带旋转导向工具的底部钻具组合横向振动特性研究
2021-01-02 16:47狄勤丰芮子翔冯大军王文昌
石油钻探技术 2021年6期
狄勤丰, 芮子翔, 周 星, 冯大军, 王文昌, 陈 锋
(1. 上海大学力学与工程科学学院,上海 200444;2. 上海大学机电工程与自动化学院,上海 200444)
不同于滑动式导向工具,旋转导向工具可以灵活调整钻头侧向力的大小和方向,大幅提高井眼轨迹的控制精度,显著提高钻井效率[1-2]。Schlumberger公司的PowerDrive系统、Baker Hughes公司的AutoTrack系统和Sperry Sun公司的GeoPilot系统是最具代表性的旋转导向工具[3-5],按功能可依次称为动态推靠式、静态推靠式(也叫连续矢量导向式)和指向式旋转导向系统。旋转导向系统已朝着混合模式发展,如PowerDrive Xceed系统已具备动态指向功能。我国自20世纪90年代初期开始进行旋转导向系统攻关研究,目前已形成了可以实际应用的旋转导向系统,如中海石油研发的Wellhead系统、航天深拓的AutoServo系统等,但主要是工具的研发,对带旋转导向工具底部钻具组合(BHA)静力学和动力学特性的关注甚少[6-8]。为了充分发挥旋转导向工具的导向能力,防止钻具失效,需要对BHA的动力学特性进行研究,为钻井参数和结构参数的优化提供依据[9-13]。
研究表明,在外力作用下,钻柱可能发生较为严重的轴向、横向和扭转振动,继而诱导产生粘滑、涡动等复杂形式的振动。横向振动沿钻柱向上传播的过程中急剧衰减,因此横向振动在BHA段最严重。T. M. Burgess等人[14]采用静力学方法求解BHA的上切点位置,对切点以下钻具的横向振动特性进行了有限元分析;M. W. Dykstra[15]采用有限元法对全井钻柱进行静力学分析,利用Newmark方法对全井钻柱进行瞬态动力学分析,发现BHA是横向振动的主要部分。张鹤等人[16]采用加权余量法求解BHA静力学模型,确定了预弯BHA的上切点位置,用有限元方法分析了其横向振动特征。可以看出,上述研究都是针对常规BHA或预弯BHA的。为此,笔者首先建立了带静态推靠式旋转导向工具的BHA(后文用RSBHA表示)的静力学模型,利用加权余量法和切点优化法求解其空间构形和上切点位置,并将上切点到钻头的距离作为动力学分析的有效长度;然后建立有限元模型,分析其模态特征和稳态响应,以及钻压、转速、偏心距和偏心方位角对横向振动的影响。研究结果可为RSBHA的设计和应用提供理论依据。
1 RSBHA的三维静力学模型
RSBHA的典型结构如图1所示,旋转导向工具位于钻头上方,导向翼肋到钻头的距离为L11,近钻头稳定器到钻头的距离为L1,2个稳定器之间的距离为L2,2个稳定器中间放置了一根长为L22的柔性短节,以便充分发挥旋转导向工具的导向能力,其与近钻头稳定器的距离为L21。

图1 RSBHA结构示意Fig.1 Structure of RSBHA
为了求得RSBHA在钻压作用和井壁约束下的三维空间构形,特作以下假设:1)钻柱截面为圆形或圆环形;2)钻柱处于弹性变形状态;3)忽略剪力对变形的影响;4)钻柱的轴向变形非常小;5)钻柱的挠度相对于其长度非常小;6)钻具各单元材料性质保持为常数;7)忽略钻井液施加于钻柱上的分布扭矩。
根据RSBHA的运动平衡方程、本构方程、几何方程及上述假设,可以得到RSBHA第i段钻柱单元的三维小挠度静力学微分方程组[17]:


式中:l为沿钻柱轴线的曲线坐标(以第i段钻柱的底端为起点),m;Ei为第i段钻柱的弹性模量,Pa;Ii为第i段钻柱的截面惯矩,m4;Mti为第i段钻柱所受扭矩,N·m;qwi为第i段钻柱在钻井液中单位长度的重量,N/m;αi为第i段钻柱所在井段的井斜角,rad;Ui为第i段钻柱在x方向的位移或坐标,m;Vi为第i段钻柱在y方向的位移或坐标,m;Fxi为第i段钻柱在x方向上的内力,N;Fyi为第i段钻柱在y方向上的内力,N;Bi为i段钻柱在下部z方向的压力,N;Lj为第j段钻柱的长度,m;Nj为第j段钻柱与井壁的接触压力,N;f为稳定器与井壁的摩擦因数;fa为稳定器与井壁的轴向摩擦因数;ft为稳定器与井壁的切向摩擦因数;v为钻速,m/s;w为钻柱自转角速度,rad/s;Do为钻柱外径,m。
上述微分方程组使用加权余量法求解较为方便快捷[17],令分段位移试函数为:

式中:aim,bim为第m次方项对应的系数;s为试函数项数,s≥4。
具体的边界条件参见文献[17]。这里将旋转导向工具偏置机构等效为偏心位移已知、导向力未知的偏心稳定器[18],可表示为:

式中:es为导向工具处偏心距,m;δs为导向工具处偏心方位角,rad;Xi,Yi分别为导向工具偏置机构处井眼轴线x,y方向的坐标;Li为第i段钻柱的长度,m。
偏心稳定器的偏心距和偏心方位角(即工具面角)如图2所示。
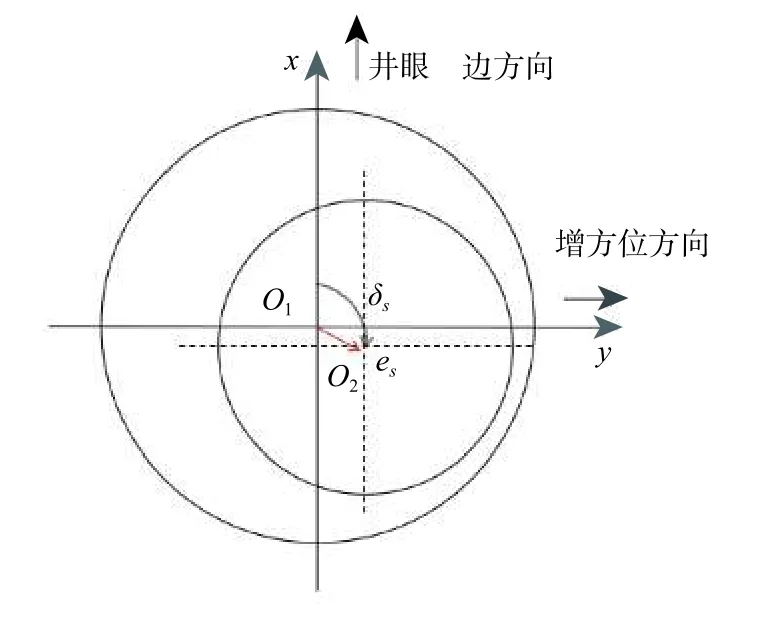
图2 偏心距与偏心方位角Fig.2 Eccentricity and eccentric azimuth
根据第i段梁的边界条件和连续条件,使用加权余量法和双重优化方法[17],可以求解出所有的系数aim,bim及上切点位置,从而确定RSBHA的空间构形。
2 RSBHA的动力学有限元模型
在井筒中,RSBHA的动力学运动微分方程可以表示为[16]:

式中:U为广义位移矢量,m;为广义速度矢量,m/s;为广义加速度矢量,m/s2;F为外力矢量,N;M为质量矩阵,kg;C为阻尼矩阵,N/(m·s-1);K为刚度矩阵,N/m。
式(9)考虑了钻井液对质量矩阵M的影响[19]和轴向力对刚度矩阵K的影响[20]。
钻柱自转引起的不平衡力或横向激励力F(t)为:

式中:F0为不平衡力或激励力的幅值,N;ω为钻柱转速,rad/s;ζ为频率放大系数,不平衡力对应的 ζ取1.0,推靠式PowerV对应的ζ取3.0;θ为外激励的初相位角,rad;t为时间,s。
式(9)的特征方程为:

式中:ν为RSBHA的固有频率,Hz;ψ为固有振型矩阵。
在得到固有振型ψ以后,引入坐标变换:

式中:q(t)为广义坐标矩阵,m。
式(9)可转化为:

式(9)中,阻尼C为Rayleigh阻尼:

式中:α,β为Rayleigh阻尼系数。
根据固有振型ψ关于质量矩阵和刚度矩阵的正交性及Rayleigh阻尼的性质[21],原方程可以解耦为主坐标下n1个独立的单自由度阻尼系统:

式中:Mk为模态质量,kg;Ck为模态阻尼,N/(m·s-1);Kk为模态刚度,N/m;Fk为模态力,N。
仿照单自由度阻尼系统的受迫振动稳态解,并将其写成矩阵形式,可得到RSBHA的稳态动力学响应:

式中:ξk为阻尼比;νk为固有频率;rk为频率比;θk为不同频率下的相位角,rad。
根据M. W. Dykstra[15]关于稳定器处边界条件对BHA模态响应影响的研究,可将稳定器当作有限元节点处理,并设为简支边界条件。根据假设,切点以上RSBHA位于下井壁,井壁限制了钻柱的横向位移,因此上切点处的边界条件设为简支边界条件,但不能忽略上切点以上钻柱轴向力的影响[20]。对于静态推靠式旋转导向工具,其工作时的偏心距、偏心方位角一般为恒定值,限制了钻柱的横向位移,因此将导向工具处当作有限元节点处理,并设为简支边界条件。在弹性力学范畴内,变形非常小的初始条件基本不会对动态位移产生影响,因此进行动力学分析时认为初始时刻钻柱的动态位移为0。考虑井壁对RSBHA的约束,其主要通过影响外力矩阵的形式对有限元结果产生影响,需要对式(19)表示的稳态响应进行修正[22]:

式中:F*为接触恢复力,N。
第 η个节点处的接触恢复力F*的计算公式为:

式中:U0η为超出井壁间隙的第η个节点位移,m;Rη为第 η个节点处的井壁间隙,m;urη为第r阶振型中第 η个节点的振幅,m。
3 实例分析
基于以上模型,利用MATLAB开发了相关程序,并进行了案例分析。以φ172.0 mm静态推靠式旋转导向工具为例,采用如下RSBHA结构进行分析:φ215.9 mm钻头+φ172.0 mm静态推靠式旋转导向工具+φ172.0 mm钻铤+φ213.0 mm稳定器+φ172.0 mm钻铤+φ127.0 mm柔性短节+φ172.0 mm钻铤+φ213.0 mm稳定器+φ172.0 mm钻铤,其中L11=1.20 m,L1=3.60 m,L21=1.00 m,L2=9.00 m;钻铤内径为71.4 mm。旋转导向工具正常工作时,伸缩块直径最小为203.0 mm,直径最大可达231.9 mm。计算时不考虑井径扩大的影响,旋转导向工具处的偏心距为0~10.0 mm;施工钻压为80.0 kN,转速为100 r/min,钻井液密度为1 200 kg/m3;柔性短节长度为1.20 m,弹性模量为117.31 GPa;井眼直径为215.9 mm,井斜角为45.0°,井眼曲率取0°/30m和3.0°/30m。
3.1 RSBHA的静态构形及动态响应
3.1.1 斜直井眼
RSBHA在斜直井眼中的静态构形是研究其动态响应的基础。利用加权余量法求得的RSBHA静态构形如图3所示(图3中,3条黑色虚线从左到右依次表示静态推靠式旋转导向工具、第一稳定器和第二稳定器的位置,下同;黑色实线表示井眼的轴线,上下2条红线表示考虑钻具外径与井壁间隙后井壁所在的等效位置,蓝线表示钻具的横向位移;当红色曲线与蓝色曲线相切时,表示RSBHA与井壁相接触)。计算时采用的偏心距为2.0 mm,偏心方位角为180.0°。从图3可以看出,RSBHA在L3=22.10 m处与井壁开始相切,即第二稳定器到最近上切点的距离为22.10 m,后续动力学分析的有效长度约为34.70 m。

图3 斜直井眼中RSBHA的静态构形Fig.3 Static configuration of RSBHA in a slant hole
以静态构形为基础,利用有限元方法对RSBHA进行模态分析。网格划分时,钻头到下稳定器之间的梁单元长度取0.40 m,近钻头稳定器到柔性短节左端点之间的梁单元长度取0.50 m,柔性短节左端点到上稳定器之间的梁单元长度取0.40 m,上稳定器距上切点之间的梁单元长度取0.50 m (根据静力学计算的切点位置灵活调整最后一段梁单元长度)。RSBHA的前5阶固有振型如图4所示,可以看出前5阶振型的差异较大。
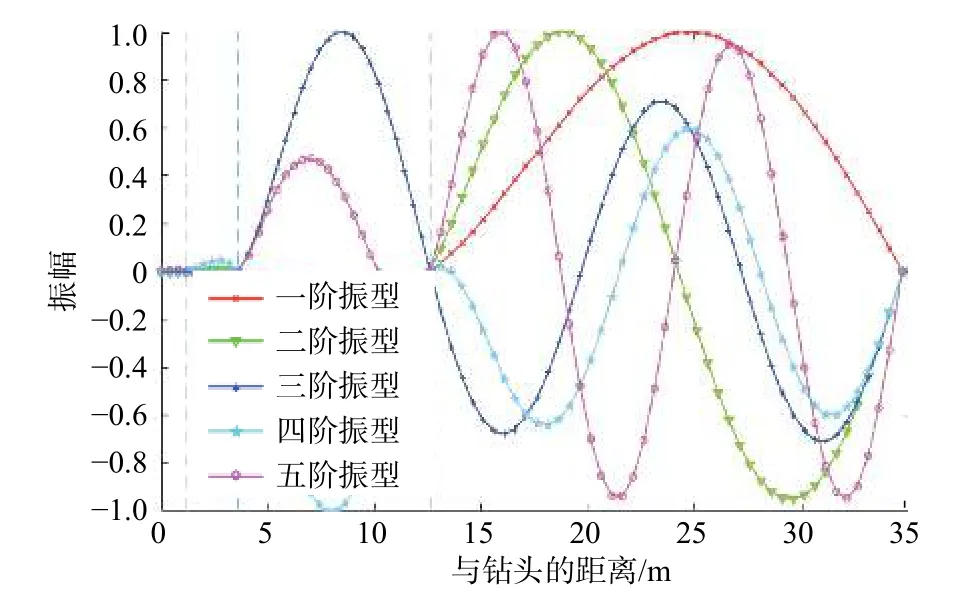
图4 斜直井眼中RSBHA前5阶固有振型Fig.4 First five order natural modes of RSBHA in a slant hole
钻压为80 kN、转速取60~150 r/min时,RSBHA的动态位移响应如图5所示。从图5可以看出,RSBHA的动态位移在4个位置(与钻头的距离分别为8.20,18.10,24.60和31.60 m)处较大,分别对应钻铤3左部、钻铤4左部、钻铤4中部和钻铤4右部;由于旋转导向工具的作用,钻头到下稳定器之间钻铤段(0~3.60 m)的动态位移响应较小,转速增大对其影响较小;2个稳定器之间钻铤段(3.6 0~12.60 m)的动态位移响应,转速为60~90 r/min时较小,转速为100~150 r/min时随转速增大先增大后减小,并在转速为140 r/min时达到最大;上稳定器与上切点之间钻铤段(12.60~34.70 m)的动态位移响应与2个稳定器之间的钻铤段相似,也在转速为140 r/min时达到最大。

图5 斜直井眼中RSBHA的二维动态位移响应Fig.5 2D dynamic displacement response of RSBHA in a slant hole
以2 r/min为间隔计算RSBHA的动态位移响应,并绘制得到三维动态位移响应图(见图6)。从图6可以看出,转速约为138 r/min时的动态位移较大,即RSBHA的临界转速接近138 r/min,动态位移的最大值出现在2个稳定器之间的钻铤段(3.60~12.60 m)。结合图5可知,RSBHA动态位移的最大值出现在距钻头8.20 m处,其他较大值出现在距钻头18.10,24.60和31.60 m处。
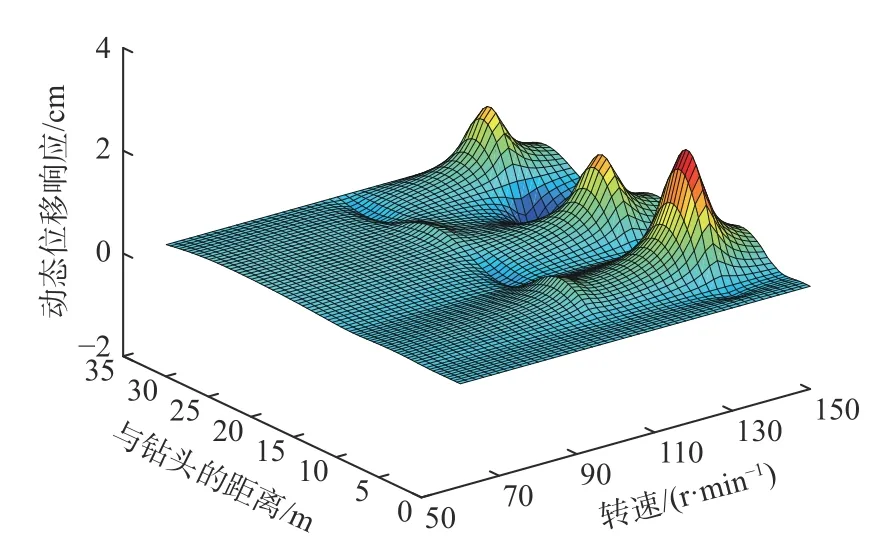
图6 斜直井眼中RSBHA的三维动态位移响应Fig.6 3D dynamic displacement response of RSBHA in a slant hole
为了更好地分析转速和钻压对RSBHA弯曲应力的影响,定义危险系数:

其中

式中:λς为第 ς组工作参数(钻压、转速)对应的危险系数;σς为第 ς组工作参数(钻压、转速)对应的RSBHA的最大弯曲应力,MPa;n2为工作参数的总组数;σmax为n2组工作参数对应最大弯曲应力的最大值,MPa。
RSBHA在不同工作参数配合下的危险系数云图如图7所示。
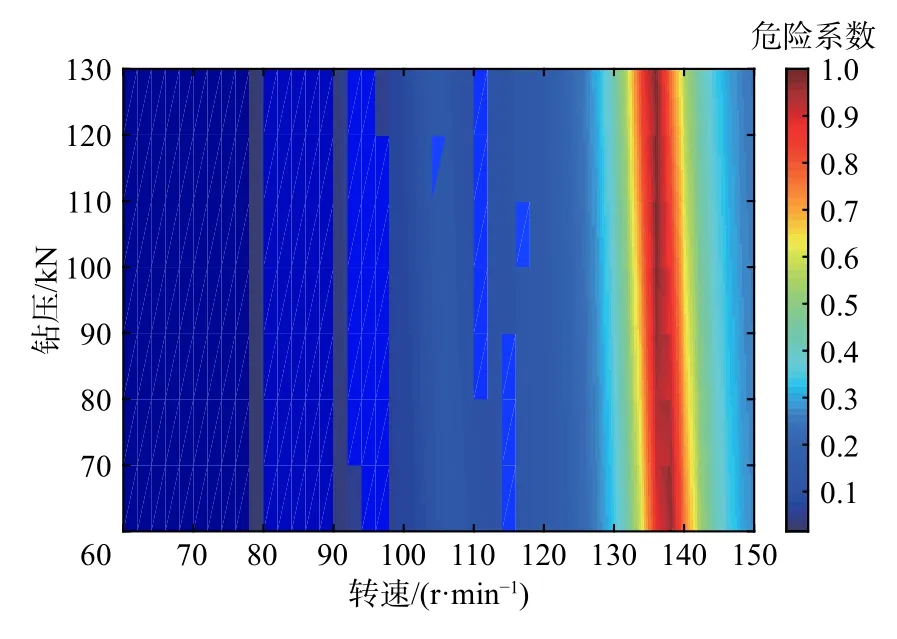
图7 斜直井眼中RSBHA的危险系数云图Fig.7 Risk coefficient of RSBHA in a slant hole
从图7可以看出:在转速60~150 r/min和钻压60~130 kN的区间,转速138 r/min对应的危险系数最大,说明施工时应尽量避免此转速;而且随着钻压增大,红色区域向左偏斜,表明钻压增大使临界转速降低,但这种影响较小。
3.1.2 弯曲井眼
采用类似的方法,可得RSBHA在弯曲井眼中的静态构形、动态响应和危险系数,结果见图8—图10,弯曲井眼的曲率为3.0°/30m。为便于比较,偏心距也设为2.0 mm,偏心方位角设为180°。

图8 井眼曲率为3.0°/30m时RSBHA的静态构形Fig.8 Static configuration of RSBHA at a hole curvature of 3.0°/30m
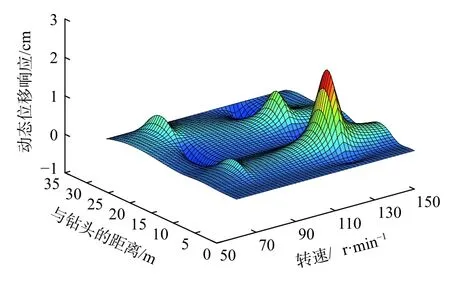
图9 井眼曲率为3.0°/30m时的RSBHA动态位移响应Fig.9 Dynamic displacement response of RSBHA at a hole curvature of 3.0°/30m

图10 井眼曲率为3°/30m时RSBHA的危险系数Fig.10 Risk coefficient of RSBHA at a hole curvature of 3.0°/30m
从图8可以看出,在L3=17.70 m处钻铤与井壁相切,即动力学分析的有效长度为30.30 m。与图3相比,由于井眼弯曲,钻铤与井壁切点下移,动力学分析有效长度缩短了。
RSBHA在弯曲井眼中的动态位移响应如图9所示,可以看出,转速为126 r/min时的动态位移较大,即RSBHA的临界转速接近126 r/min,动态位移的最大值出现在2个稳定器之间的钻铤段;与图6相比,临界转速有所下降。另外,RSBHA在弯曲井眼和斜直井眼中的动态位移响应规律具有相同的趋势,因此下面仅分析斜直井眼中的偏心距和偏心方位角的影响规律。
3.2 偏心距的影响
RSBHA工作中主要通过调节导向翼肋上作用力的大小来控制钻头上作用力的方向和大小,这个过程可以等效为改变伸缩块所在位置的偏心距和偏心方位。取偏心方位角为135°,可以求得不同偏心距(0~10.0 mm)对应的RSBHA横向振动的前10阶模态,其中前5阶的固有频率随偏心距的变化如图11所示。从图11可以看出,同一偏心距下,RSBHA固有频率随着模态阶数的增大而升高,并且偏心距越大,升高速度越快;同阶固有频率随偏心距增大而升高,并且模态阶数越高,升高速度越快。

图11 偏心距对RSBHA固有频率的影响Fig.11 Effect of eccentricity on the natural frequency of RSBHA
由于RSBHA空间构形随偏心距改变而变化,因而其最大弯曲应力的位置也不固定。偏心距对RSBHA上最大弯曲应力的影响结果如图12所示。从图12可以看出:最大弯曲应力的最大值与最小值的差为33.4 MPa,说明偏心距对最大弯曲应力的影响较大;偏心距为0~2.0 mm时,最大弯曲应力出现比较大的波动,且偏心距为0.9 mm时,转速的频率和RSBHA的二阶固有频率较为接近,最大弯曲应力达到45.7 MPa;偏心距为2.0~10.0 mm时,最大弯曲应力逐渐减小,变化比较平缓。即对于给定的RSBHA,可能存在一个特定的偏心距,使其处于共振状态,继而诱发较大的弯曲应力。

图12 偏心距对RSBHA最大弯曲应力的影响Fig.12 Effect of eccentricity on the maximum bending stress of RSBHA
3.3 偏心方位角的影响
在钻井过程中,可以根据钻井作业需求灵活调整RSBHA的工具面角(即偏心方位角)。设偏心距为4.0 mm,分析RSBHA横向振动固有频率随偏心方位角的变化,其中偏心方位角对前5阶固有频率的影响规律如图13所示。

图13 偏心方位角对RSBHA各阶固有频率的影响Fig.13 Effect of eccentric azimuth on each natural frequency of RSBHA
从图13可以看出:偏心方位角对固有频率有较大影响,而且所有曲线关于偏心方位角180°近似对称;同一偏心方位角下的固有频率随着模态阶数增大而升高。偏心方位角为0°~60°时,固有频率随偏心方位角增大而升高;偏心方位角为60°~90°时,固有频率随偏心方位角增大而降低;偏心方位角为90°~180°时,固有频率随偏心方位角增大而升高。偏心方位角为90°和270°时,井眼高边方向上的位移偏移量为0, RSBHA在高边方向上居中,此时切点到上稳定器距离L3较大(约77.90 m),使RSBHA 固有频率明显低于其他偏心方位角,固有频率的升高速度也明显变小。特别是,当多个固有频率对应的转速处于实际转速工作区间内(如9 0°时RSBHA前8阶固有频率对应的转速分别为3.6,13.2,28.2,49.8,76.8,109.8,148.2和192.0 r/min),易引发共振现象,使最大弯曲应力增大。
不同偏心方位角对应的RSBHA横向振动最大弯曲应力如图14所示。从图14可以看出:偏心方位角为0°~60°时,最大弯曲应力变化较小;偏心方位角为60°~90°时,最大弯曲应力随偏心方位角增大而增大,并在9 0°达到最大;偏心方位角为90°~180°时,最大弯曲应力随偏心方位角增大而减小;偏心方位角为180°~360°时,其规律与0°~180°时的结果关于180°对称,且弯曲应力在偏心方位角为270°时达到最大。由此可知,偏心距一定时,偏心方位角对最大弯曲应力的影响较大。
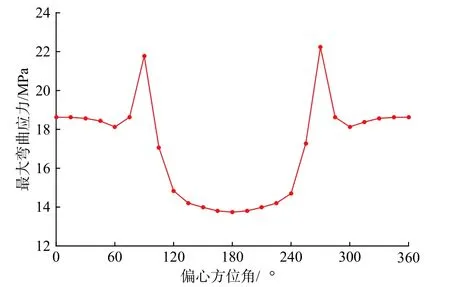
图14 偏心方位角对RSBHA最大弯曲应力的影响Fig.14 Effect of eccentric azimuth on the maximum bending stress of RSBHA
4 结论与建议
1)旋转导向工具在控制井眼轨迹时,其所在位置的等效偏心距和偏心方位角发生改变时,影响RSBHA的空间构形,继而影响横向振动特征。对于文中所用RSBHA结构,较大的横向振幅主要位于2个稳定器之间的钻铤段。
2)对于给定的RSBHA结构和钻压,存在特定的偏心距和偏心方位角,使其在某个转速附近发生共振,危险系数急剧增大。建议通过求解RSBHA横向振动固有频率,避开临界转速。
3)偏心距一定时,偏心方位角对RSBHA的横向振动特征有很大影响,且关于180°对称。当偏心方位角取90°和270°时,多阶共振频率较接近,且其对应转速位于现场常用转速区间范围内。因此,在进行强力扭方位作业时,应注意RSBHA共振造成的影响。
猜你喜欢
化工设备与管道(2022年1期)2022-06-08
石油机械(2022年5期)2022-05-10
武汉科技大学学报(2022年2期)2022-01-14
发明与创新·中学生(2020年6期)2020-06-22
钻采工艺(2020年2期)2020-06-04
中国石油大学学报(自然科学版)(2020年2期)2020-04-25
中国外汇(2019年19期)2019-11-26
中国石油大学学报(自然科学版)(2018年2期)2018-05-18
电子制作(2017年24期)2017-02-02