
感应加热电源信号源设计
2020-12-31 09:32李森黄海波孙帆卢军孙永新李艳
湖北汽车工业学院学报 2020年4期
李森,黄海波,孙帆,卢军,孙永新,李艳
(湖北汽车工业学院 电气与信息工程学院,湖北 十堰442002)
随着国家对能源结构的调节以及电子控制技术的发展,越来越多的钢铁冶炼、锻造和热冲压加工企业采用感应加热的方式对金属材料进行加工处理。感应加热电源采用电磁感应原理在被加热的材料内部形成涡流,通过涡流的发热效应[1]对金属材料进行加热。感应加热电源具有温度控制精确、加热速度快、能源利用率高等优点[2],因此在许多领域得到广泛的应用[3]。由于金属材料种类、形状、大小不同,对其进行加热时,加热频率和功率也不同,因此要求所设计的信号源具有调幅与调频的功能。如果多个电源并行工作时,要求加热区之间必须同频同相,因此要求信号源具有调相的功能。针对加热过程中工件或材料状态变化及集肤效应,吴健颖等人提出了一种单桥双频的感应加热方式[4];产生逆变控制信号时,采用查表的方式产生正弦调制波和三角载波,这对于FPGA的内存资源消耗较大。针对电源的功率调节,陈富豪等人提出了基于脉宽移相的功率调节方法[5],该方法运算较复杂,消耗资源较多。文中采用CORDIC(coordinate rotation digital computer)算 法 与DDS(direct digital synthesizer)算法相结合的方式,利用直接数字比较的方法,生成幅频相可调的SPWM(sinusoidal pulse width modulation)控制信号,满足感应加热电源对频率、相位和功率控制的要求。
1 SPWM波驱动全桥电路原理
SPWM 波对感应加热电源的控制是通过驱动全桥逆变电路实现[6]。全桥逆变电路结构见图1,由开关管A1、A2、B1、B2和续流二极管D1、D2、D3、D4组成[7-8]。SPWM控制器产生的SPWM波作用于开关管的栅极U1、U2、U3、U4;当U1、U4为高电平时,A1、B2导通,A2、B1截止,电流流向为Ud→A1→a→负载→b→B2;当U2、U3为高电平时,B1、A2导通,A1、B2截止,电流流向为Ud→B1→b→负载→a→A2;控制同一半桥的上下两路SPWM波互补,左右2个半桥之间的相位相差180°。输出电压的大小由调制度决定,开关管的频率由载波频率决定。
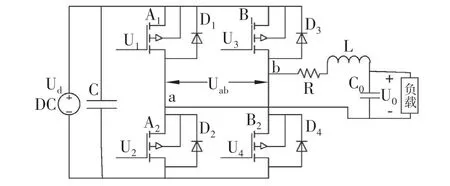
图1 全桥逆变电路
2 DDS原理
DDS 是通过直接数字频率合成的方式合成需要的数字波形,具有相位连续性好、频率响应时间短、频率精度高等优点[9],容易实现幅、频、相的精确控制。DDS原理流程如图2所示,DDS结构如图3 所示[10]。当每个时钟到来时,相位线性递增,随着相位的不断递增,输出波形数据也不断刷新。相位累加器的溢出周期就是DDS信号发生器的输出信号的周期[11]。设频率控制字fword的值为M,相位累加器为N位,则输出信号的频率fout与系统时钟fclk的关系为[12-14]

图2 DDS原理流程图
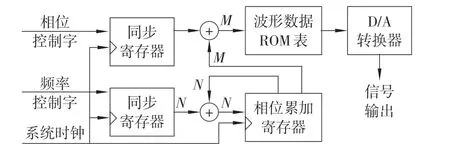
图3 DDS基本结构图

3 CORDIC算法原理与优化
3.1 CORDIC算法正余弦值计算原理
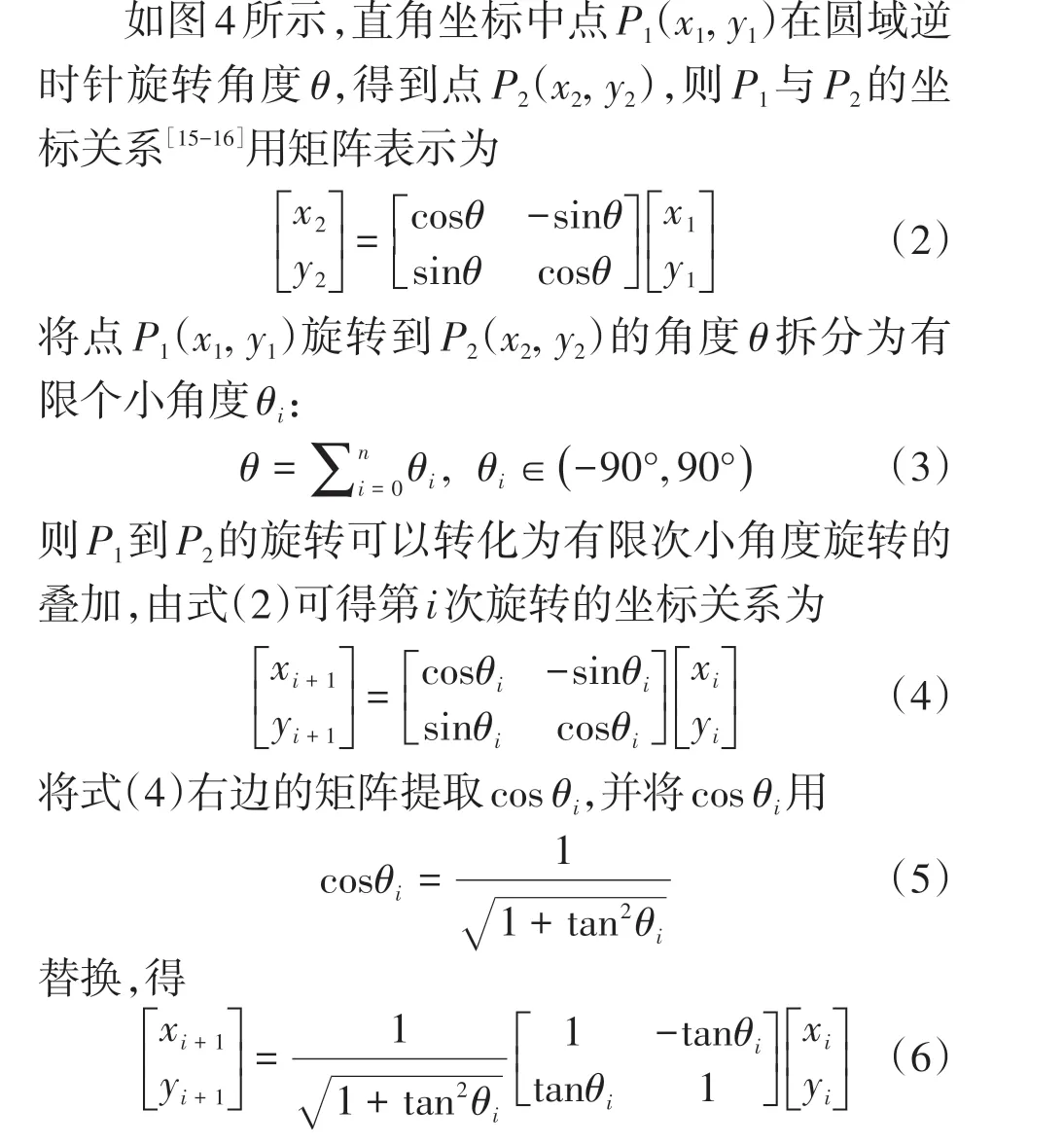

图4 坐标旋转关系

3.2 CORDIC算法角度收敛范围优化
传统CORDIC 算法角度收敛范围为-99.88~99.88°,通过角度数值分段与象限划分处理的方法,将角度的收敛范围扩大到(0,+∞)任意角度的计算。实现原理如下:将表示角度数值的位数划分为高、中、低3段,分段表示结构如图5所示。高段数值用于表示360°整数倍的角度值;中段数值为2位二进制数,用于象限划分,划分为4个象限,00表示第一象限,01 表示第二象限,10 表示第三象限,11表示第四象限。低段数值表示每个象限内的角度值,这样任意θ∈(0,+∞)都可以表示为
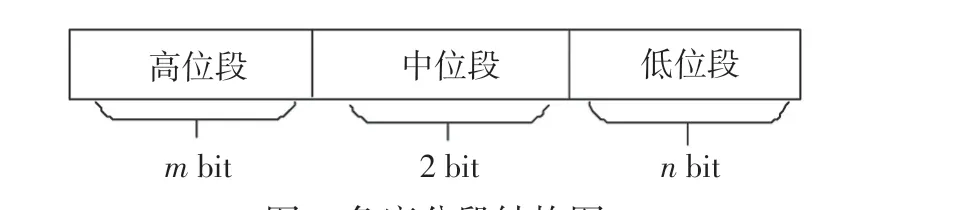
图5 角度分段结构图

式中:m为高位段数值;k为中位段数值;n为低位段数值。由于三角函数具有周期性和对称性,对于任意输入角度θ,计算时采取角度数值截断的方法处理,只截取角度数值的中段和低段。首先进行低位角度值的正余弦值计算,然后判断中段象限,最后根据三角函数的转化关系计算出该角度的正余弦值,处理流程如图6所示。
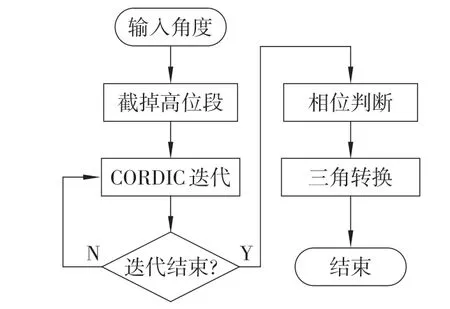
图6 截位计算流程图
3.3 CORDIC算法的硬件实现
CORDIC算法有循环式与流水线式2种实现结构[17],由于循环结构计算1个角度的正余弦值需要消耗多个时钟周期,速度较慢,不利于高速信号的产生,因此采用16级流水线结构,如图7所示。每级只需要3个加减运算器和2个移位寄存器,因此在硬件结构上容易实现,且运算速度高,每个时钟周期可以计算出1个角度的正余弦值。
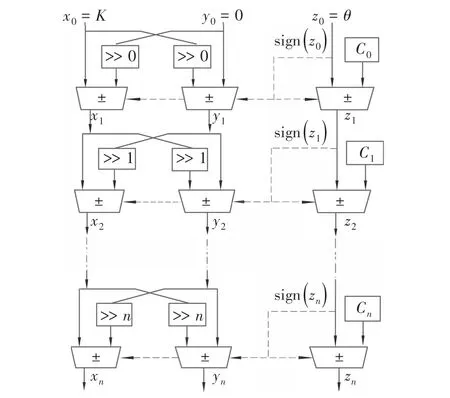
图7 CORDIC流水线结构图
4 死区可调SPWM实现
4.1 基于CORDIC的正弦波实现
CORDIC算法实现DDS正弦信号,其结构与传统DDS基本相同,如图8所示。只需将传统DDS结构中的ROM 查找表模块用CORDIC 迭代模块、角度转换模块和三角函数转换模块替换,将相位控制寄存器与相位累加寄存器的和作为角度转换模块的输入,CORDIC迭代的输出作为三角函数转换模块的输入,三角转换模块的输出就是最终的数字正弦、余弦波。编写Verilog代码,并在ModelSim中进行仿真,结果如图9所示。

图8 CORDIC_DDS结构图
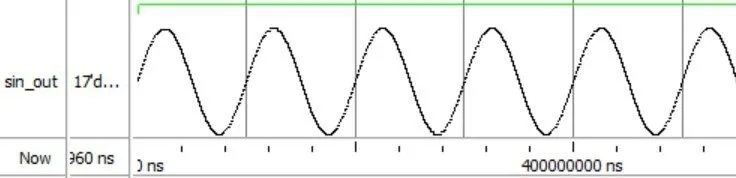
图9 CORDIC正弦波仿真波形图
4.2 幅频相调节实现
正弦波频率的调节是通过控制CORDIC_DDS结构中输入频率控制字的值来调节频率的大小。频率控制字本质上是控制信号的相位累加速度,频率控制字数值越大,则相位累加越快,单位时间内信号的完整波形越多,频率越高。通过按键调节频率控制字的数值,从而改变频率,仿真波形如图10所示,可知频率为10~100 Hz 可调。为了便于观察,将频率增量的大小设置为10 Hz。通过改变相位控制字的数值大小来调节初始相位,仿真波形如图11所示,计算公式为

式中:M为相位寄存器的位数;φ为需要设置的相位值;Pword为相位控制字。为了便于观察,设置相位调节的步进值为30°,实际调节的精度设计为1°。通过采用移位与乘以幅值控制因子的方法实现正弦波幅值的调节:先将CORDIC_DDS 输出的数字正弦波进行算术右移10 位,然后再乘以幅值控制因子,即可实现幅度的调节。根据实际需求设置0~1024 挡可调,每次的步进值为1,仿真波形如图12 所示。利用DDS ROM 查表法生成的正弦波512 挡调幅,仿真如图13 所示,可知波形量化失真严重,当幅度调节增加到1024挡,波形量化失真将更加严重。因此采用CORDIC 算法产生的正弦波精度更高。
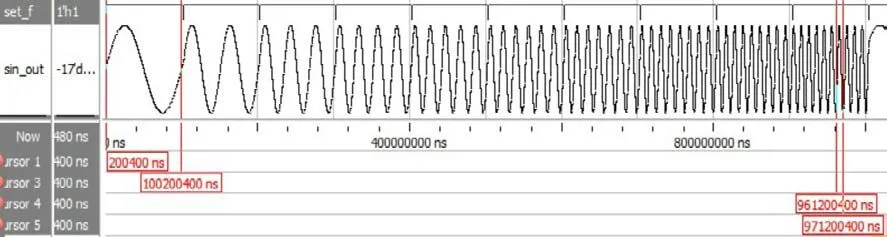
图10 频率调节仿真波形图

图11 相位调节仿真波形图

图12 CORDIC幅值调节仿真波形图
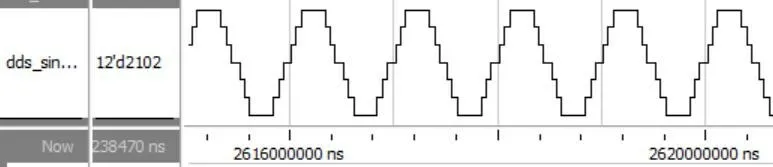
图13 ROM表幅值调节仿真波形图
4.3 数字三角波实现
感应加热电源中采用载波频率固定,调制波幅、频、相可调的SPWM 波。数字三角波生成模块由数字分频器、幅值加减器、数值比较器组成,结构如图14a 所示。数字分频器对输入的系统时钟进行分频,得到幅值加减器需要的驱动频率,幅值加减器在每个驱动时钟的作用下不断进行幅值累加或递减,数值比较器将幅值加减器输出的幅值与最大最小幅值进行比较,当幅值到达最大时,减计数使能端有效,加计数无效;当幅值到达最小时,加计数使能端有效,减计数无效。编写Verilog代码,并在ModelSim中进行仿真,仿真波形如图14b所示。

图14 数字三角波结构及仿真波形图
4.4 SPWM波实现
将CORDIC_DDS 模块输出的正弦调制波与数字三角波发生模块产生的三角载波进行比较,生成SPWM 波,当正弦波幅值大于三角波幅值时,SPWM输出为高电平,反之为低电平[18]。SPWM波的脉宽随正弦波幅值呈周期性变化。编写Verilog 代码,并在ModelSim中进行仿真,仿真波形见图15。

图15 SPWM波形仿真波形图
4.5 死区实现

图16 死区仿真波形图
全桥驱动电路在工作时,任何时刻同一桥臂只允许上下2 个开关管中的其中1 个导通,另1 个关闭。如果2个开关管同时导通,会使电流不经过负载,直接通过上下2 个开关管流回电源,形成很大的电流,而使开关管烧毁,因此要求控制同一桥臂上下2 个开关管的SPWM 波具有互补功能。当开关管关断时,不能立即截止,需要一定的关断时间,因此当其中1个开关管关断时,另1个不能立即导通,否则就会烧毁开关管,要求2 路互补的SPWM波之间必须存在死区时间[19]。实现2 路互补且具有死区SPWM波的方法如下:输入的主SPWM中,1路对其上升沿进行延时,另1路对其下降沿进行延时再取反。编写Verilog 代码,并在ModelSim 中进行仿真,波形如图16所示。
将编写好的Verilog 代码下载到EP4CE10 F17C8 FPGA 芯片中,并用QuartusII 自带的signal-TapII 逻辑分析仪抓取实际SPWM 输出信号[20],结果如图17所示,由图17可知,输出的SPWM波上下2路波形互补,且带有死区,表明系统设计正确。

图17 实际验证波形图
5 结语
根据感应加热电源对控制信号的要求,采用CORDIC 算法与DDS 相结合的方法,利用FPGA 设计了能产生4 路两两互补输出、相位互差180°、具有死区调节功能且幅频相可调的SPWM波信号源。通过Verilog 编程实现了设计,并在ModelSim 软件中仿真,验证了其正确性,同时在EP4CE10F17C8 FPGA上进行验证,证明了设计的可行性。
猜你喜欢
现代食品科技(2022年8期)2022-09-02
装备维修技术(2022年7期)2022-07-01
振动与冲击(2022年10期)2022-05-30
中学生数理化·高一版(2022年3期)2022-04-05
中学生数理化·八年级物理人教版(2021年9期)2021-11-20
攀枝花学院学报(2021年5期)2021-10-19
初中生学习指导·提升版(2020年10期)2020-09-10
山东工业技术(2018年5期)2018-03-10
大陆桥视野·下(2017年9期)2017-09-17
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
