单兵火箭弹BTT 自抗扰控制器设计与仿真
2020-11-05 02:43董瑞超陈志华刘晓利杨艳娟
兵器装备工程学报 2020年10期
董瑞超,陈志华,刘晓利,杨艳娟
(1.南京理工大学 瞬态物理国家重点实验室, 南京 210094;2.南京理工大学 自动化学院, 南京 210094)
单兵武器体积小、重量轻、成本低,适应多兵种作战使用。当前,单兵火箭弹的制导化改造已经受到人们的广泛关注[1]。单兵火箭弹的弹体口径通常小于100 mm;在制导化改造中,从结构布局以及成本投入方面都有很大局限性。因此,本文提出火箭弹体采用两套舵机方案:差动进行滚转控制,同向偏转进行俯仰控制,从而实现倾斜转弯(BTT)控制[2]。目前,针对四套舵机实现BTT控制方式已经取得了丰富的研究成果,主要有动态逆控制[3]、滑模控制[4]和自抗扰控制[5-6]等控制。
采用BTT控制的导弹通常存在通道间的气动力、惯性、控制等耦合因素,因此过去的BTT控制器设计通常采用三通道控制方案(四套舵机),由偏航舵机实现协调控制(即侧滑角约束)。在本文中,弹体只有两套舵机,只能控制弹体的滚转与俯仰运动,缺乏偏航通道的协调控制作用。因此,在BTT控制器设计时,除了要解决通道解耦问题外,还要考虑对偏航通道的协调性能。本文建立了单兵火箭弹BTT数学模型,设计了自抗扰控制器,应用MATLAB仿真方法验证了控制系统的各项性能。
1 单兵火箭弹数学模型
单兵火箭弹采用两套舵机差动控制方式,其具体的气动布局如图1所示。
图1 两套舵机单兵火箭弹气动布局示意图
本文的导弹模型及相关参数、符号意义详见文献[7]。 滚转通道:
(1)
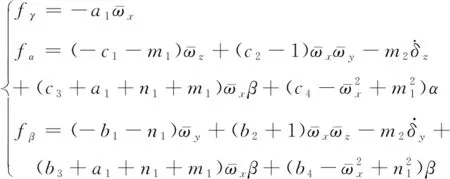
俯仰-偏航通道:
(2)
其中δy恒等与0,式中其余各参数定义如下:
b1=f1+b3,b4=b3n1-f2,b5=b3n2-f3
c1=d1+c3,c4=c3m1-d2,c5=c3m2-d3
由于单兵火箭弹采用两套舵机控制,实际的控制输入信号只有滚动通道舵机输入信号δx和俯仰通道舵机输入信号δz,偏航通道没有舵机控制,因此单兵火箭弹系统是一个欠驱动系统。通过分析火箭弹特征,给出单兵火箭弹控制系统的控制目标:
1) 控制器保证在侧滑角满足|β|≤3°的同时,系统快速、平稳地跟踪指令信号。
2) 在允许空域范围内,对弹体参数摄动以及弹体不确定性具有一定鲁棒性。
3) 能处理俯仰通道和偏航通道的强耦合干扰。
2 基于自抗扰的BTT控制器设计
2.1 自抗扰控制理论介绍
自抗扰控制器分为跟踪微分器、扩张状态观测器和非线性状态误差反馈控制律3部分组成[8-9],自抗扰控制器机构如图2所示。
图2 自抗扰控制器结构框图
跟踪微分器能够从被噪声污染的信号中合理提取微分信号。扩张状态控制器(ESO)是ADRC的核心部分,它实时观测对被控对象所受到的扰动,将估计的总扰动量补偿到控制器中,使非线性系统转变为线性积分串联系统。非线性反馈控制将跟踪微分器和扩张状态观测器的输出信号进行非线性组合,得到被控对象所需要的控制指令。自抗扰控制的非线性特性,可使系统无超调地快速跟踪控制指令,获得优异的控制效果。
2.2 滚转通道自抗扰控制器设计
由式(2)可知,滚转通道公式如下:
(3)
1) 跟踪微分器(TD)设计:
vγ1(k+1)=vγ1(k)+hvγ2(k)
vγ2(k+1)=vγ2(k)+hfhan(vγ1(k)-
γref(k),vγ2(k),rγ0,hγ0)
(4)
其中:fhan函数为最速综合函数[10];vγ1、vγ2为滚转通道跟踪-微分器的系统状态;rγ0、hγ0为其函数控制参量;γref为滚转通道的参考输入,通过设置合适的参数,可以实现vγ1快速无超调地跟踪γref,vγ2近似地跟踪γref的导数。
2) 扩张状态观测器(ESO)设计:
(5)


3) 非线性状态误差反馈控制律(NLSEF)设计:
(6)
根据跟踪-微分器和扩张状态观测器的输出,可以得到误差信号e1和误差微分信号e2、kp、ki、δ和b0为非线性组合参数。
2.3 俯仰通道自抗扰控制器设计
由式(1)和式(2)可得火箭弹系统二阶模型:
(7)
其中:
(8)
令
(9)
假设δy存在并不恒等与0,与滚转通道类似,根据式(4)~式(6)对三通道可分别设计三通道自抗扰控制器:

(10)

(11)
将δz作为控制量输入到俯仰通道,δx根据单独在滚转通道设计,δy恒等与0。
3 数字仿真实例
为验证所设计的两通道BTT控制器对两套舵机差动控制的单兵火箭弹的控制效果,在MATLAB/Simulink平台上对单兵火箭弹系统进行三通道联合仿真(不含舵机模型)。Simulink仿真系统如图3所示。
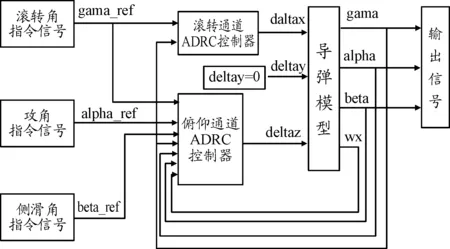
图3 单兵火箭弹控制仿真系统框图
3.1 仿真参数
本文所研究的单兵火箭弹来自实际弹体模型,其中相应参数均已知,弹体气动力学参数由理论计算得到。在实际飞行过程中,弹体数学模型的气动参数会随高度和马赫数变化而变化。标称点1选择在高度500 m,弹体速度为200 m/s时,为了验证控制系统的鲁棒性,选择气动参数摄动量在±50% 的两点作为参数向上摄动点2和参数向下摄动点3。标称点1的弹体气动力参数如表1所示。
滚转通道控制器参数如表2所示。
俯仰通道控制器参数如表3所示。

表1 标称点1处的参数值
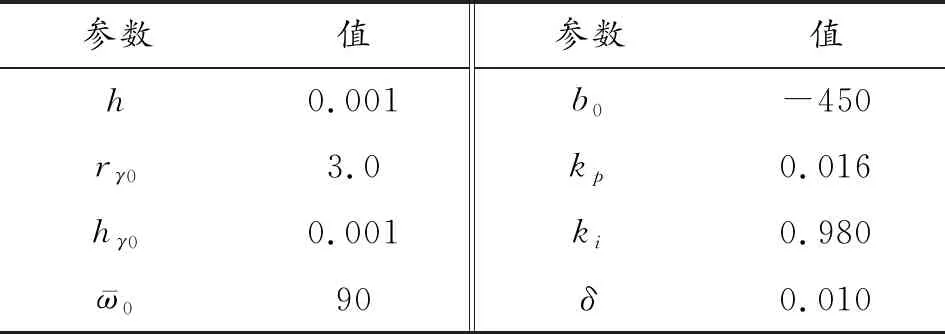
表2 滚转通道自抗扰控制器参数
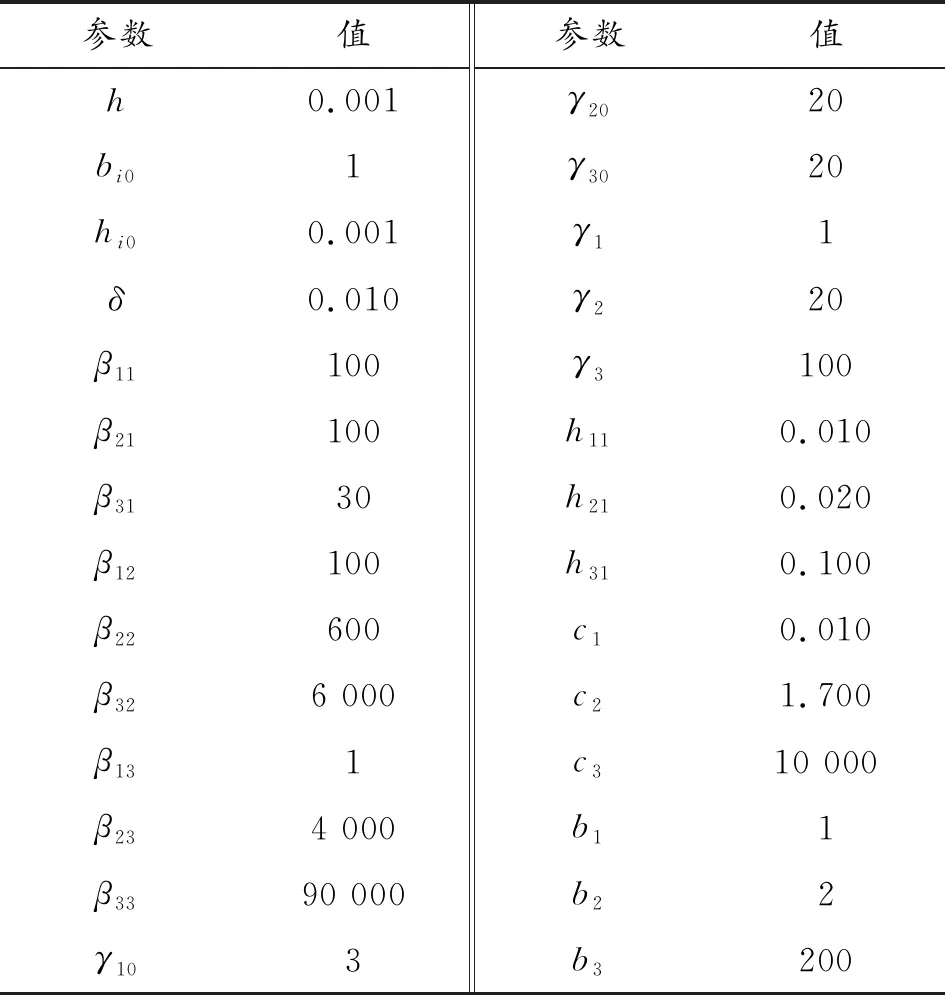
表3 俯仰通道自抗扰控制器参数
3.2 仿真结果
仿真参考输入指令信号如表4所示。结果如图4~图6所示:
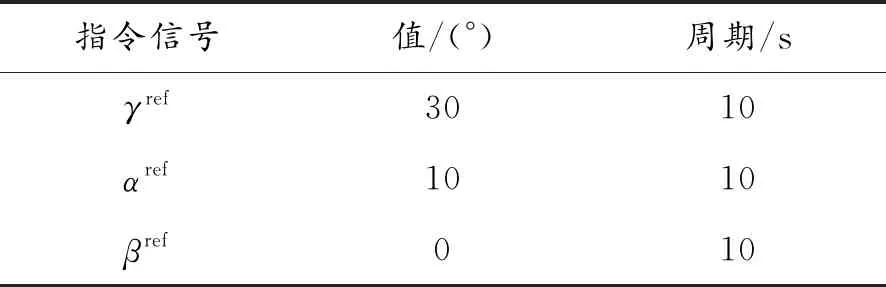
表4 参考输入指令信号
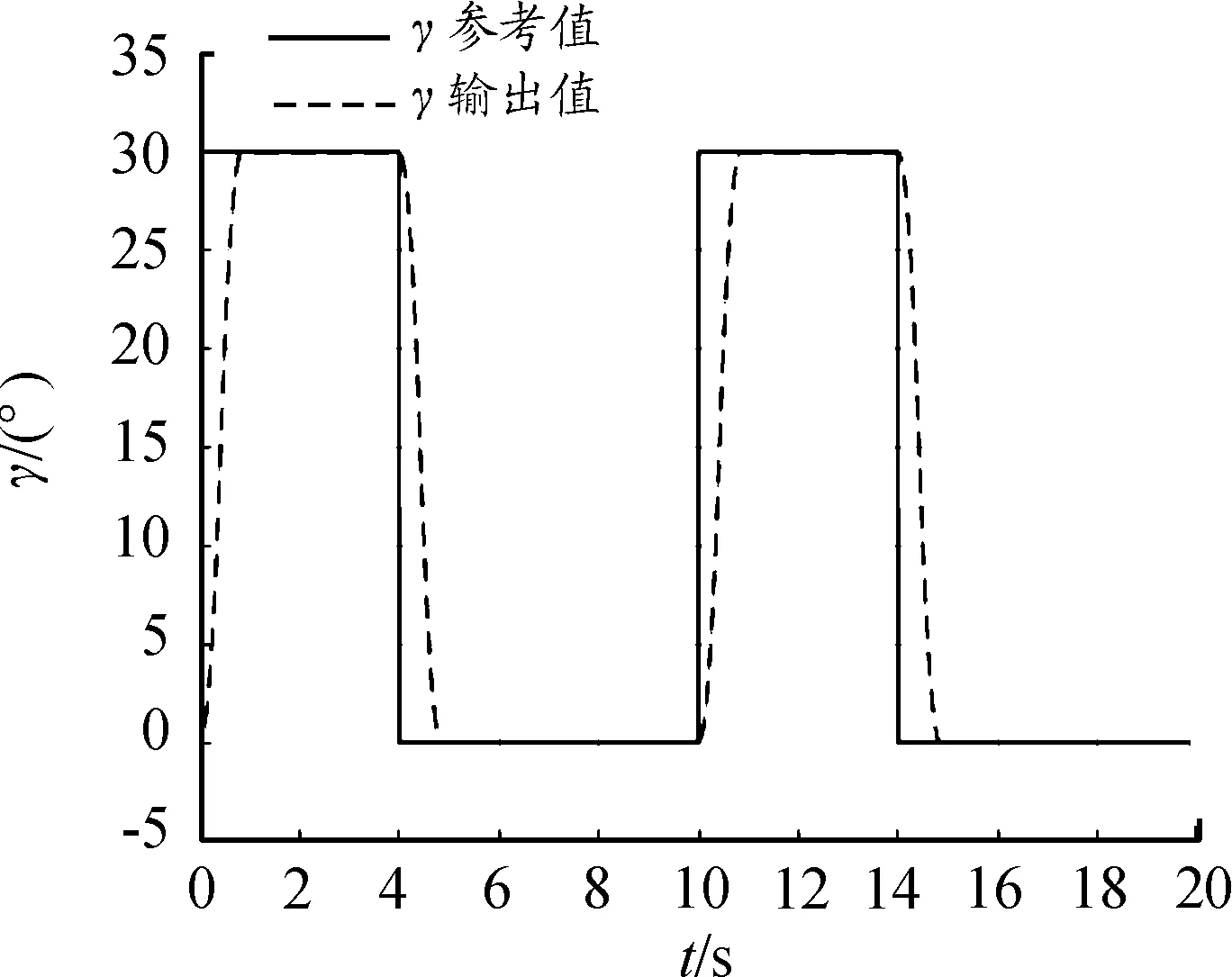
图4 方波信号时滚转角跟踪曲线
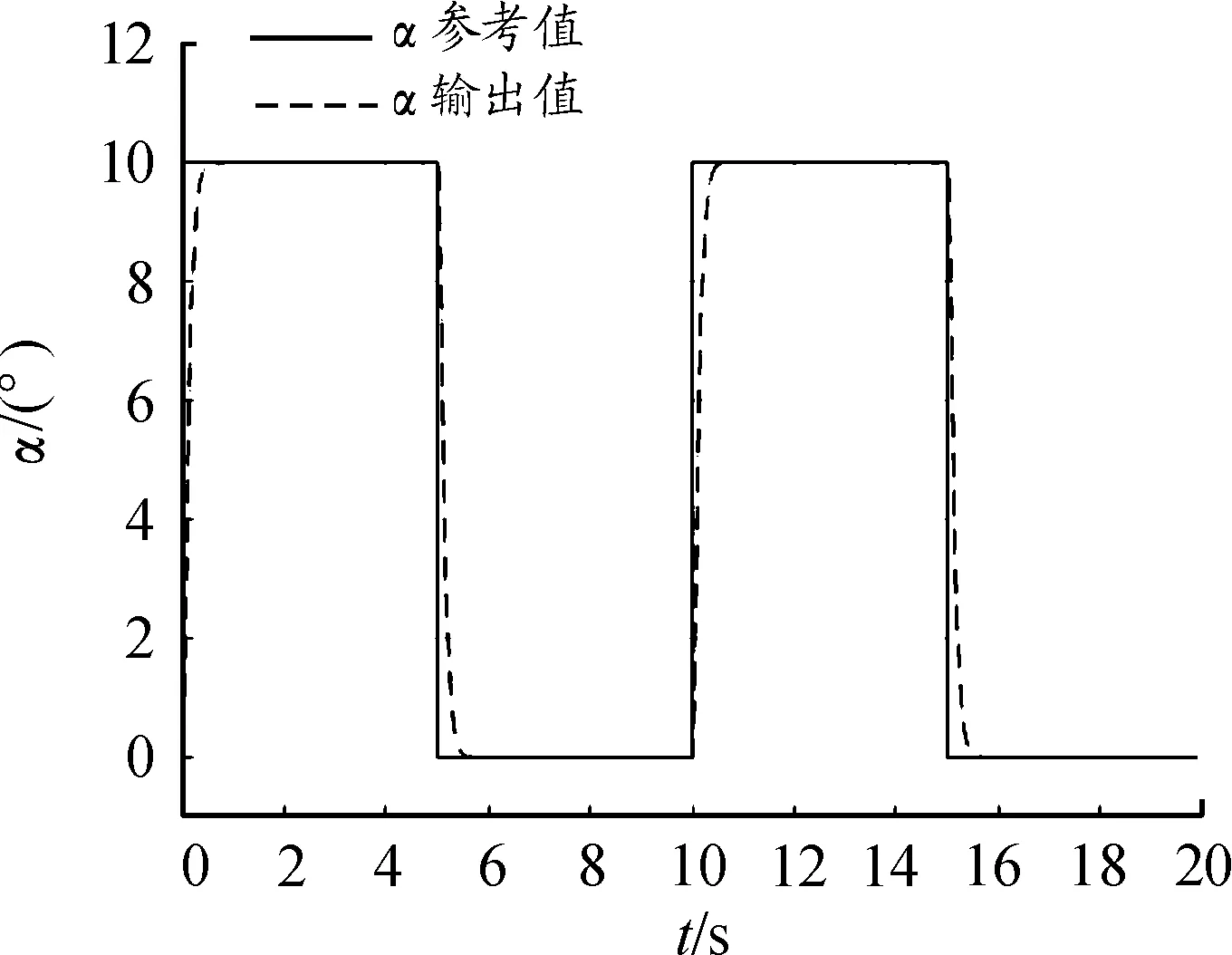
图5 方波信号时攻角跟踪曲线
由图4~图6可以看出:当输入信号为方波信号时,滚转角的输出曲线与攻角的输出曲线都可以稳定、迅速和无超调地跟踪指令信号,并且偏航角输出|β|<1°满足|β|<3°的标准。由此,可知设计的自抗扰控制满足在标称点1出的性能要求。
1) 解耦性分析。通道间的耦合问题是单兵火箭弹控制系统设计的一个难题。常见的导弹气动布局多采用四套舵机控制,即俯仰舵机和偏航舵机控制。为验证本文两套舵机控制与常规四套舵机控制的区别,在已有火箭弹参数和自抗扰控制器的基础上,添加偏航舵机[7],并进行仿真比较,结果如图7~图9所示。
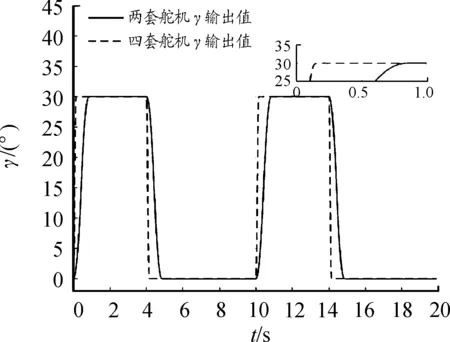
图7 两套舵机和四套舵机滚转角输出值曲线
输入信号为方波信号时,由图7可以看出采用四套舵机控制的滚转角输出曲线的响应时间比在采用两套舵机控制的滚转角输出曲线的响应时间短;由图8可以看出在俯仰通道控制上,采用两套舵机控制和采用四套舵机控制的相应时间是一样的,两套舵机控制的攻角输出曲线在4 s和14 s时几乎不被耦合干扰影响,但是4套舵机控制的攻角输出曲线在4 s和14 s因耦合干扰产生了最大正峰值10.21°、最大负峰值9.8°的耦合干扰;从图9可以看出:4套舵机控制对偏航通道的解耦效果要比两套舵机控制的解耦效果好,2种控制方式的偏航通道均满足设计要求。综上所述,虽然四套舵机控制方式在控制效果上比两套舵机控制要好,但是两套舵机控制也能很好地满足设计要求,并且采用两套舵机控制方式要比四套舵机控制方式在弹内布局上面要跟加灵活,更能满足单兵火箭弹这一类小口径弹体、低成本火箭弹的设计需求。
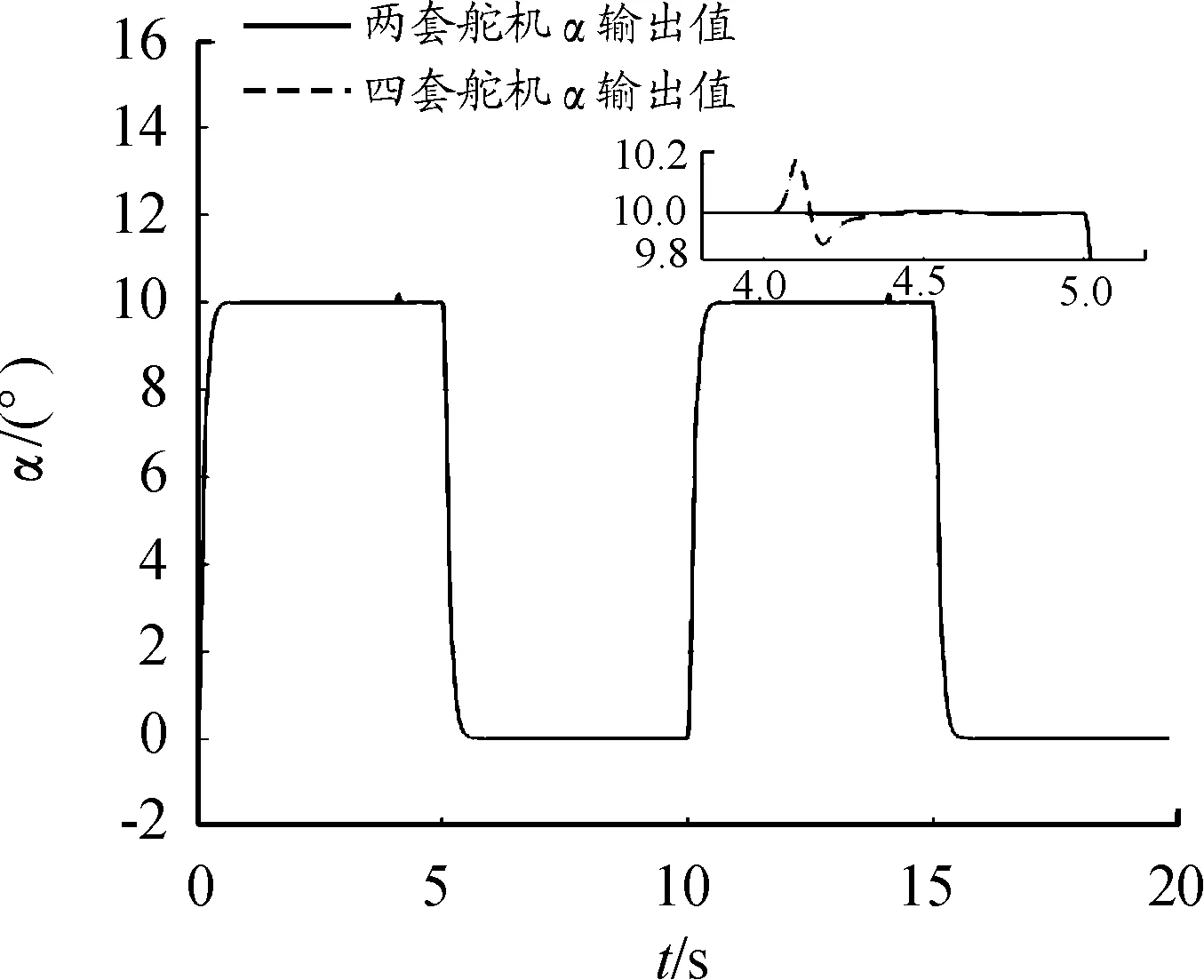
图8 两套舵机和四套舵机俯仰角输出值曲线

图9 两套舵机和四套舵机偏航角输出值曲线
2) 鲁棒性和抗干扰分析。对控制系统进行标称点1、向上摄动点2和向下摄动点3的仿真实验,以验证控制系统的鲁棒性。结果如图10~图12所示。
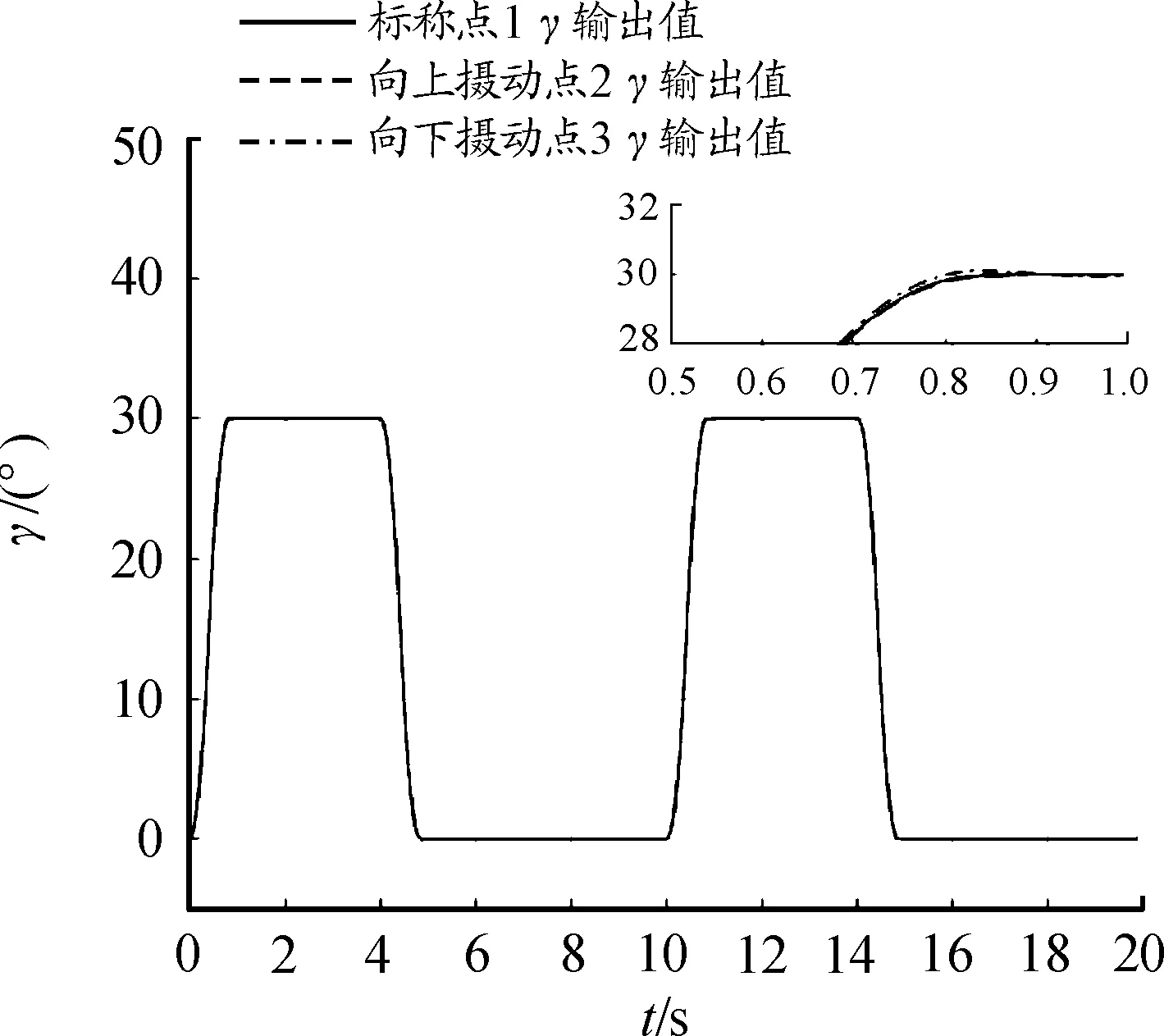
图10 滚转通道摄动点输出值曲线
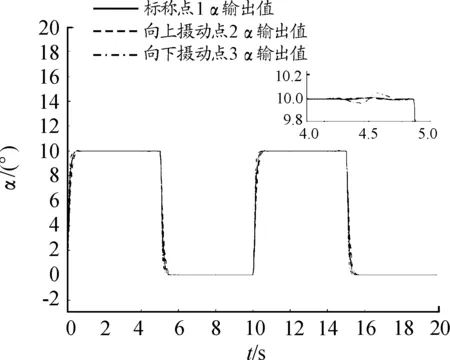
图11 俯仰通道摄动点输出值曲线
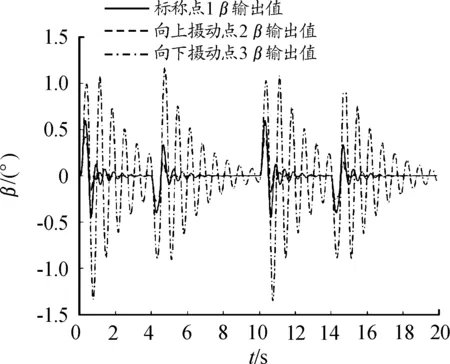
图12 偏航通道摄动点输出值曲线
输入信号为方波信号时,由图10~图12可以看出,当气动参数摄动±50%时,设计的自抗扰控制器均能满足控制要求,其中控制器对标称点1和向上摄动点2的控制效果无明显差别;向下摄动点3处,控制器在滚转通道和俯仰通道均产生了微小地超调,但最终都会迅速地跟踪指令信号,由图12可见,参数向下摄动对于偏航通道影响明显,但是也在性能要求内。由此可知,在一定范围内,设计的自抗扰控制器具有一定的鲁棒性和抗干扰能力。
给俯仰通道信号添加功率为0.000 1,周期为1 ms的白噪声,攻角输出曲线如图13所示。
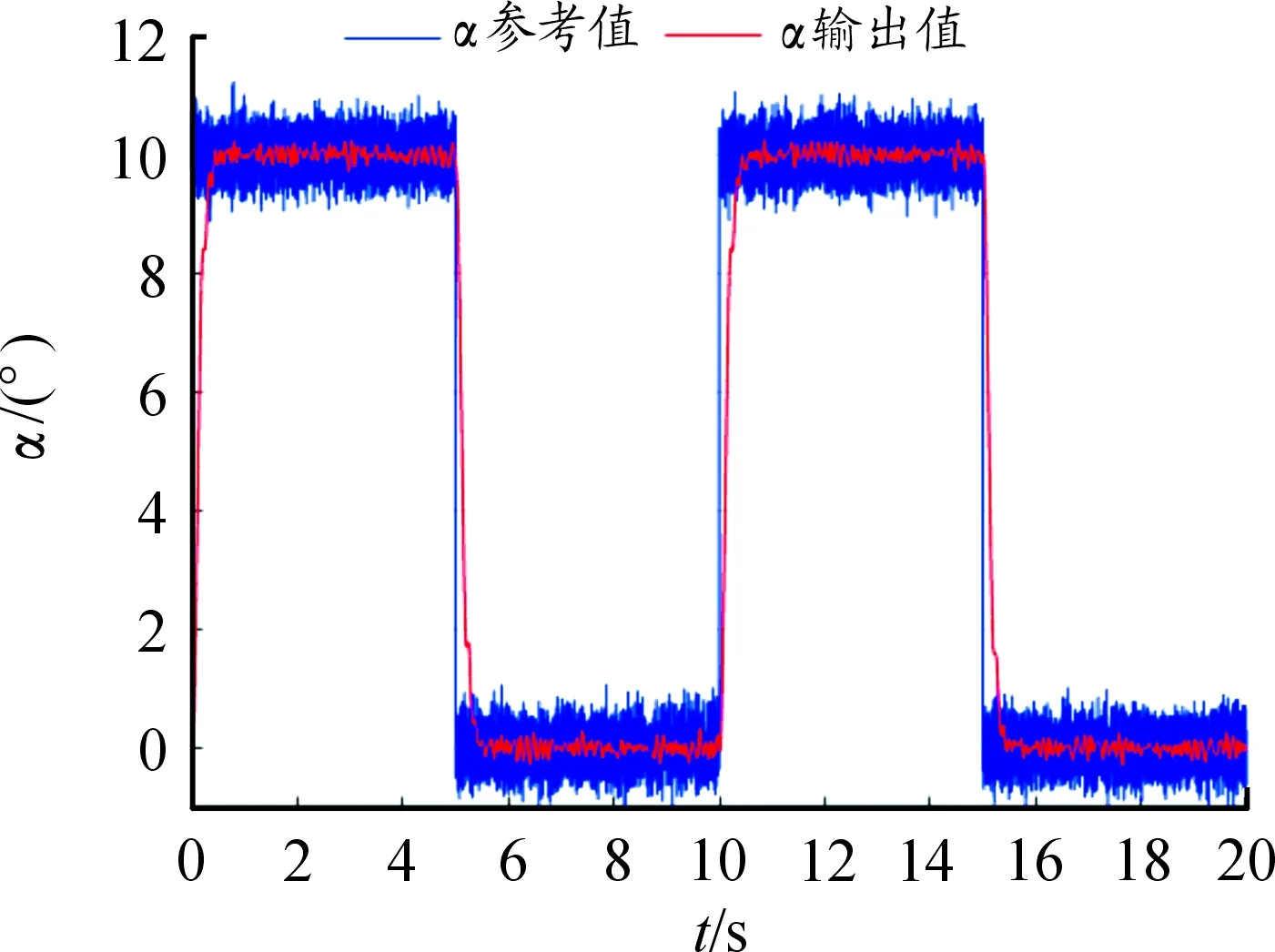
图13 俯仰通道指令加白噪声时的仿真曲线
由图13的仿真结果可见,攻角输出存在抖动,但是基本可以跟随指令,满足设计要求。
4 结论
针对两套舵机控制的单兵火箭弹控制系统,本文设计了多输入多输出非线性耦合模型,采用跟踪-微分器跟踪指令信号和指令信号的微分信号,采用扩张状态观测器观测火箭弹系统状态以及不确定项,由非线性状态误差反馈控制律对误差信号和误差微分信号进行非线性组合设计自抗扰控制器,以实现BTT控制。仿真结构表明:所设计的自抗扰控制器可以满足火箭弹控制系统的性能要求,并且具有一定的鲁棒性和对通道间强耦合干扰的解耦能力。本文研究的两套舵机控制方式,因其布局灵活、占空间小以及成本低的特点,在未来小口径火箭弹控制方面具有很好的工程应用前景。
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10
装备环境工程(2022年6期)2022-07-09
北京航空航天大学学报(2022年5期)2022-06-06
兵器装备工程学报(2022年4期)2022-05-09
黑龙江大学自然科学学报(2022年1期)2022-03-29
爆炸与冲击(2022年2期)2022-03-17
兵工学报(2021年6期)2021-07-29
商情(2019年9期)2019-04-01
农家科技下旬刊(2017年8期)2017-11-13
农家科技(2017年7期)2017-08-15