集排风送式玉米分层追肥机设计与试验
2020-11-25 03:53何亚凯杨学军翟长远赵学观窦汉杰
农业机械学报 2020年11期
何亚凯 杨学军 翟长远 赵学观 窦汉杰 王 秀
(1.北京农业智能装备技术研究中心, 北京 100097; 2.国家农业智能装备工程技术研究中心, 北京 100097;3.中国农业机械化科学研究院, 北京 100083; 4.西北农林科技大学机械与电子工程学院, 杨凌 712100)
0 引言
追肥作业是玉米生产中的重要环节,有效地追肥管理能够提高作物产量。目前,国内玉米生产过程中追肥环节仍以人工或简易机具作业为主,其劳动强度大、作业效率低,不利于大面积作业,且施肥不均匀,影响后期植株生长及作物产量[1-5]。
机械化追肥能够有效降低玉米追肥作业劳动强度,提高施肥效率,提升综合经济效益[6-7]。目前,国内玉米追肥机械研究还处于起步阶段,研制的追肥机械以重力直排技术施肥为主,成熟产品较少。国内一些学者已对排肥、输送和施肥技术进行了相关研究。胡红[3]设计了一种玉米定点扎穴追肥机,该机主要由玉米植株探测装置、外槽轮间隔排肥和滑轨连杆扎穴施肥装置组成,能够根据玉米植株位置实现定点扎穴施肥,提高了肥料的利用率,但追肥效率较低;郑媛媛[8]设计了一款电动玉米中耕追肥机,采用常用的外槽轮式排肥器进行排肥,利用单条开沟器进行开沟施肥作业,能够实现玉米行间机械化追肥作业,但追肥效率有待提高;气力辅助施肥能够有效增加机具作业幅宽,提高追肥效率,齐兴源等[9]设计了一种稻田气力式变量施肥机,并进行相关试验,可实现稻田侧深施肥量在40~200 kg/hm2范围内的调节;赵金辉等[10]通过对气流输送系统进行分析研究,设计了一种气流输送式苔麸排种装置,排种性能指标满足标准要求;左兴健等[11]利用数学建模分析和试验研究对关键施肥部件进行优化,设计开发了一种风送式水稻侧深精准施肥样机;雷小龙等[12]基于颗粒化肥的机械物理特性和施肥量要求,设计了一种颗粒化肥螺旋组合式集中供肥装置;文献[13-14]利用高压气流输送原理,设计了气流输送式小麦免耕播种机,提高了小麦播种的效率和均匀性;文献[15-17]研究了玉米种植的不同施肥方式,分层施肥能够满足不同生育期的养分需求、提高肥料利用效率、增加作物产量,对集排和风送式玉米追肥机械的研究相对较少,追肥机械作业效率不高。
为了改善我国玉米追肥机械现状,提高我国玉米机械化追肥作业效率,本文针对黄淮海平原地区,采用集中排肥和气流输肥的方式,以最高作业速度7.2 km/h为目标,设计一种集排风送式玉米分层追肥机,以期实现多行宽幅分层快速施肥作业。

图1 追肥机结构简图Fig.1 Structure diagram of fertilization prototype1.排肥箱a 2.排肥箱b 3.排肥风机b 4.控制系统 5.分流器 6.排肥装置b 7.供料器 8.施肥固定架 9.机架 10.深层施肥铲 11.浅层施肥铲 12.仿形机构 13.行走轮 14.浅层输肥管 15.深层输肥管
1 结构与工作原理
1.1 结构及技术参数
集排风送式玉米分层追肥机结构示意图如图1所示,主要由排肥箱a和b、排肥风机a和b、施肥控制系统、分流器a和b、排肥装置a和b、供料器、施肥固定架、机架、深层施肥铲、浅层施肥铲、仿形机构、行走轮、浅层输肥管和深层输肥管等部件组成,其中深浅层施肥分别由施肥原理相同的排肥装置a和b来单独控制。
追肥机主要技术参数如表1所示。
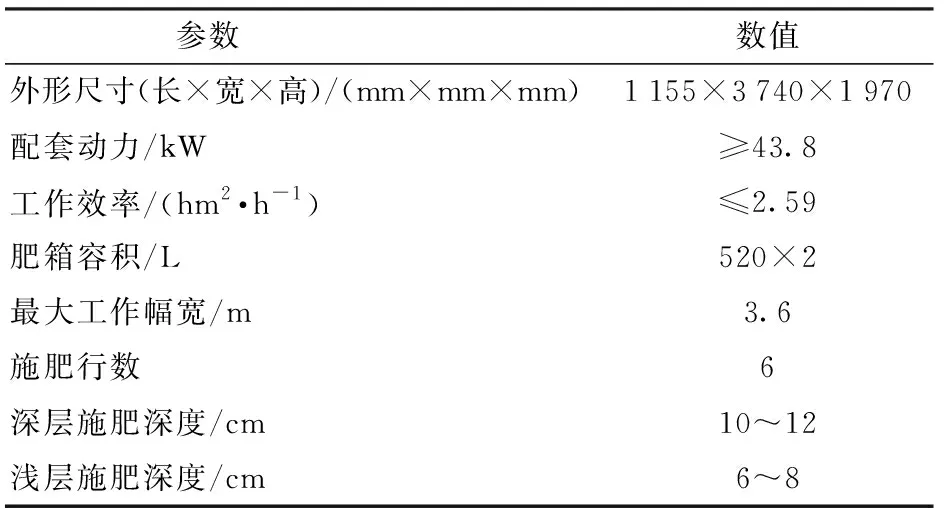
表1 追肥机主要技术参数Tab.1 Main technical parameters of fertilizer applicator
1.2 工作原理

图2 玉米分层施肥作业原理图Fig.2 Schematic of layered fertilization for corn1.玉米植株 2.土壤 3.深层肥料 4.浅层肥料
该追肥机械采用43.8 kW以上拖拉机作为工作动力,运用电动多行集排、气流输送方式进行施肥作业。施肥工作开始前,开启施肥控制系统,根据作业要求设定作业幅宽、目标追肥量、深浅层肥量等相关参数,打开风机使输肥系统产生稳定的气流,保证落入文丘里管内的肥料能够被顺畅输送至施肥机构;施肥工作开始时,排肥电机驱动排肥轮进行排肥,排肥电机转速可自适应机械工作速度变化,实时进行排肥量的调节,排出的肥料落入文丘里供料器落肥口处,文丘里供料器进料口在气流作用下产生稳定的负压,能够使肥料顺利吸入输肥管道内,肥料在输肥管道压差作用下随气流运动输送至施肥机构处,落入施肥沟槽内,完成追肥作业。追肥机械深浅层施肥是通过两套施肥装置完成,深层追肥作业为开沟条施,在玉米植株侧边p1(10~15 cm)处划出一条深度h1(10~12 cm)的沟槽进行深施肥,为了减少追肥机械施肥时土壤对施肥铲产生的阻力,降低拖拉机动力消耗,浅层追肥作业为扎土穴施,与深施肥同侧,在与玉米植株距离p2为15~18 cm、扎穴深度h2为6~8 cm处进行浅施肥,其施肥深浅层作业原理示意图如图2所示,其中D为玉米播种行间距。
2 关键部件设计
2.1 多行集中排肥装置设计
排肥装置是施肥机关键部件之一,排肥性能决定了追肥机的施肥质量和实用性。本文所设计的排肥装置采用6行排肥轮集中排肥的结构形式,结构集成度较高,利用一个排肥电机进行多行排肥量的控制,且每个施肥铲的施肥量分别来自对应排肥轮所排出肥量,排肥一致性较好;排肥装置结构如图3所示,主要包括排肥壳体、肥料隔板、排肥槽(由排肥上弧板和下弧板构成)、排肥轮、排肥轴、张紧机构、排肥间隔套和排肥电机等,肥料隔板安装在肥箱和排肥轴之间,能够有效减少肥料对排肥轴的下压力,降低排肥电机的功耗,排肥下弧板为铰接机构(铰接点O),能够有效降低排肥过程中排肥轮与排肥槽的卡肥现象,提高排肥稳定性能。
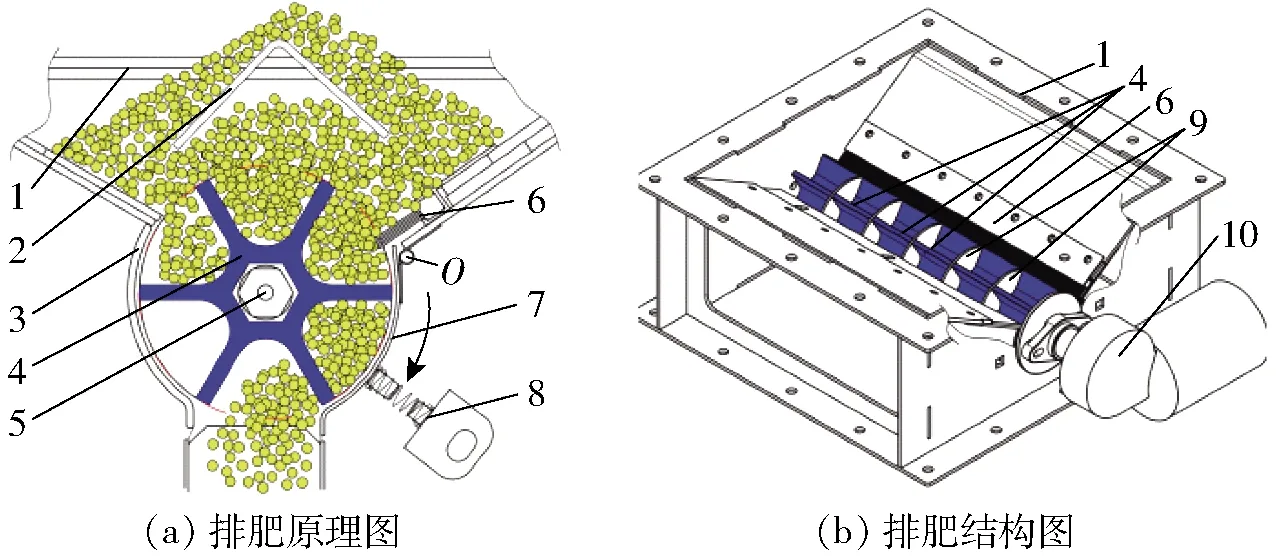
图3 排肥装置工作原理与结构图Fig.3 Schematic and structure of fertilizer discharge device1.排肥壳体 2.肥料隔板 3.排肥上弧板 4.排肥轮 5.排肥轴 6.毛刷 7.排肥下弧板 8.张紧机构 9.排肥间隔套 10.排肥电机
排肥轮是排肥机构中主要工作部件,目前常用的排肥轮结构形式较多,由于直齿外槽式排肥轮结构简单,排肥量可控度高,工作性能稳定,本排肥机构采用直齿外槽式排肥轮,其排肥过程示意图如图3a所示,根据外槽轮排种原理[18]可知,该外槽轮排肥器单个排肥轮每转排肥量计算式为
(1)
式中q0——单个槽轮每转排肥量,g/r
d——外槽轮外径,mm
L——单个槽轮工作长度,mm
γ——肥料容重,g/mm3
φ0——凹槽内肥料填充系数
fs——单个槽轮凹槽截面积,mm2
ω——凹槽节距,mm
z——槽轮槽数
λ——带动层特性系数,mm
由式(1)可知,影响排肥量的主要参数有凹槽截面积、槽轮工作长度和填充系数,其中填充系数与转速负相关[19]。当排肥量一定时,排肥轮凹槽截面积较大,则排肥轮工作长度和转速要求变小,排肥量均匀性相对较差;排肥轮凹槽截面积较小,则排肥轮转速和工作长度要求变大,肥料填充系数下降,排肥准确性相对降低。根据尿素颗粒尺寸以及追肥量等农艺要求,结合排肥装置结构设计,确定排肥轮结构参数为排肥轮外径68 mm,一周凹槽数6个,槽轮有效排肥长度14 mm,槽深21.5 mm,外槽沿槽厚4 mm,凹槽半径8.5 mm。
2.2 风送输肥装置设计
2.2.1风送输肥原理
风力输送是利用一定速度和压力的气流进行物料远距离输送,其动力来源为具有一定能量的气流,可以实现柔性结构布局,简化施肥机械复杂的结构布置,气流风送输肥工作原理如图4所示。风机运转后能够产生稳定的高压气流,气流的运动在文丘里供料器进料口处产生负压,以促进肥料顺利进入输肥管道,气流在管道内作为肥料的载体,快速输送肥料至施肥位置处。

图4 气流输肥技术工作原理图Fig.4 Schematic of pneumatic conveying fertilizer technology1.输肥风机 2.文丘里供料器 3.颗粒肥料 4.输肥软管
2.2.2风送输肥系统参数确定
气流速度是风送输肥系统的关键参数,直接影响肥料颗粒在管道中的运动状态。气流速度较小时,肥料颗粒则渐渐停滞在水平输肥管的管底,导致输肥管道堵塞;气流速度较大时,肥料能够在管道内均匀散开、顺利输送,若速度过高会浪费能量,还会造成施肥口处肥料颗粒速度过大,影响肥料在田间施肥过程中的分布效果。气流输送速度可根据气力输送理论公式进行计算
(2)
式中vs——输肥管入口输送风速,m/s
kp——肥料颗粒度系数(一般为16~20,颗粒直径较小时取小值)
ρp——肥料颗粒密度,kg/m3
ks——肥料颗粒特性系数,一般为2×10-5~5×10-5
l——输送肥料管道长度,m
由于玉米追肥多数为尿素化肥,肥料颗粒直径一般不超过4 mm,则选取颗粒度系数为16,肥料颗粒密度为1 335 kg/m3,肥料输送管道长度最大为2 m,管道长度对风速影响可忽略[11,20-21],则由式(2)可知输肥风速vs为18.48 m/s,考虑实际施肥作业环境的复杂性以及管道接口处的密封性等因素影响,为确保能够顺利输送肥料,实际风速取为1.1×18.48 m/s=20.33 m/s。
气流输送浓度(也称料气比)[21]为单位时间内输送肥料的质量与通过管道气流质量的比值,输送浓度越大,所需空气质量将会减少,输送所需功率也会降低,但易造成肥料输送堵塞,输送浓度过低时,输肥效率将会大大降低,影响施肥工作效率。通过查阅相关资料[22],可知常用物料输送浓度的经验值,为提高肥料输送过程的通畅性,结合经验值,选定气流输送浓度μ为1.2。气流输送浓度表达式为
(3)

(4)
式中Gp——输送管道内肥料质量流量,kg/s
Gs——输送管道内空气质量流量,kg/s
j——输肥管个数,取6
ρs——空气密度,kg/m3
d0——每一分行输肥管道直径,m
根据式(1)~(4)可知,输肥管道直径为
(5)
输送流量为
(6)
根据玉米追肥农艺要求,玉米追肥最大量一般为360 kg/hm2,为增大风送系统适应范围,机械前进速度设定为9 km/h,施肥口共12个(深浅层各6个),则可知追肥作业中单位时间内总排肥量不超过0.32 kg/s,单层排肥总量Gp不超过0.16 kg/s,由式(5)可知输肥管直径为32.8 mm;输送流量要求为371 m3/h,则根据流量和风速要求,本文选取风机型号为ZFL133/190BN-S1150,工作电压为24 V,额定功率为160 W调速风机,额定转速为1 600 r/min。
2.2.3供料器
供料器是风送输肥系统中关键部件之一,它的作用是把肥料喂入输肥管道,并且能够确保肥料在管道内顺利输送[21-24]。本文采用文丘里原理进行供料器的结构设计,文丘里供料器结构如图5所示。

图5 文丘里供料器结构示意图Fig.5 Structure of Venturi feeding fertilizer1.入口区 2.收缩区 3.入料区 4.喉管区 5.气流出口区
气流由文丘里管进口流入,经过收缩区进行加速,流至喉管区时速度达到最大,此时入料口处于负压状态,使肥料顺利落入输肥管道并快速输送至扩散区,避免了肥料的拥堵。其中,气流入口直径d1和出口直径d3与输肥管道直径d0相等(即d1=d3=d0=32.8 mm),收缩角α为22°,扩散角β为9°,喉部直径过小则要求气流入口压力大,气流输送阻力增加,喉部直径太大,喉部气流增速和入料口负压效果不显著,不利于输肥,为保证肥料在管喉部有足够空间,取喉部直径d2为23 mm。
结合供料器设计参数进行参数化建模,并利用Fluent软件进行流体仿真分析,其仿真结果如图6所示。从仿真图中可以看出,该供料器内部管道无湍流现象,气流平稳,当入口风速为20 m/s时,出口风速平均值为21.74 m/s;物料入口处风速平均值为1.14 m/s,气料混合口风速平均值为8.24 m/s,方向流向管道内,由物料入口处至气料混合口处负压越来越大,有利于肥料输送,验证了文丘里供料器结构设计的合理性。

图6 供料器管道截面速度分布图Fig.6 Velocity distribution diagram of feeding fertilizer cross section1.气流入口 2.物料入口 3.气料混合口 4.气流出口
2.2.4分流器和风送输肥装置
分流器在风送输肥系统中具有重要作用,该机构能够有效把风机出风口气流转化为6行输肥气流,其结构简图如图7a所示。为确保各行输肥气流的一致性,针对分流器结构进行优化设计并利用CFD(Computational fluid dynamics)进行气流运动仿真分析,当入口压强为360 Pa时,其仿真结果如图7b所示,从仿真图中分析可知,该分流器内部气流较为平稳、无涡流现象,6行出风口速度均值为20.03 m/s,变异系数为0.32%,分流一致性较好,验证了分流器结构设计的合理性。
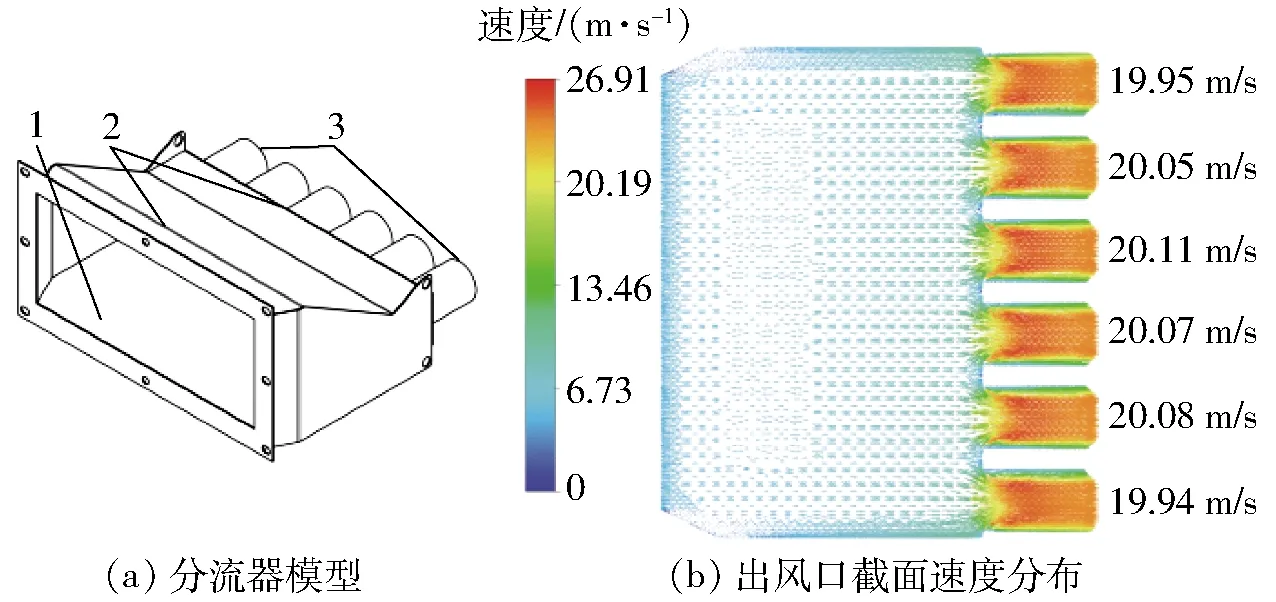
图7 分流器结构和风速仿真图Fig.7 Structure and airflow simulation of airflow allotter1.进风口 2.分流器壳体 3.出风口
本文利用气流正压输送技术设计了两套6行风送输肥装置(如图8所示),分别用于深浅层施肥。该风送输肥装置主要由输肥风机、分流器、过渡连接管、文丘里供料器、输肥软管和施肥固定架组成,输肥风机安装在输肥系统气流的起始端,风机产生的气体经过分流器后均匀分成6路气流,每路气流分别对应一条输肥管道,实现各路输肥和施肥互不干扰,确保输肥的一致性和稳定性。
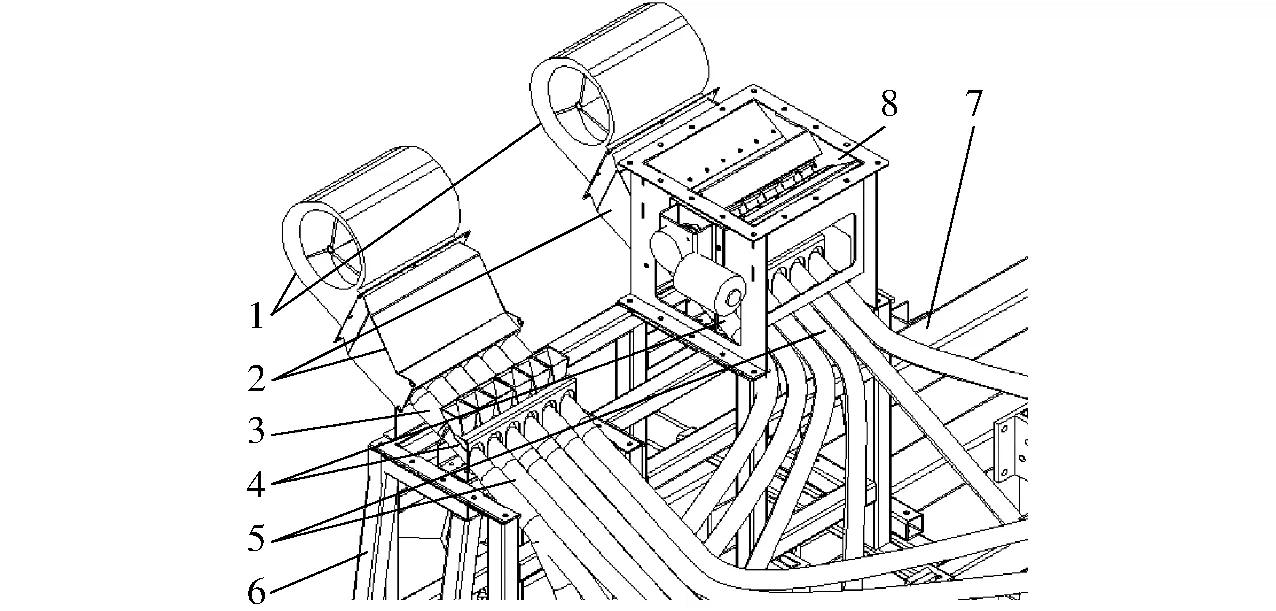
图8 输肥装置结构简图Fig.8 Structure of pneumatic conveying fertilizer device1.输肥风机 2.分流器 3.过渡连接管 4.文丘里供料器 5.输肥软管 6.施肥固定架 7.施肥装置机架 8.排肥机构
2.3 深、浅层施肥铲
深层施肥铲选用河北省农哈哈公司生产的开沟施肥铲,其结构简图如图9所示,主要包括主梁、圆柱滚轮、施肥管、开沟刀头和开沟铲翼,能够较好地完成深层开沟施肥作业。浅层施肥铲选用河北省临西县众一精密铸造厂生产的扎穴施肥器[25],其结构示意图如图10所示,主要由主梁、施肥管、星形齿盘a、星形齿盘b和齿盘转轴等组成,能够实现A点处扎穴齿闭合接肥,B点处扎穴齿张开施肥过程;主梁上方为排气口,用于排出过量气流,减小出肥口肥料速度,降低肥料与扎穴齿间的冲击碰撞,以避免出现弹跳溢出现象。

图9 深层施肥铲结构示意图Fig.9 Structure of deep fertilization colter1.主梁 2.圆柱滚轮 3.施肥管 4.开沟刀头 5.开沟铲翼

图10 浅层施肥铲结构示意图Fig.10 Structure of shallow fertilization rabbler1.主梁 2.施肥管 3.星形齿盘a 4.星形齿盘b 5.齿盘转轴
2.4 施肥控制系统设计
2.4.1总体设计
控制系统主要用于施肥作业状态的控制以及施肥作业肥量变化的自动调节。控制系统主要包括GPS车速模块、风机、深浅层排肥电机、电机驱动器、编码器、排肥控制单元(ECU)和人机交互单元。控制系统根据作业信息的传输与处理等划分为信息输入(包括风机转速、排肥电机转速和机具行走速度)、信息处理(包括控制单元和人机交互单元)和信息输出(包括风机转速和排肥电机转速),系统框图如图11所示。该控制系统采用TTC32作为控制核心,利用CODESYS进行程序开发,通过CAN总线进行信息传输,实现硬件之间的运行与融合。
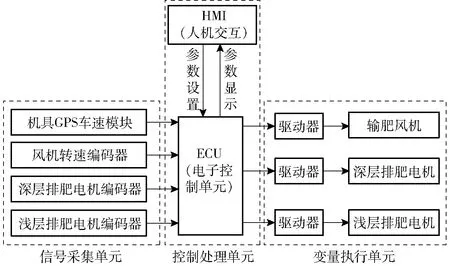
图11 追肥机控制系统总体结构框图Fig.11 Block diagram of control system for fertilizer applicator
施肥作业时,GPS车速模块能够实时获取当前车速,TTC控制器根据协议读取当前车速和排肥电机实际转速,基于控制器内部设定程序计算出排肥电机目标转速,进行排肥电机实际转速与目标转速差值比较与处理,利用PID方法对电机实际转速进行调控,确保排肥电机转速调节的快速稳定,实现排肥电机转速的实时控制,完成施肥量随前进速度变化的自适应调节。
2.4.2车载控制端软件设计
基于VS2012软件开发平台,采用Visual C++语言设计了车载计算机人机交互界面(如图12所示),包括串口通讯参数设置、施肥参数设置和作业状态信息监测,车载计算机经过串口USB/CAN 转换器连接至CAN 网络,与控制单元(TTC32)进行施肥现场作业数据信息交换。该界面能够根据不同施肥作业要求对施肥作业参数进行更改,参数更改简便,并能够实时有效地读取机具当前作业状态信息(深浅层施肥量、当前车速、地块位置等),增加了施肥机具作业的灵活性和适应性。

图12 车载端人机交互软件界面Fig.12 Interface of human-machine interaction
为了获取深浅层排肥电机目标转速,在软件界面(图12)输入相对应参数值,排肥控制单元读取输入相应数值信息后进行计算可得深浅层排肥电机目标转速为
(7)
式中m——施肥行数,取6
q——单个排肥轮每转排肥实测量,取28 g/r
np1——深层排肥装置排肥电机转速,r/min
np2——浅层排肥装置排肥电机转速,r/min
Qp1——深层目标施肥量,kg/hm2
Qp2——浅层目标施肥量,kg/hm2
v——机具前进工作速度,m/s
B——机具工作幅宽,取3.6 m
3 性能试验
3.1 试验方法
为了检验追肥样机施肥性能,参照NY/T 1003—2006《施肥机械质量评价技术规范》、JB/T 7864—2013《中耕追肥机》和GB/T 20346.2—2006《施肥机械 试验方法 第2部分:行间施肥机》等相关试验方法,采用尿素颗粒化肥,颗粒直径为1.0~3.5 mm,对风送追肥机进行室内和田间试验。
3.2 试验结果与分析
3.2.1排肥量一致性试验
本文设计的风送追肥机可同时进行多行施肥,各行之间排肥一致性的测量能够反映各行之间排肥量的差异性,间接反映出田间施肥的均匀性,为减少各施肥口排肥量的差异引起施肥不均的问题,进行排肥机构排肥一致性试验。排肥一致性试验为室内试验,设计作业速度条件下,排肥电机转速一般不超过38 r/min,采用施肥系统软件进行车速设置,实现排肥速度为低、中、高3个等级状态,每个速度下进行3次重复试验,试验时间为1 min,试验中把6个施肥口从左到右分别进行编号并进行肥量称量统计,试验数据统计如表2所示。
由表2可知,相同转速下,深、浅层之间排肥量差异较小,各行之间施肥口排肥量一致性较好,排肥量比较均匀;试验速度范围内,随着排肥转速的增加,各行之间排肥量变异系数有所降低,最大变异系数为2.64%,排肥量比较稳定。
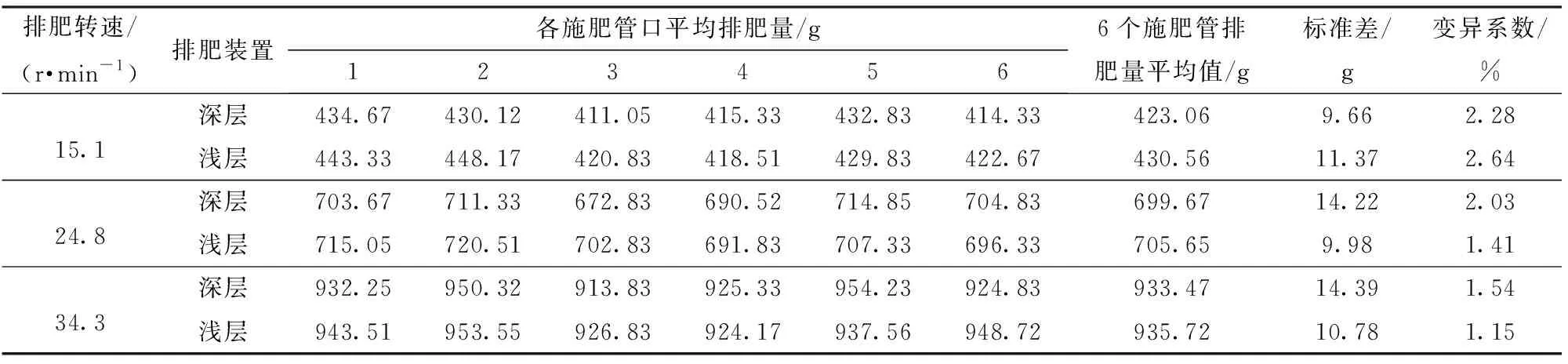
表2 各行施肥管口排肥量一致性试验结果Tab.2 Results of fertilizer quantity consistency among each row
3.2.2施肥量准确率试验
施肥量准确率能够反映追肥机械田间追肥作业的稳定性能,是田间追肥作业各区域追肥一致性的保证。为检验追肥样机施肥均匀性能,2019年7月中旬于河北省辛集市马兰农场进行田间试验,试验田块总面积为6 000 m2,前期已采用导航拖拉机进行玉米播种,播种行距为60 cm,追肥样机为北京农业智能装备技术研究中心研制的2FQS-6型玉米分层追肥机,田间作业试验如图13所示。

图13 施肥准确率试验现场Fig.13 Experimental scene of fertilization quantity accuracy
试验过程中追肥样机在施肥口进行套袋测肥,追肥作业在低、中、高3种速度下进行,每种速度下试验前进100 m测量一组数据,并进行3次重复试验,施肥量准确率为
(8)

(9)
式中Wa——施肥量准确率,%
Qr——设定施肥量,kg/hm2
qr1——试验距离理论施肥量,g
qr2——试验距离实际施肥量,g
Sl——施肥准确率试验距离,取100 m
试验数据统计结果如表3所示。可以看出,在工作速度不超过7.2 km/h时,追肥机械施肥精度随着前进速度增加而减小,施肥精度最小为95.42%,追肥机械施肥精度满足标准要求;在同样工作速度下,深、浅层排肥装置施肥精度差别很小,排肥装置分层施肥性能比较稳定。
3.2.3施肥深度准确性试验
施肥深度能够较好地反映追肥状态以及肥力效果,按照施肥均匀性试验的田间试验安排,在低、中和高3种前进工作速度下,进行田间追肥施肥深度检测试验,任意选取一个施肥行,沿施肥方向每间隔1 m进行一次深度测量,共进行20次测量,施肥深度田间试验如图14所示,试验数据与处理结果如表4所示。
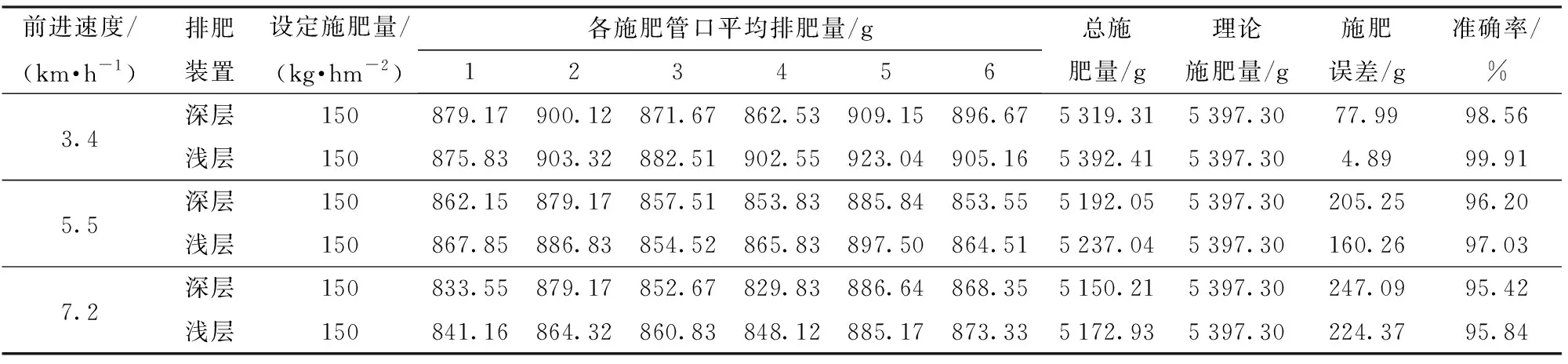
表3 施肥量准确率试验结果Tab.3 Statistical results of fertilization quantity accuracy
由表4可知,在追肥作业速度不超过7.2 km/h时,深、浅层施肥深度均满足施肥设定要求,深层开沟施肥深度受速度影响较小,深度平均值最小为11.04 cm,深度变异系数不超过5.35%;浅层扎穴施肥深度平均值随着作业速度的增加而减小,施肥深度平均值最小为6.9 cm,变异系数最大为9.36%。
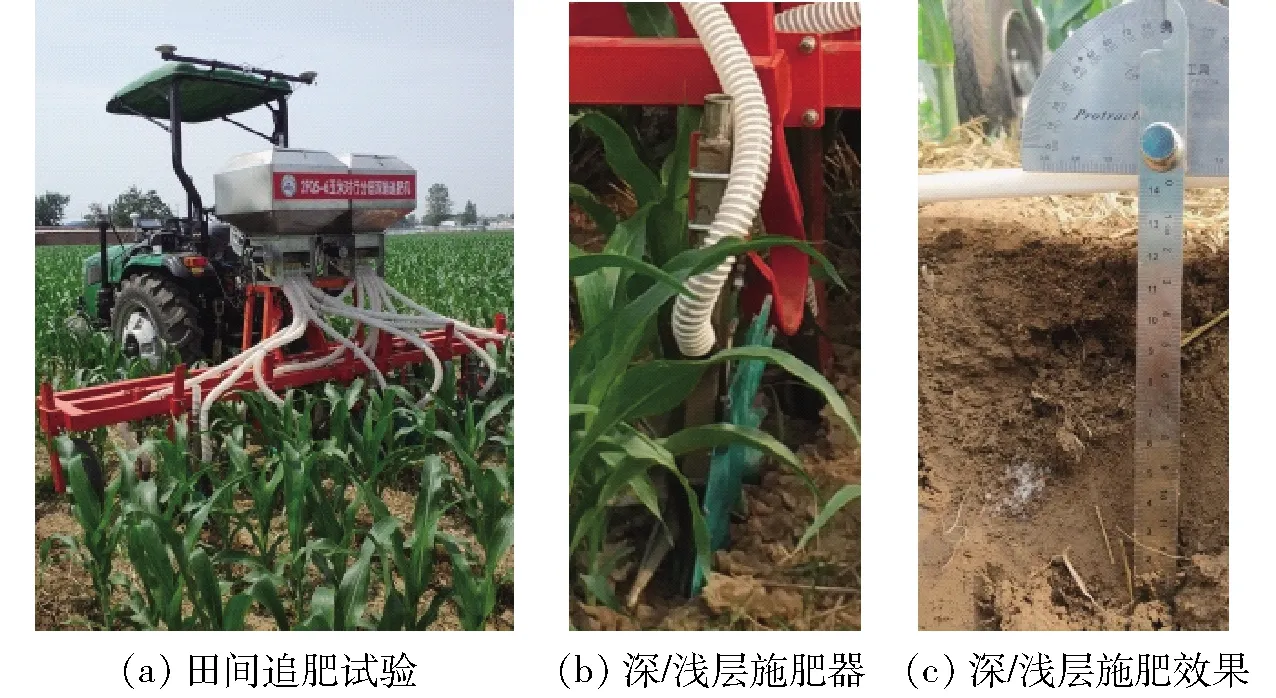
图14 田间追肥试验现场Fig.14 Field test of fertilizer applicator

表4 施肥深度准确性试验结果Tab.4 Experimental results of fertilizing depth accuracy
4 结论
(1)针对玉米中期追肥生产需要,设计了一种集排风送式玉米分层追肥机。在玉米生长中期进行追肥作业时,该机能够实现多行快速深浅分层施肥作业;基于TTC32开发了一套具有人机交互功能的追肥控制系统,简化了作业系统的变量设置,实现了系统追肥作业的连续性,使施肥量能够随工作速度自适应变化,提高了追肥作业效率和肥料利用率。
(2)进行了多行集中排肥装置排肥量一致性室内试验,结果表明:在电机相同转速下,深、浅层排肥装置排肥量差异性较小,各行之间施肥口排肥量一致性较好;随着转速增加,各行之间排肥量变异系数有所减小,最大变异系数为2.64%,转速对排肥量一致性的影响不明显,各行之间排肥量比较均匀、稳定。
(3)为了验证该追肥样机的作业性能,进行了样机田间追肥试验,结果表明,在试验速度范围内,随着工作速度的增加,追肥机械施肥精度呈逐渐减小趋势,施肥精度最小值为95.42%;深层施肥深度变化量不大,施肥深度均值最小为11.04 cm,变异系数不超过5.35%;浅层施肥深度有所降低,施肥深度均值最小为6.9 cm,变异系数不超过9.36%;追肥机性能达到设计目标,能够满足玉米追肥机械作业标准要求。
猜你喜欢
水土保持学报(2022年5期)2022-10-10
现代农村科技(2022年9期)2022-08-16
现代农业(2022年3期)2022-07-05
建材发展导向(2021年24期)2021-02-12
林业科技(2020年3期)2021-01-21
北广人物(2020年8期)2020-03-19
旅游(2019年11期)2019-12-20
农民致富之友(2019年4期)2019-03-13
作文通讯·初中版(2017年12期)2018-03-31
人民周刊(2017年23期)2018-03-14