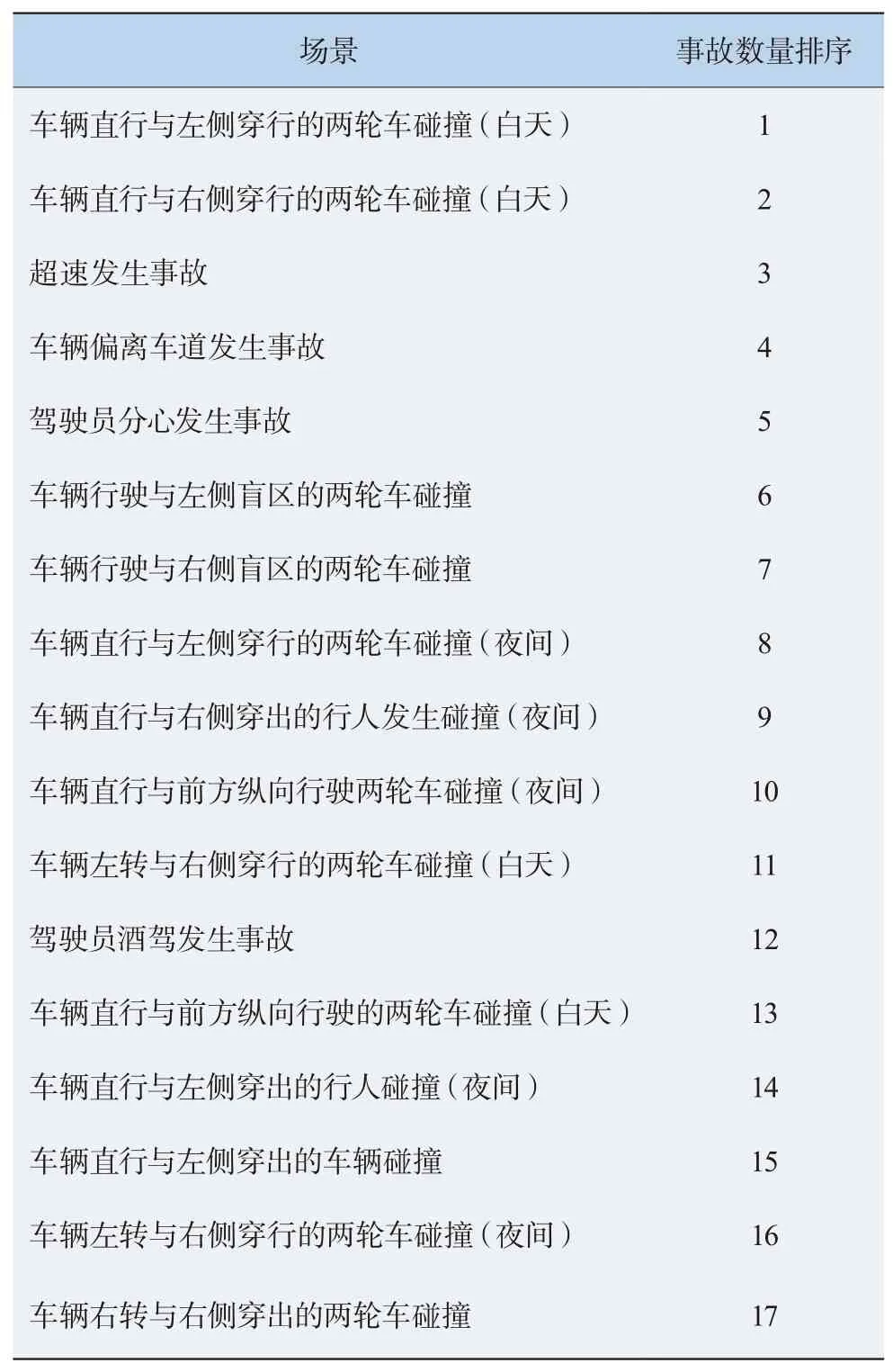
表1 CIDAS乘用车事故数据分析
根据瑞典真实车祸记录数据(包含警方数据记录和医院数据记录)[10], 2 297名受伤者中有1 184名行人,占比约50%,3 651名受伤者中有2 029名骑自行车的人,占比约56%,且男性占大多数。
根据上述中国发生道路交通事故的统计,借鉴国外已有的研究成果,本文制定了如图1 AEB-P测试场景。
2 行人自动紧急制动系统(AEB-P)评价方法
2.1 建立AEB-P评价模型
根据图1所示测试场景,利用层次分析法(analytic hierarchy process , AHP),本文建立了如图2所示的层次模型。
基于AHP法的基本原理,同层元素间的相对重要性的比较可用判断矩阵表示,矩阵中各元素表示同层元素之间相对重要程度的直观数值。若用M、Z、F分别表示图2所示AHP模型的目标层、约束层、方案层,则M层相对于Z层的判断矩阵A可表示为
在行人横穿测试场景下,Z层相对于F层的判断矩阵B为
矩阵元素bij代表元素i、j相对重要性比较,且bij与bji互为倒数,即:
按照AHP法的原理,矩阵元素bij需取1、3、5、7、9,取值含义如表2所示。
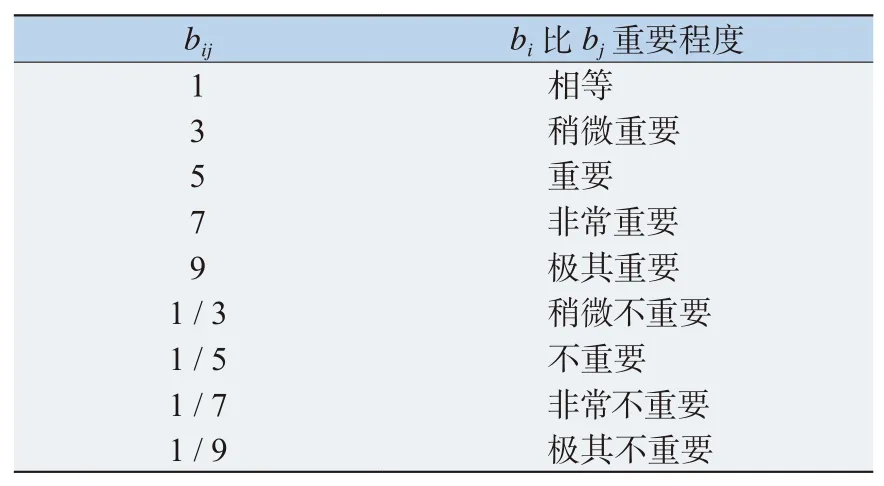
表2 矩阵元素取值含义
上海交通大学郭磊及其课题组[11]调查了上海市一定范围内所发生的两轮车交通碰撞事故,在调查中将交通方式分为行人、自行车、摩托车、助动车和其他,对死亡人员进行分类分析,得到不同交通方式死亡人数统计。调查结果表明,两轮车发生事故所致死亡人数所占比例明显大于行人死亡人数。根据交通事故形态分析统计(图3),碰撞两轮车(摩托车、自行车等)发生的事故占比49%,而碰撞行人仅占20%。他们的调查结果与CIDAS交通事故形态分析统计结果基本一致。
综合以上信息,并参考文献[9]和文献[13-15],本文构建出M层 (AEB行人测试评价系统) 相对于Z层6种场景(行人横穿马路、行人沿路、骑行者横穿马路、骑行者沿路行驶、交叉路口、夜间行人测试)的判断矩阵为
解得C的最大特征值为6.533 9,对应的特征向量为α =(0.165 7,0.082 3,0.887 5,0.413 0,0.072 8,0.048 5),归一化后β =(0.072 1,0.024 0,0.504 8,0.360 6,0.024 0,0.0144) ,则β中各元素分别为Z层6种场景的权重系数。
获取到M层相对于Z层的权重系数后,还需对Z层相对于F层的权重系数逐一计算。以骑行者横穿场景为例,Z层相对于F层的判断矩阵为
根据CIDAS乘用车事故数据分析(表1),车辆直行与左侧盲区和右侧盲区二轮车发生碰撞的事故数量排名相近,因此认为在有视野遮挡下,骑行者左向右横穿比右向左横穿介于稍微重要与相等之间(取值为2)。无遮挡场景比有视野遮挡发生碰撞事故数量多,故认为骑行者右向左横穿场景比左向右横穿(遮挡)场景稍微重要(取值为3),骑行者右向左横穿场景比左向右横穿(遮挡)场景介于稍微重要与重要之间(取值为4)。结合以上分析,制定骑行者横穿马路场景下Z层相对于F层的判断矩阵为
解得D的最大特征值为3.02,其所对应的特征向量为n= (0.35,0.20,0.91),归一化后n= (0.24,0.14,0.62),则0.24、0.14、0.62分别为骑行者横穿场景下各工况的权重。同理,可分别计算出其他几种工况下Z层相对于F层的权重系数。计算可得,行人横穿测试场景下各工况的权重为:0.30、0.28、0.16、0.22、0.14;行人沿路场景下各工况的权重为:0.68、0.32;骑行者沿路场景下各工况的权重为:0.71、0.29;交叉路口场景下各工况的权重为:0.82、0.18;夜间测试场景下各工况下权重为:0.5、0.15、0.1、0.25。
分别对M层相对于Z层的判断矩阵C,Z层相对于F层的判断矩阵D进行一致性检验,
一致性指标为
一致性比率为
其中:λmax表示矩阵的最大特征根;n表示矩阵(方阵)维数;RI表示随机一致性指标,可根据n的大小查表获取。本文判断矩阵C的最大特征根λmax= 6.533 9,n= 6,查表得RI = 1.24,带入式(8)和式(9),得CR= 0.086 < 0.1,说明判断矩阵C具有良好的一致性。同理可求得矩阵D得一致性比率为0.008 9 < 0.1,因此,判断矩阵D也具有良好的一致性。
2.2 评价指标及规则的制定
AEB系统的主要作用是避免或减轻碰撞,与此同时也应考虑到车内乘员的舒适性,过大的制动减速度或频繁制动会降低人们的乘坐舒适性,因此有必要从安全性和舒适性2个维度进行综合评价。影响AEB系统的安全性与舒适性的因素主要分为2类:直接因素和间接因素,如图4所示。
根据影响AEB系统的安全性与舒适性的因素(见图4),本文制定了图5所示的AEB评价指标层次模型图,根据图2(AEB-P评价层次模型)中的6种场景18种测试工况,对于每种不同的工况分别从安全性和舒适性两方面进行评价,给予安全性与舒适性不同的权重。由于预碰撞时间(time to collosion,TTC)与相对距离能够间接反映最大制动减速度,且难以对最大制动减速度进行限制,因此,本文使用AEB起作用时间TTC、相对距离(车辆停止时与目标物的距离)、速度减少量3个指标分别对AEB的安全性与舒适性进行评价,最后根据安全性与舒适性的权重对AEB进行综合评价。
AEB的评价主要考虑其安全性,根据层次分析法,安全性与舒适性之间的判断矩阵为E,计算可得安全性与舒适性的权重分别为0.83、0.17。1) AEB起作用时间TTC,TTC广泛用于评价AEB系统的性能,其计算方法如式(10)所示,Srel表示车辆与目标物的相对距离,vrel表示相对速度。通常认为在视野被遮挡的场景下规定系统应至少在TTC = 1.5 s时开始制动;对于视野没有遮挡的场景,规定系统应至少在TTC = 1.2 s时开始制动。TTC能够间接影响AEB系统的安全性与舒适性,TTC越大,说明AEB系统需要较早地以较小制动减速度缓慢制动,则舒适性较好;反之,舒适性差。
2) 相对距离d,指车辆停止时与目标物的距离,根据大多数驾驶员的驾驶特性,车辆停止时,前后两车之间的距离通常为0.5 ~ 3.0 m。通常,距离愈大,制动时间越早,制动减速度也较大,舒适性较差,安全性越好。
3) 速度减少量η,它是影响汽车安全性的重要的直接因素,随车速的不同而变化,因此采用百分比的形式定义速度减少量,如式(11)所示,vinit表示汽车的初始测试速度,vcoll表示汽车碰撞时的速度。速度减少量越大,碰撞严重程度越低,安全性越高。当速度减少量为100%时,代表无碰撞。
综合以上分析,3个指标相互影响,难以明确区分,本文认为TTC与相对距离的重要程度相等,更多地考虑到安全性,认为速度减少量的重要性大于TTC和相对距离,因此制定3个评价指标之间的判断矩阵F,计算可得3个评价指标的权重分别为:0.25、0.25、0.50。
最终根据安全性与舒适性的权重得到总分,按照总分对AEB-P进行综合评价,评价规则如表3所示。

表3 星级评价规则表
2.3 测试得分的计算
式(13)给出了测试结束时最终所得分数H的计算式:
其中:S为测试所用总分制(如5分、10分等),m为测试车速数量,αi为不同场景的权重,βj为不同场景下不同测试工况的权重,Aw,Bw,Cw分别为3个评价指标所占的权重,λk、ηk、δk依次表示3个评价指标在m个车速下的测试分数。
3 虚拟测试与评价
目前,国内外学者对智能网联汽车技术研究较多,而对智能网联汽车测试与评价方法的研究相对比较匮乏。智能网联汽车测试主要分为虚拟测试、封闭道路测试以及开放道路测试,由于当前中国相关法规、规章制度、测试方法、标准等还不够完善,因此虚拟测试仍是智能网联汽车常用的测试方法,具有简单、快速、成本低的优点。PreScan是由荷兰国家应用科学研究院(Netherlands Organisation for Applied Scientific Research, TNO)开发的一款能够快速建立交通场景的仿真软件,可以与Simulink、CarSim等进行联合仿真,被广泛应用于无人驾驶汽车、高级驾驶辅助系统(advanced driver assistance system,ADAS)的开发。本文利用PreScan软件,搭建典型测试场景对本文所提出的测试与评价方法进行仿真测试,所选测试车辆为PreScan软件里的奥迪A8,车辆参数如表4所示。
AEB控制逻辑为:当TTC > 2.6 s时,系统不制动;当1.6 s < TTC < 2.6 s时系统进行部分制动(50%的制动强度);当TTC < 0.6 s时,系统以最大制动强度全力制动(制动强度为100%)。
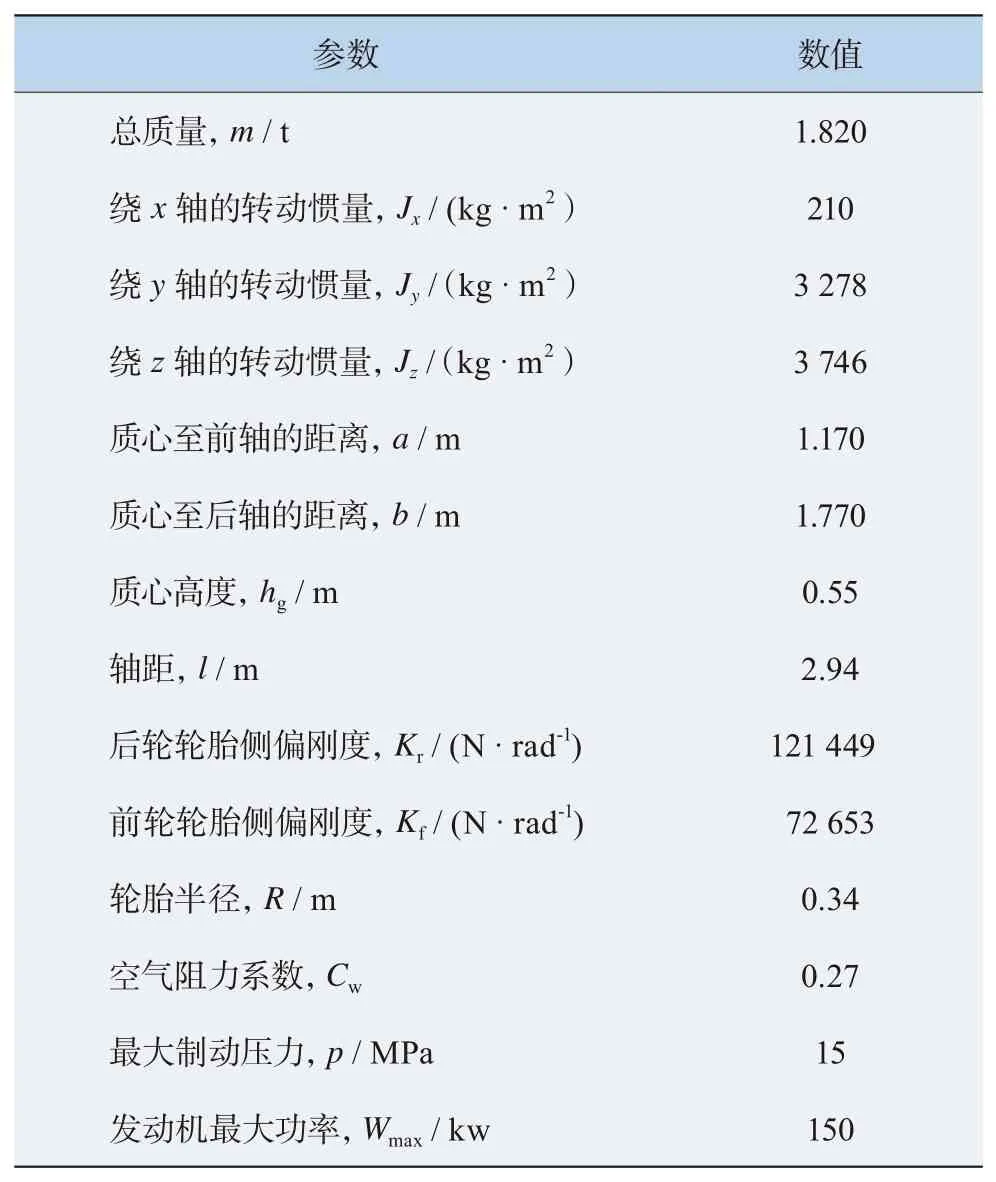
表4 车辆基本参数配置
3.1 行人沿路(50%偏移)测试
该场景的测试结果如图6所示。测试时.分别对车辆进行30、40、和50 km/h的速度进行测试。测试结果表明,在当前场景下,车辆能够在30、40 km/h的速度避免与行人碰撞,并与行人保持了一定的安全距离。车辆停止时,由于行人继续保持当前的速度向前行走,因此在仿真结束前TTC和相对距离d曲线会有短暂的变化(距离达到最小后稍微增大,TTC瞬间增大)。虽然在50 km/h的速度下不能避免碰撞,但速度能够降低大约64%,起到了减轻碰撞的作用。
3.2 行人右向左横穿(25%偏移)测试
该场景下测试结果如图7所示。测试时,分别对车辆进行30、40、50 km/h的速度进行测试。测试结果表明,汽车能够在30、40 km/h的速度避免与横穿马路的行人发生碰撞,在30 km/h的速度下相对距离约为1 m,在40 km/h的速度下相对距离约为0.69 m。由此可知,随着车速的增加,相对距离逐渐较小,碰撞风险增加,当速度达到50 km/h时,汽车无法与行人避免碰撞,速度减少约43%,能够有效减轻碰撞。
选取部分场景进行仿真测试,根据AHP方法,分别计算行人右向左横穿25%偏移(A-场景)、行人沿路25%偏移 (B-场景)、骑行者右向左横穿50%偏移(C-场景)、骑行者沿路50%偏移(D-场景)以及车辆左转(E-场景)共5种场景进行虚拟仿真测试,各场景所占权重分别为[0.15 0.15 0.3 0.3 0.1]。测试时,行人速度设为5 km/h,骑行者速度设为15 km/h,车辆速度分别为30、40、50 km/h。以车速v= 30 km/h为例,给出不同场景下的碰撞时间(TTC)、车辆相对距离d及速度减少量η进行计算,根据本文所提评价方法,以10分制为例,计算出上述5种场景下的安全性和舒适性得分(表5列出了该车速下的仿真测试结果)。以此方法再进行40、50 km/h下的仿真,得到各车速下不同场景的安全性和舒适性所占比重(得分),最后再根据所有仿真条件下安全性和舒适性的得分,计算得到评价总分。在这3个速度下的评价总分 =(每个车速下安全性得分 + 每个车速下舒适性得分) / 3 = 5.5分,按照本文评分规则(见表3):4~6分为一般,因此本次测试结果为一般(★★)。
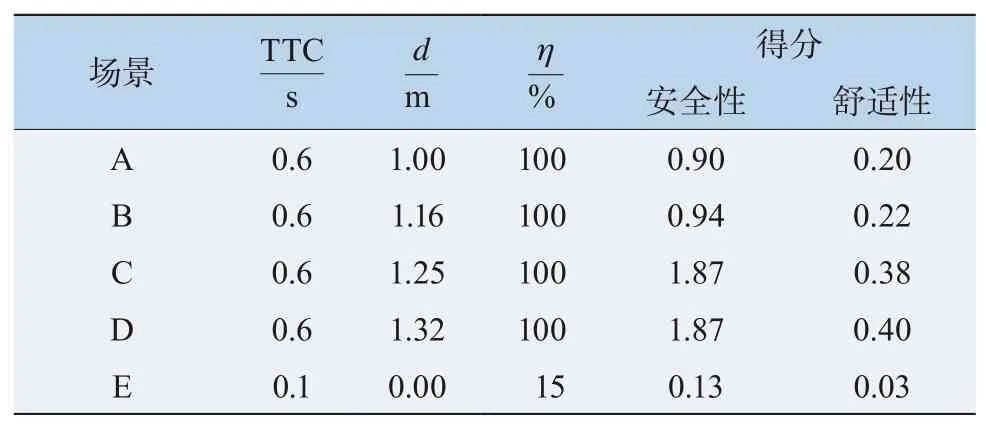
表5 v = 30 km/h时的测试与评价结果
4 结 论
本文根据中国交通事故深入研究(CIDAS)乘用车事故数据,借鉴国内外研究成果,主要参考中国新车评价规程(C-NCAP)中的汽车自动紧急制动系统(AEB)行人测试方法,并借鉴欧洲新车安全评鉴协会(Euro-NCAP),制定出符合中国国情的多种行人自动紧急制动系统(AEB-P)测试场景。利用层次分析法(AHP)搭建各个场景下的层次模型,确定出各层次间的判断矩阵,计算获得各层次的权重系数。结果表明:通过引入碰撞时间TTC、相对距离和速度减少量作为AEB-P的评价指标并给予不同的权重,在PreScan中对提出的测试场景建模,提出的AEB-P测试与评价方法的合理性和实用性得到验证,避免了单一评价指标在评价AEB-P时的不合理性,可以为中国的AEB-P测试与评价提供参考。由于本文采用虚拟仿真测试,因此与实车测试还存在一定的差距。
猜你喜欢
福建轻纺(2022年4期)2022-06-01
心理学报(2022年5期)2022-05-16
载人航天(2021年5期)2021-11-20
现代仪器与医疗(2021年2期)2021-07-21
纺织科技进展(2021年3期)2021-06-09
意林(2021年5期)2021-04-18
当代陕西(2020年17期)2020-10-28
扬子江(2019年1期)2019-03-08
人大建设(2018年5期)2018-08-16
证券市场红周刊(2018年3期)2018-05-14