煤矿井下风门自动闭锁系统的研究与设计
2020-10-26 09:00王志军
机电工程技术 2020年9期
王志军
(山西煤炭进出口集团左云长春兴煤业有限公司,山西大同 037000)
0 引言
井下通风是煤矿采掘作业前一个重要的基本环节,对于矿井的安全建设和工作生产顺利进行具有重大影响[1]。在井下巷道内需要对风流进行控制、隔断和引导,使风流按照指定方向流通,其中风门就属于井下常见的风流隔断设备。按照井下通风的整体设计规划,在工人和矿车通过但不允许风流存在的巷道内,需要安装风门对风流进行阻断,并且还要保证工作线的通行畅通,避免在开关门时发生碰撞事故。
目前许多企业仍采用人工控制风门开启、关闭,劳动强度大、效率低下,在开、关门时还容易发生碰撞事故,这种落后的控制方式无法满足现代煤矿的需求。本文设计了一种基于PLC 和光敏传感器的煤矿井下风门自动闭锁系统,不仅实现了风门的自动化控制[2],还可在不同的对象通过时进行智能识别,并且在硬件的选型设计时满足了防爆的特殊需求。
1 系统设计总体方案
根据井下实际需求,在巷道内需要设置A、B 两扇风门,当一扇风门处于开启状态时,另一扇风门应当关闭且不能被打开,只有关闭了开启风门后,另一扇风门才可开启[3],实现互锁,以此保证巷道内的风流平衡。风门自动闭锁系统具有自动和手动两种风门控制模式,系统正常运行时,A、B风门的开启关闭均由PLC 实现自动控制,在发生故障或检修时,可切换至手动模式通过按钮实现开关风门。系统整体结构如图1所示,其中每扇风门都包含2个用于检测风门状态的开关门到位传感器[4]、1 组用于辨别通行目标是行人或矿车的光电传感器、1 个提供动力的液压缸、2 个二位四通电磁阀和1 个用于提示报警的声光报警箱以及手动控制按钮。风门的传动装置采用液压泵站配合液压缸的形式,液压站含有2 台液压泵,采用一主一备的工作方式提高系统可靠性。当无工人或矿车通过时,风门处于关闭状态,当有目标通过时,传感器检测并传输不同的信号至PLC,PLC控制液压缸开启风门;当目标通过后,检测区域的传感器不再发出信号,PLC 延迟一段时间后关闭风门,具体延迟时间可设置[5]。
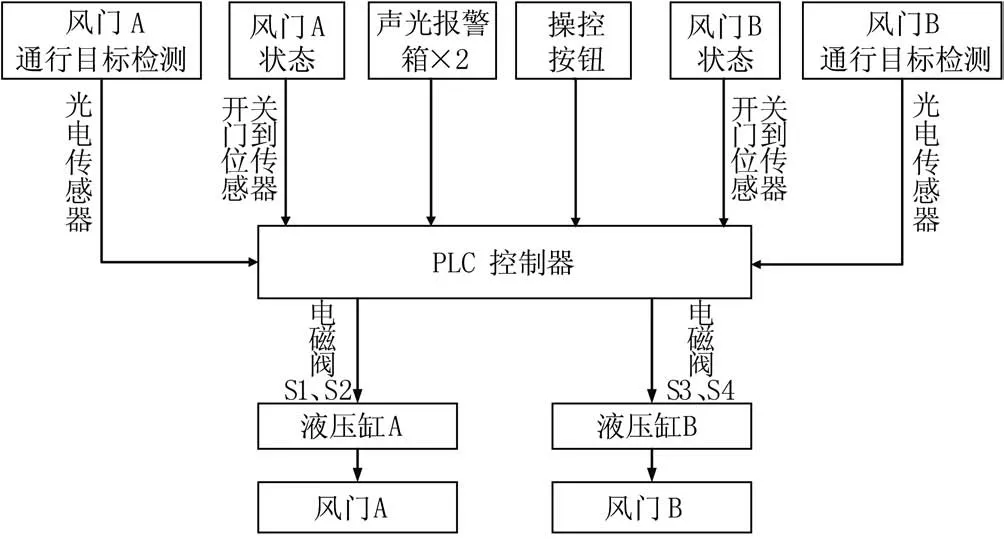
图1 系统整体结构图
2 硬件方案设计及选型
由于井下特殊环境的要求,在进行硬件方案设计时要尽可能符合本质安全的原则,不满足本质安全的设备和电路需集成在防爆箱内进行隔爆处理。
PLC 控制器是本系统的核心部分之一,本文选用西门子S7-200 可编程控制器。S7-200 PLC体积小巧、价格低廉、扩展性能强大,完全满足本系统的控制需求。PLC 的CPU 选择S7-226,该CPU 采用24 V DC 输入、输出,具有24 路数字量输入和16路数字量输出,允许最大扩展7个I/O模块,集成多种通讯功能,可实现RS-485、PPI 和MPI 通讯,同时还具有自整定PID、在线编程、数据记录等多种功能。
光电传感器也是本系统的核心部分,每扇风门附近都对称设置了2个光电传感器,形成了一个通行目标检测区域。传感器采用对射式安装,既增大了检测的辐射面积,又减少了由碰撞、摩擦等引起的意外损害和故障,传感器检测区域如图2所示。

图2 检测区域示意图
工人正常的移动速度一般为1~1.5 m/s,人体前后宽度一般在0.3 m以内;矿车的移动速度一般为2~4 m/s,且车身长度一般在1.5 m以上。当工人正常通过检测区域时,光电传感器会发出大于或等于350 ms的脉冲[6];当矿车通过时,光电传感器发出的脉冲大于或等于450 ms,光电传感器将不同的脉冲信号传送至PLC 后,PLC 执行运算即可区分通过目标是工人还是矿车,不需增加传感器数量即可实现智能识别。
本文选用ZP-12G 型矿用光电传感器,额定工作电压为12 V DC,额定工作电流小于或等于30 mA,探测范围大于或等于5 m,当检测到人体或矿车信号时刻瞬时做出反应,输出不同的脉冲信号。
开关门到位传感器用于检测风门状态,保证A、B风门的互锁,本文选用GFK40 型矿用风门开闭状态传感器,其接电容量为DC12 V/0.05 A,当风门开启时,“开”状态常开接点闭合,此时低电压小于0.5 V;当风门关闭,“关”状态常开接点断开,此时漏电阻大于100 kΩ,可实现风门状态的判断。
声光报警箱可在门开启、关闭或者发生故障、进行维修维护等不同状态下发出对应的声光报警信号,语音信号放大采用TDF8546J汽车音频放大器实现,其输出功率较大,抗干扰性能良好,电路也较为简单,其功能电路板都集成于独立的防爆箱内,以满足隔爆要求[7]。
3 软件方案设计
系统控制主流程如图3 所示。当有目标通过检测区域时,传感器A1 检测到并向系统发出信号,PLC控制风门A 开启,目标通过风门A。计时器T1 用于记录通过目标的脉宽以判断目标是行人还是矿车,当传感器A2 检测到有目标通过时,T1启动计时,当A2检测不到目标时,停止发送信号,T1计时停止并清零,若T1计时小于或等于350 ms,说明是行人通过,若计时大于或等于450 ms,则说明是矿车通过。

图3 系统控制主流程图
在系统中还设置了2 个延时定时器,用于判断矿车和行人是否全部通过,分别为矿车信号延时定时器T2和行人信号延时定时器T3[8]。T2的初始设定值为1 s,T3的设定值需大于T2。当有目标通过并被传感器A2检测到时,每有一个通过目标都会使A2发送一个上升沿电平信号将T2置0,目标通过后A2 发出下降沿信号,T2 重新开始计时。当有一组矿车通过时,每节车厢通过的间隔时间远小于1 s,T2在此期间不断被清零,当最后一节车厢通过后,A2发出下降沿信号,T2开始计时,直到T2达到1 s设定值时,说明这组矿车已全部通过。当T2 达到设定值1 s 时,系统会通过T1 的计时情况判断通过目标是矿车还是行人,如果是矿车,则符合上述过程,矿车通过后关闭A门即可,若此时T1判断通过目标为行人,T3开始工作。T3 的计时过程和T2 相同,但T3 的延时设定值大于T2,所以T3 只在T2 计时达到设定值并且T1 计时判断通过目标为行人后工作,从而通过T2、T3两个延时定时器将矿车和行人进行了区分。
系统在T3每次计时结束时都会查看传感器A4有无检测信号发出,如果有信号,则说明风门B侧有工人在等待风门B开启通过,在确保风门A关闭后将风门B开启;若A4无检测信号发出,则检测传感器A1是否有新信号发出,如果有,说明后续有其他目标要通过风门A,系统控制风门A持续开启,保证后续人员通过。
4 结束语
本文设计的基于PLC 的煤矿井下风门自动闭锁制系统在实际测试中,可以根据不同目标通过风门区域时所产生的不同脉宽的信号,实现对行人和矿车的智能识别,并采取不同的方式区别控制,系统的控制精度、稳定性、自动化程度都得到了提升,具有良好的经济效益和应用前景。
猜你喜欢
山东煤炭科技(2022年3期)2022-04-22
煤(2022年2期)2022-02-17
湖北农机化(2021年7期)2021-12-07
作文大王·低年级(2020年2期)2020-03-13
数学大王·低年级(2020年2期)2020-03-13
机械管理开发(2020年1期)2020-02-17
山东煤炭科技(2019年6期)2019-07-15
幽默大师(2019年5期)2019-05-14
汽车实用技术(2018年18期)2018-09-26
自动化仪表(2015年5期)2015-06-15