基于振动特征估计的气体绝缘开关设备故障检测与定位
2020-12-16 00:55梁博渊刘宏亮刘晓冬
科学技术与工程 2020年31期
梁博渊, 高 骏, 刘宏亮, 刘晓冬
(国网河北省电力有限公司电力科学研究院, 石家庄 050021)
气体绝缘金属全封闭开关(gas insulated switchgear, GIS)设备优势突出,已被电力行业普遍接受[1]。但随着设备装机容量的增长以及运行条件的恶化,GIS设备故障事件时有发生。一方面,密封运行的GIS设备内部发生故障,不易被发现;另一方面受限于现场条件,GIS设备发生故障后检修较为困难,严重影响客户的用电需求。因此,研究有效的GIS设备故障检测与故障定位方法对电力系统具有积极的意义。
目前,常利用超声波[2]、超高频[3]、脉冲电流[4]、气体分解物[5]及外壳振动信号[6]来检测GIS设备的故障。振动因其可直接反映设备内部故障、易采集且不会影响设备内部电磁场分布,在电气设备的故障检测领域已得到广泛应用[7]。
文献[8]研究了GIS设备金属外壳受激振力作用产生振动的现象,首先提出利用振动信号检测设备内部故障;文献[9]与文献[10]分别针对三相分体、三相共体GIS设备金属外壳的振动机理进行了分析。在此基础上,文献[11]采用小波包方法分析GIS金属外壳振动信号来检测设备沿面放电故障;文献[12-13]在实验室搭建GIS模型研究了设备金属外壳振动信号与触头接触异常的关系,文献[14]利用振动信号来检测GIS母线触头松动缺陷。更进一步,文献[15-16]构建了基于金属外壳振动的GIS设备故障检测系统并成功应用于实际变电站现场。但是,上述研究仅可实现在故障发生后的检测,不能够在故障产生初期感知故障,也无法准确实现故障的定位。
针对上述问题,提出一种基于振动特征估计的GIS设备故障检测与定位方法。首先,提取金属外壳上多测点振动特征并基于多输出支持向量回归(multi-output support vector regression, MOSVR)模型建立GIS设备振动特征估计器。然后,定义估计器输出值与特征测量值之间的差异为特征残差,利用多测点振动特征残差的相对值计算设备的故障预警指标,结合自适应阈值方法实现GIS设备机械故障与绝缘故障的检测。检测出故障后,利用箱形图分析多测点振动特征残差来实现GIS设备故障的定位。
1 GIS外壳振动及振动特征的选取
对于正常运行的GIS设备来说,金属外壳振动主要由电磁感应及磁致伸缩引起。如图1所示,导体中流过的交流电流会在金属外壳处产生交变的电磁场,存在一定厚度的外壳中会产生稳定的环流,该环流受磁场力的作用即会引起金属外壳的振动,振动频率为100 Hz。
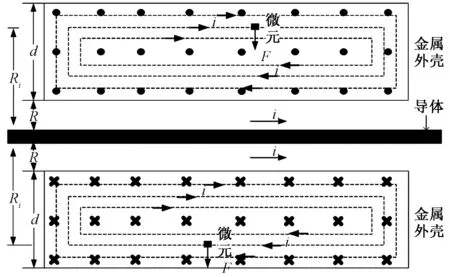
i为外壳中的环流;i0为流经导体的电流;F为金属外壳电流微元的受力;d为壳体厚度;R为导体与壳体的安装距离;Ri为壳体中电流元与导体的距离图1 GIS金属外壳受力示意图Fig.1 Force diagram of GIS metal enclosures
除此之外,金属外壳中的铁磁材料在交变电磁场作用下会出现尺寸上的变化,体现在外壳上即为振动,研究表明,GIS金属外壳上由磁致伸缩现象引起的振动频率也为工频的2倍即100 Hz。
根据上述分析发现,正常稳定条件下,GIS金属外壳会产生基频为100 Hz的稳定振动,且当设备内部发生异常时,GIS金属外壳振动信号会产生相应的变化。通过对金属外壳电流微元的受力分析发现,外壳振动信号基波分量幅值与导体中电流的平方成正比[9],一旦电力系统的负荷发生变化,外壳振动信号基波分量幅值也会随着负荷的变化而变化。
由于电流与磁通之间存在的非线性关系,外壳振动信号中会含有谐波分量。但是,正常情况下以100 Hz为基频的谐波分量相对较小,可以近似认为谐波分量幅值也与电流的平方成正比。基波分量占总分量的比例(x)计算公式为

(1)
式(1)中:I表示负载电流值;x表示基波分量占总分量的比例值;Xb表示基波分量幅值;Xh表示谐波分量幅值;kb表示基波分量与电流平方的比例系数;kh表示谐波分量与电流平方的比例系数。
由式(1)可得,设备金属外壳振动信号基波分量幅值占总分量的比例值可以消除GIS设备中导体电流对基波分量幅值的影响,使得系统负荷发生改变时不会出现GIS设备故障误检现象。
同时,观察式(1)可以发现,一旦设备类型确定,kb、kh也就确定,即理论上振动信号基波分量占总分量的百分比为一个定值。但是受外界环境及其他因素的影响,正常状态下振动信号基波分量占总分量的百分比会在很小的范围内波动。基于实测振动信号计算GIS设备的金属外壳振动信号基波分量占总分量的百分比流程如下。
首先,利用傅里叶变换处理t时刻采集的GIS金属外壳振动信号v(t),得到信号的频谱特征Sf,计算公式可表示为

(2)
式(2)中:Sf表示频谱图中频率f对应的幅值,mV。
然后,基于振动信号频谱特征利用式(3)计算实际采集振动信号基波分量占总分量的百分比:
(3)
式(3)中:S100表示频谱图中100 Hz对应的幅值;Sh表示频谱图中谐波频率对应的幅值,mV。
2 基于MOSVR模型与自适应阈值的GIS故障检测
2.1 GIS设备多测点振动特征估计器的建立
由于GIS设备内部结构复杂,同一设备不同振动采集点处采集的信号会因内部具体结构而异。但是,对某一具体GIS设备(例如隔离开关)而言,不同采集点处的振动信号也必定存在一定的相关关系。为了解决单个传感器无法准确实现GIS设备故障检测与定位的问题,利用特征估计的方法来综合考虑设备外壳上多测点振动特征,即选用多输出支持向量回归方法来建立估计器以适应GIS设备多输入多输出的特性。
MOSVR方法可以实现多输出量回归模型的建立,且模型中的核函数参数、惩罚因子、不敏感参数可以通过遗传算法寻优得到。假设由正常状态下GIS设备某时刻多采集点振动特征组成的训练样本为(xi,yi),样本总数为l,模型输入xi维度为d,相应的输出yi维度为Q,要构建的回归函数为
f(x)=ωTΦ(x)
(4)
式(4)中:f()为多输出回归函数;ω为权重向量;Ф(x)表示核函数;σ为径向基核函数参数。
为了综合考虑多分量的拟合误差,同时减小噪声的影响,多输出支持向量回归算法将损失函数定义为一个超球体,函数方程为

(5)
式(5)中:ε为不敏感参数。
基于最小化结构风险原则,回归问题可以转化为如下的最小化约束问题:
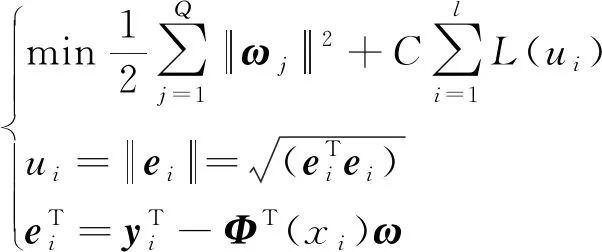
(6)
式(6)中:C表示惩罚因子;ei表示样本i的估计误差。
利用拉格朗日函数法将上述问题化为无约束规划:

(7)
式(7)中:α表示拉格朗日乘子;Q表示维度。
对上述无约束函数计算偏导数,求函数的极值点:
(8)
式(8)中:ui表示样本i估计误差的模值。
利用迭代方法即可求得多输出的支持向量回归函数[17]。若xi为t时刻振动特征取值,yi为t+1时刻振动特征取值,则回归方程[式(2)]可替换为
xt+1=f(xt)=ωTΦ(xt)
(9)
回归函数模型搭建完成后,只需将某一时刻的多采集点振动特征作为输入即可实现下一时刻多测点振动特征的预测估计。
2.2 残差以及故障预警指标的计算
GIS设备多采集点振动特征估计器构建完成后,可实时估计正常状态下设备多测点振动特征。通过对大量现场数据的分析发现,正常状态下设备多测点振动特征的实际测量值与模型预估值间差异很小,而一旦出现故障,二者差异将会显著增大。故将振动特征回归模型预测值与实际测量值间的差异定义为残差:
ct|k=|f(xt)|k-mt|k|
(10)
式(10)中:f(xt)|k、mt|k分别表示模型输出及实际测量的第k个采集点振动特征;ct|k表示t时刻测点k处振动特征的残差。
为了避免多个采集点处振动特征量级不同造成的误差,综合多测点振动特征残差的相对值来计算GIS设备故障预警指标:
(11)
式(11)中:Bt表示t时刻设备的故障预警指标。
2.3 基于自适应阈值的GIS故障检测
由于GIS设备结构复杂,外界因素的变化极可能会引起金属外壳振动特征的波动,如果设定恒定阈值来检测设备故障很容易出现误报警现象,为此引入指数移动加权平均算法来设定自适应阈值。
考虑历史数据的影响,指数加权移动平均控制图当前时刻统计量Rt可表示为
Rt=λBt+(1-λ)Rt-1
(12)
式(12)中:λ为历史故障预警指标对统计量的影响权值;Rt为到时段t为止故障预警指标的平均值。
当前时刻统计量Rt的期望以及方差计算式为
(13)
式(13)中:μBt为GIS设备历史Bt的平均值;σBt为Bt的标准差;ns为采样长度;λ为历史故障预警指标对统计量的影响权值。
此时,随时间变化的GIS设备故障检测阈值计算式为

(14)
式(14)中:阈值参数m取值为3。
实时采集GIS外壳多测点振动信号,计算故障预警指标Bt及自适应阈值,并观察二者的变化趋势,若预警指标越过阈值,则认为设备出现故障,反之认为设备工作正常,即:

(15)
3 基于箱形图分析的GIS故障定位
如前文所述,利用GIS金属外壳多测点振动特征可以有效检测设备故障。当设备正常运行时,金属外壳振动特征残差接近于零,而一旦出现故障,故障点处振动特征残差会显著增大,并且随着时间的推移,残差会呈现较大的波动性。
箱形图是一种数据统计图,如图2所示,它根据样本的中位数,上、下四分位数进行样本特征的统计分析,可准确描述数据集的离散分布情况。
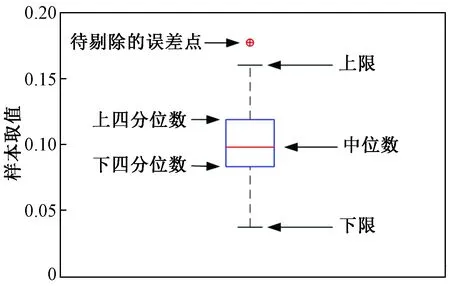
图2 箱形图的基本组成Fig.2 Basic composition of the box plot
假设某采集点处振动特征残差样本为c=(c1,c2,…,ct,…,cn),从小到大排序后残差样本变为G=(G1,G2,…,Gt,…,Gn)。
(1)上、下四分位数。当(n+1)/4为正整数时样本下四分位数Q1,上四分位数Q3可表示为

(16)
当(n+1)/4不为正整数时,样本下四分位数Q1,上四分位数Q3可表示为
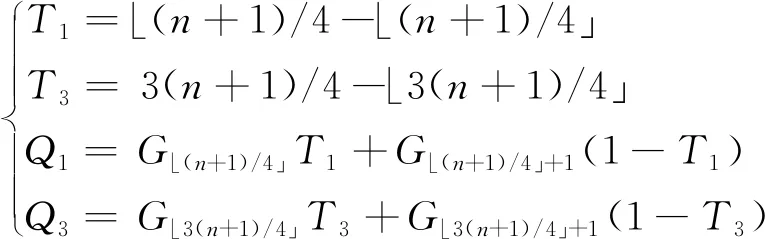
(17)
式(17)中:⎣ 」表示向下取整;T1表示(n+1)/4与⎣(n+1)/4」的差值;T3含义与T1类似;G⎣(n+1)/4」、G⎣(n+1)/4」+1表示排序后的残差数列G中从左到右的第⎣(n+1)/4」及第⎣(n+1)/4」+1个元素,G⎣3(n+1)/4」及G⎣3(n+1)/4+1含义与G⎣(n+1)/4」、G⎣(n+1)/4」+1类似。
(2)中位数Q2。
(18)
(3)上限Qmax是随机数据非异常范围内的最大值:
Qmax=Q3+1.5(Q3-Q1)
(19)
下限Qmin是随机数据非异常范围内的最小值。
Qmin=Q1-1.5(Q3-Q1)
(20)
检出故障后,利用上述方法处理故障状态下测得的GIS设备金属外壳多测点振动特征残差数据,得到相应测点对应的箱形图,观察不同振动测点残差的分布情况可实现GIS设备故障的定位。
4 仿真分析
4.1 算法流程
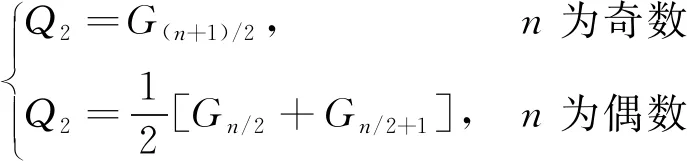
从实际应用出发,首先以正常状态下收集的历史数据为基础,结合多输出支持向量回归模型构建GIS设备振动特征估计器。将实时测量的振动特征输入估计器计算得到设备的故障预警指标,并通过指数移动加权平均算法衡量故障预警指标是否越限来实现设备故障的检测。检测出故障后,利用箱形图分析设备多测点振动特征的残差,以实现故障的定位。GIS设备故障检测与定位方法的总体框架如图3所示。
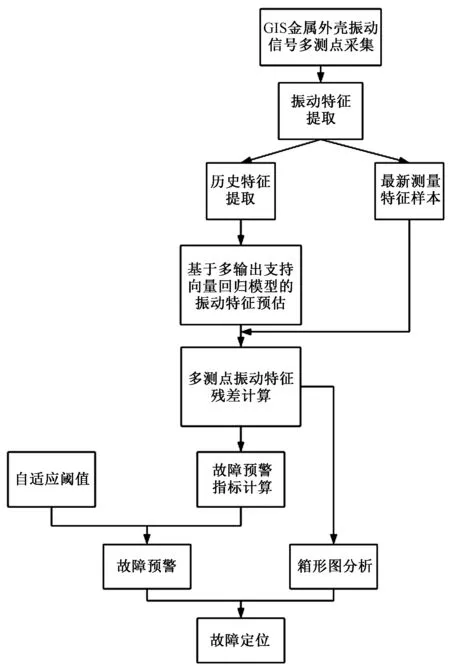
图3 GIS故障检测与定位算法框图Fig.3 Block diagram of GIS fault detection and location algorithm
4.2 算例介绍
为了充分验证基于振动特征分析的GIS设备故障检测与定位方法的有效性,利用变电站现场GIS隔离开关设备正常、紧固件松动故障、盆式绝缘子缺陷故障3种状态下的数据进行仿真分析。特高压变电站GIS设备主要技术参数如表1所示。
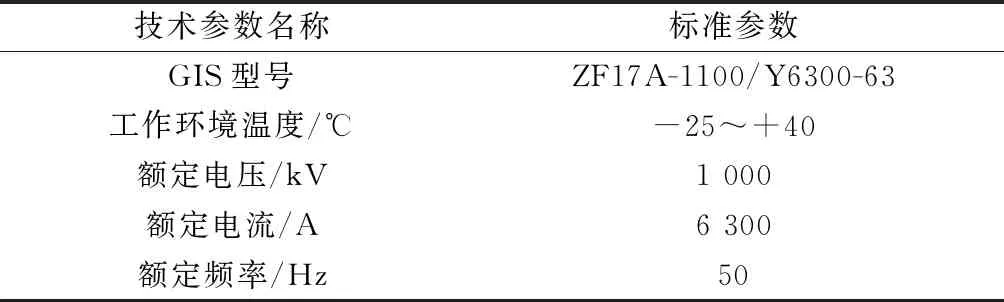
表1 变电站现场GIS主要技术参数
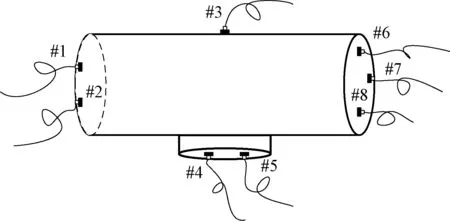
图4 现场GIS设备振动采集点分布图Fig.4 Distribution of vibration collection points of GIS in substation site
图4为简化的采集点分布图,所有测点采样频率设为44.08 kHz。MOSVR模型中选用径向基核函数,遗传算法寻优中种群数量设置为20,迭代次数选为200;历史故障预警指标对统计量的影响权值λ=0.3,测点个数k=8。
4.3 GIS多测点振动特征估计器的建立
将正常状态下GIS多测点振动特征数据作为样本,建立设备多测点振动特征估计器。利用遗传算法对MOSVE模型参数进行寻优,模型参数最优解如表2所示,寻优过程的适应度曲线如图5所示。

表2 模型参数寻优结果
4.4 GIS设备故障检测分析
分别处理3种不同状态下的现场实测数据,计算不同状态下GIS设备的故障检测指标以及自适应阈值。不同状态下设备的故障检测指标及自适应阈值变化趋势如图6所示。通过观察图6(a)发现,正常状态下设备故障检测指标较小,并且在自适应阈值以下范围内波动。
观察图6(b)、图6(c)发现,在发生故障之前故障预警指标与正常运行状态类似,但一旦产生故障,预警指标会逐渐越过自适应阈值,此时认为检测出了故障,需给出报警信号。
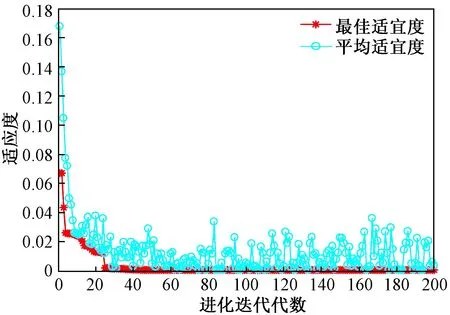
图5 参数寻优适应度曲线Fig.5 Fitness curve of parameter optimization
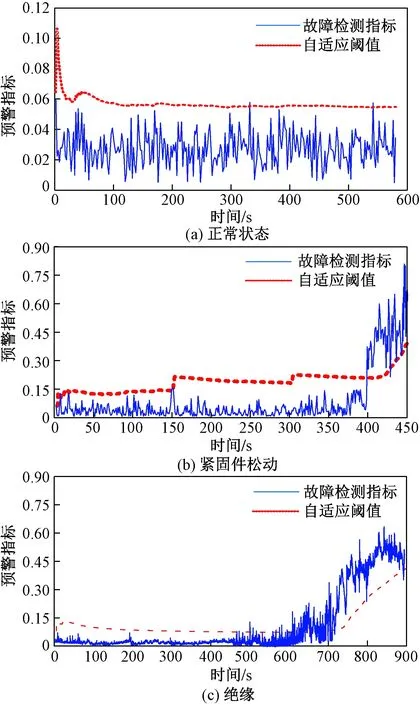
图6 故障检测指标及自适应阈值Fig.6 Fault warning indicator and adaptive threshold
4.5 GIS设备故障定位分析
利用箱形图分析正常、盆式绝缘子缺陷、紧固螺栓松动3种不同状态下的多测点振动特征残差样本,不同状态仿真结果如图7所示。观察图7(a)可以发现,正常状态下各测点振动特征残差相对集中,且不同测点间差异相差较小。
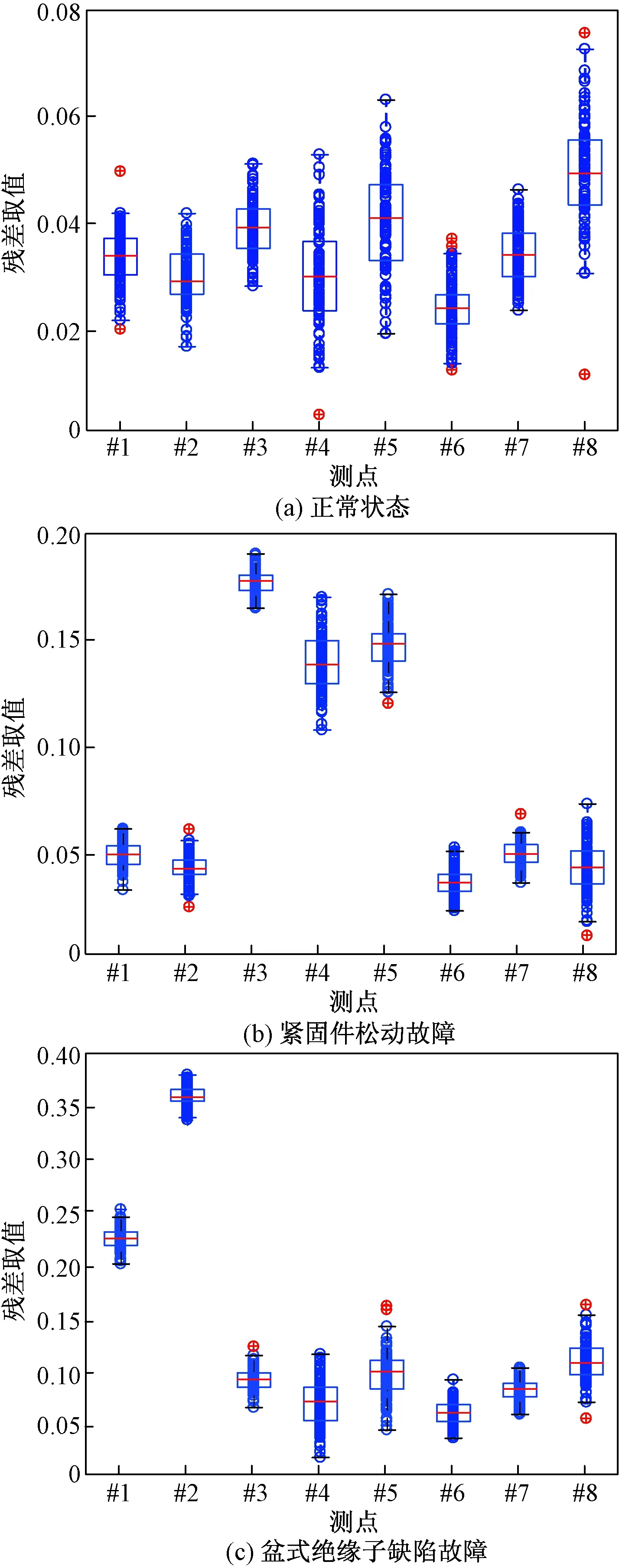
图7 各测点特征残差箱形图Fig.7 Box plot of residual characteristics of each measuring point
图7(b)中#3、#4、#5测点的特征残差明显高于其他测点,认为此时故障发生在设备中部;图7(c)中#1、#2测点的特征残差明显高于其他测点,认为此时设备故障发生在测点#1、#2侧。同时,当设备出现故障后金属外壳上不同测点振动特征残差都会存在一定程度的变化,但是故障发生位置附近变化最为明显。
对比正常状态以及多种故障状态下的仿真结果图可以发现,基于箱形图分析来进行GIS设备的故障定位优点如下:
(1)实现了GIS设备金属外壳多测点振动特征残差数据的可视化,可清晰明了的观察不同测点的异同,实现故障的定位。
(2)从图7中可以看出,箱形图可以根据统计特性有效检测振动特征残差样本中的误差数据,有效避免了其对故障定位结果的影响。
5 结论
提出一种基于振动特征分析的GIS设备故障检测与定位算法。首先,利用多输出支持向量回归方法建立GIS多测点振动特征估计器;之后,定义特征估计器输出值与实际测量值之间的差异为振动特征残差,并综合多测点残差信息计算故障预警指标,结合指数移动加权平均自适应阈值方法实现设备故障的检测;检测出故障后,利用箱形图分析多测点振动特征残差来实现设备故障的定位。最后,基于现场实测数据仿真分析得出以下结论。
(1)利用多输出支持向量回归算法可实现GIS设备金属外壳多测点振动特征的建模;
(2)基于指数移动加权平均自适应阈值方法可有效检测GIS设备机械故障与绝缘故障;
(3)利用箱形图分析GIS设备金属外壳多测点振动特征残差可提高设备故障的定位准确性。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
网络安全与数据管理(2022年3期)2022-05-23
制造技术与机床(2022年2期)2022-02-22
汽车实用技术(2021年10期)2021-06-04
北京航空航天大学学报(2020年10期)2020-11-14
读者·校园版(2020年19期)2020-09-16
天津城建大学学报(2020年4期)2020-09-10
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
北京航空航天大学学报(2019年9期)2019-10-26