
虚假数据注入攻击下的自适应补偿控制
2021-01-08 05:33李小杭张志虎宋春林吴强董方勇
兵工学报 2020年11期
李小杭, 张志虎, 宋春林, 吴强, 董方勇
(北方信息控制研究院集团有限公司 信息总体部, 江苏 南京 211100)
0 引言
随着物联网、传感器网络、嵌入式系统和计算智能等技术的发展,信息世界和物理世界的交互、协同和融合在不断加强,信息物理系统(CPS)作为一种新型智能系统应运而生。
CPS是指把分布于不同位置的控制器、执行器、传感器和被控对象通过网络连接起来,形成一种闭环的分布式反馈控制系统,其结构图如图1所示。近年来,CPS的研究被持续关注,取得了一系列很有意义的研究成果,已经逐渐成为国际控制领域的一个研究热点[1]。
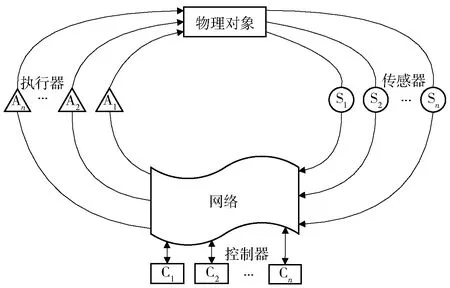
图1 CPS 基本结构Fig.1 Basic structure of cyber-physical system
随着CPS的迅速发展,由此而产生的安全问题对社会所产生的危害也越来越大。例如,德国政府于2011年11月公布了《高技术战略2020》,其中一项重要战略就是工业4.0,其核心之一是通过CPS创新制造方式,实现“智能工厂”。我国在党的十八大报告中突出强调CPS的重要性,指明“推动信息化和工业化深度融合,加快传统产业转型升级”的发展方向。此外,2012年,破坏力十分巨大的“火焰”病毒在中东地区广泛传播,对石油工业等重要控制系统的正常运行造成了极其严重的冲击[2]。虚假数据注入攻击是一种特殊类型的攻击,最初应用于智能电网[3]。
虚假数据注入攻击是一种意图破坏系统稳定性且保持针对检测机制隐身性的攻击。针对智能电网中的虚假数据注入攻击,文献[4-6]做了一系列研究。Mo等通过系统模型的特征值,设计了一种针对控制系统中传感器的虚假数据注入攻击,破坏系统稳定性且避开了卡方检测器的检测[7]。文献[8]研究了几类传感器与执行器虚假数据注入攻击的情况,并设计了在执行器和传感器同时进行攻击情况下完全消除对检测器摄动的方法。在此基础上,文献[9-10]通过可达性理论,以攻击者角度分析了在虚假数据注入攻击下的系统状态可达域。这种攻击对模型知识精确程度的要求程度高,但可造成系统不稳定。
容错控制研究在系统执行器和传感器发生故障时仍能保证系统稳定性并尽可能保证系统性能。文献[11]针对执行器失效故障,研究了重构控制器的自适应容错控制策略。文献[12]研究了在执行器存在失效、卡死和中断故障情况的直接自适应容错控制问题。Hao等又针对带有量化现象和执行器故障的网络控制系统,利用积分滑模方法设计了容错控制器[13]。这类容错控制方案对于受到数据攻击的CPS控制问题具有深远影响。例如,文献[14]应用线性矩阵不等式(LMI)技术设计了拒绝服务(DoS)攻击下的补偿机制。文献[15-16]应用自适应方法补偿了系统中存在的数据攻击。文献[17]考虑了动态解决虚假数据注入攻击的解决问题。文献[18]针对履带式装甲车在受到干扰下的自适应控制问题进行了研究。
针对CPS中的虚假数据注入攻击问题,国内外学者展开了相关研究工作,然而尚未见到考虑系统具有自适应补偿控制器时虚假数据注入攻击对系统性能指标影响的报道。本文在系统具有自适应补偿控制器的情况下,攻击者向系统发起常值虚假数据注入攻击以及有界时变虚假数据注入攻击信号时,开展了系统的动态情况分析。主要研究工作包括以下两个方面:
1) 研究系统具有自适应补偿器且虚假数据注入攻击的攻击信号为常值信号时,自适应补偿控制方法对系统性能指标的影响。
2) 研究系统具有自适应补偿控制器且虚假数据注入攻击的攻击信号为有界时变值信号时,自适应补偿控制方法对系统性能指标的影响。
本文的主要创新点为:针对CPS中的虚假数据注入攻击,提出一种新型自适应补偿控制器,以保证攻击者成功注入虚假数据后系统仍然能够稳定运行并保持良好的动态性能。
1 问题描述
线性连续时不变系统遭受虚假数据注入攻击时,网络攻击的系统结构如图2所示。图2中包括系统控制器和执行器,由控制器对执行器发出控制指令u(t),由控制器到执行器的过程使用无线网络进行数据发送。在CPS中,攻击者可以攻击无线网络来拦截和修改控制器发送的数据,从而对系统进行破坏,攻击信号为a(t)。

图2 虚假数据注入攻击下的系统结构Fig.2 Structure of system under false data injection attack
1.1 系统模型

(1)
y(t)=Cx(t)+υ(t),
(2)
式中:x(t)∈Rn为状态空间向量,n为维度;u(t)∈Rn为控制输入向量;y(t)∈Rm为传感器的测量向量,m为维度;υ(t)∈Rm为传感器有界外部测量噪声;初始状态x0=0;A为适当维度的系统矩阵;B为适当维度的输入矩阵;C为适当维度的输出矩阵。针对此类控制系统的特点,本文引入现代控制理论中的下列假设来进行分析:
假设1:(A,B)是完全可控的。
假设2:(A,C)是完全可观测的。
假设3:系统正常运行或受到有界虚假数据注入攻击。
1.2 针对执行器的虚假数据注入攻击模型
为了规划自适应补偿控制问题,需要建立针对执行器的虚假数据注入攻击模型:

(3)
y(t)=Cx(t)+υ(t),
(4)
1.3 研究问题
针对线性时不变连续系统中执行器受到虚假数据注入攻击的情况,本文研究如何运用自适应控制方法的补偿器,保证攻击者成功注入虚假数据后系统仍然能够稳定运行,动态特性良好的问题。
2 自适应补偿控制器设计
本文研究在系统受到常值和有界时变虚假数据注入攻击情况下系统带有自适应补偿控制器的系统动态性能。首先定义攻击策略,然后设计针对不同虚假数据注入攻击的自适应补偿控制器。
2.1 常值攻击情况下的自适应补偿控制
类似于现有文献[6]中的攻击模型,本文假设攻击者能够拦截和修改传输与执行器相关的数据[6],定义控制输入为
u(t)=Kx(t)-(t),
(5)
式中:K为反馈控制增益矩阵。自适应控制律为
(6)
式中:P为n×n维正定矩阵。
定理1考虑执行器受攻击系统(3)式,在控制器(5)式和自适应律(6)式的作用下,能够保证最终闭环系统的所有信号是有界的并且状态能渐近收敛到0.
证明鉴于(A,B)完全能控,存在正定矩阵P∈Rn×n,使得P(A+BK)+(A+BK)TP<0成立。为方便表示,不妨令P(A+BK)+(A+BK)TP=-Q,其中Q为正定矩阵,则

(7)
(8)
由此可以看出本文设计
(9)
的自适应律即可实现控制目标。证毕。
2.2 有界时变攻击情况下的自适应补偿控制
本节考虑有界时变攻击情况下针对执行器攻击的自适应补偿控制方法。首先,将有界时变攻击信号设置上界,即转化为与2.1节常值情况下虚假数据注入攻击类似的情况进行分析。最后,证明在受攻击的系统满足定理2条件下可以使系统状态收敛到0,实现受攻击以后系统动态性能良好的目标。
考虑带有有界扰动情况下的下列系统:
(10)
y(t)=Cx(t)+υ(t),
(11)


(12)
考虑在攻击‖a(t)‖≤b,b为未知正常数值情况下的系统,‖a(t)‖为a(t)的范数,可以得到

(13)
由于‖a(t)‖≤b,Fω(t)有界,不妨令a(t)+Fω(t)≤k,其中k为需要估计的未知参数。因此,定义控制输入信号
u(t)=Kx(t)+u1(t),
(14)
式中:u1(t)为自适应补偿控制器控制输入,
(15)
(16)
定理2考虑执行器受攻击系统(13)式,在控制器(14)式、(15)式和自适应律(16)式的作用下,能够保证最终闭环系统的所有信号是有界的,并且状态能渐近收敛到0.
证明鉴于(A,B)完全能控,存在正定矩阵P∈Rn×n,使得P(A+BK)+(A+BK)TP<0成立。为方便表示,不妨令P(A+BK)+(A+BK)TP=-Q. 构造李雅普诺夫方程:
(17)
对其求导,可以得到

(18)

(19)


(20)
(21)

3 仿真实例
为了论证针对虚假数据注入攻击的自适应补偿控制方法的有效性,在此引用文献[18]中的参数作为仿真实例。本文考虑一个2阶系统,其中动态模型如下:

(22)
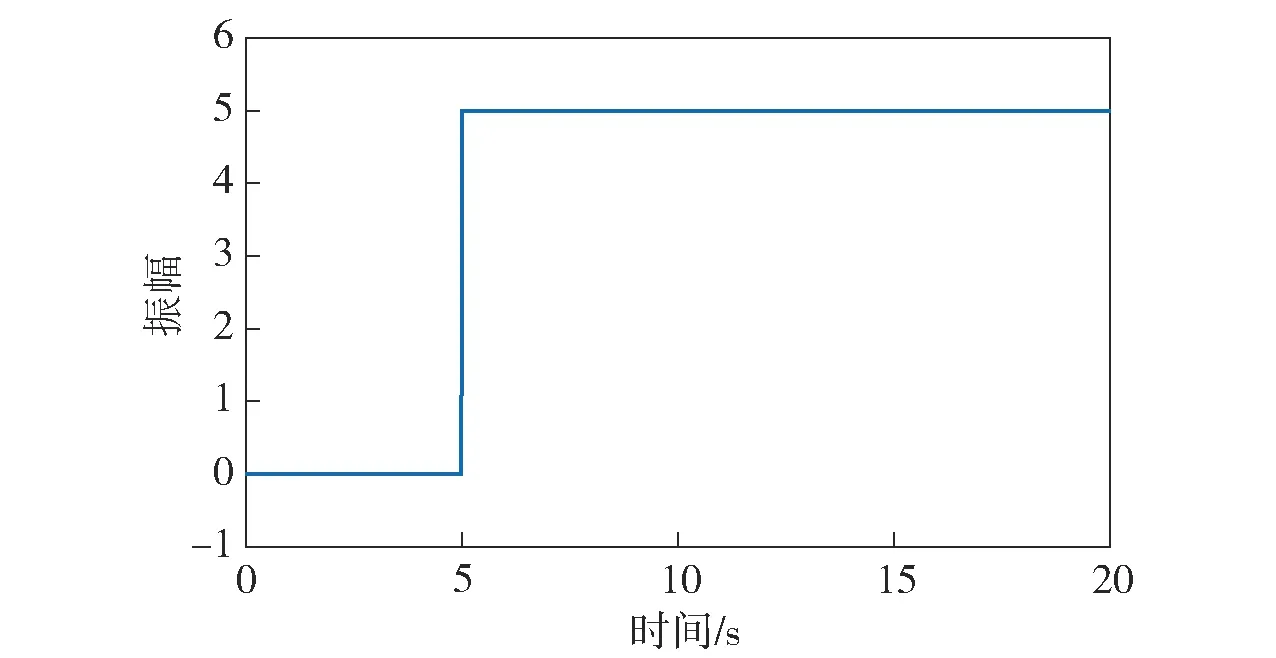
图3 常值攻击信号Fig.3 Constant attack signal
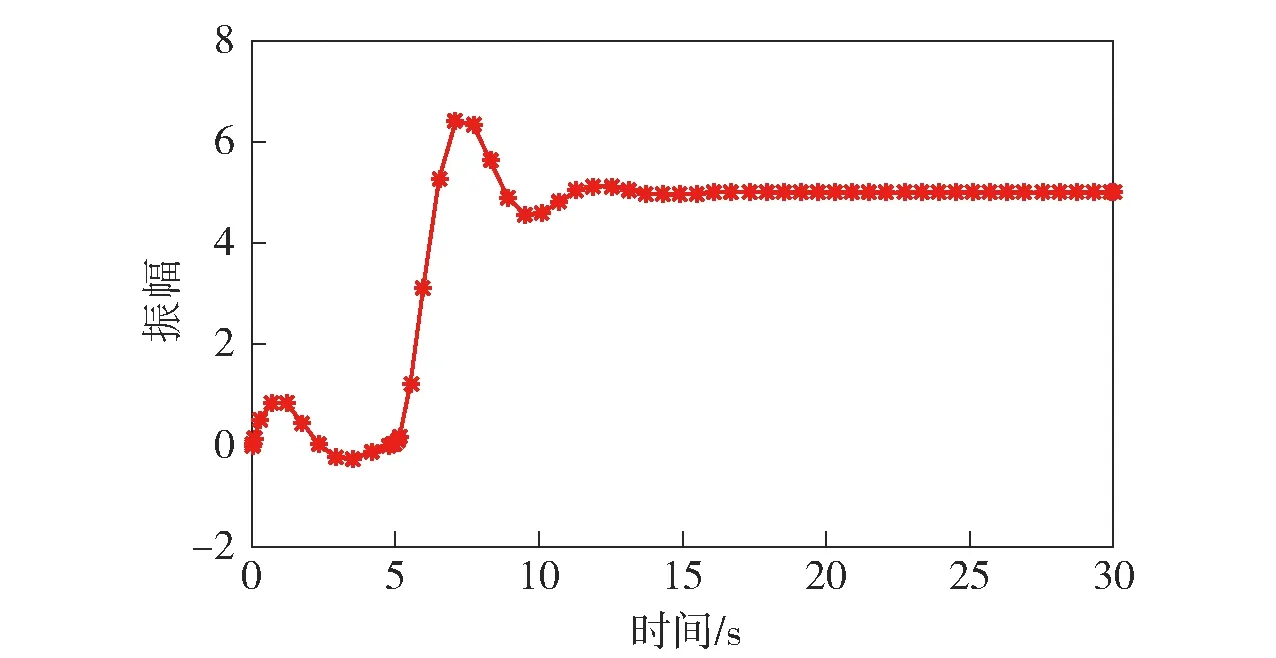
图4 常值攻击信号估计值Fig.4 Estimation of constant attack signal
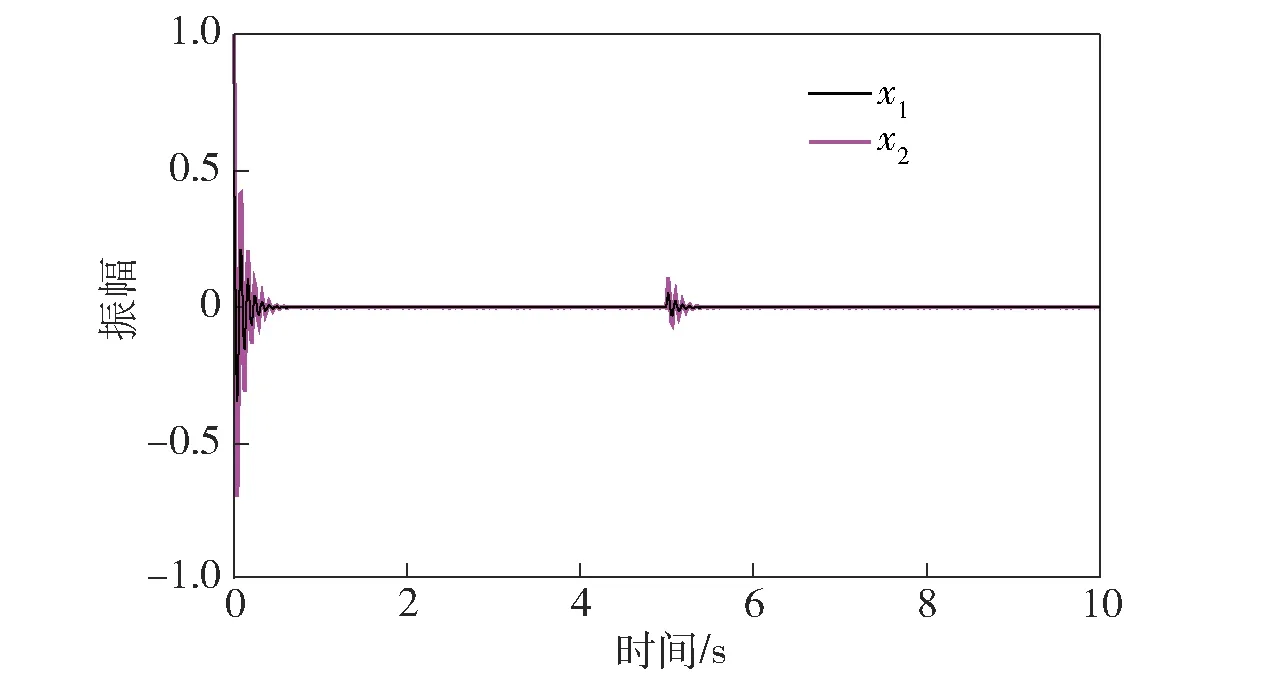
图5 自适应控制下的系统状态响应曲线Fig.5 Response curves of system state under the adaptive control
当系统执行器受到有界时变虚假数据注入攻击‖a(t)‖=3×exp(-t/5)时,仿真结果如图6~图8所示。其中:图6是系统运行5 s后有界时变虚假数据注入攻击信号图像;图7显示了应用自适应补偿控制器后系统对攻击信号的估计值,从中可以看出系统在13 s以后(即攻击运行8 s后)系统估计的攻击信号值始终比实际值大,这与本文提出的理论方法一致;图8显示了应用自适应补偿控制器后系统状态的动态变化,从中看出系统在运行13 s以后(即攻击运行8 s后)系统的状态渐进收敛为0,自适应补偿控制效果良好。
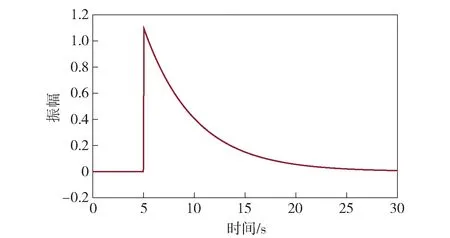
图6 有界时变攻击信号Fig.6 Attack signal with bounded boundry

图7 有界时变攻击信号估计Fig.7 Estimation of bounded time-varied attack signal
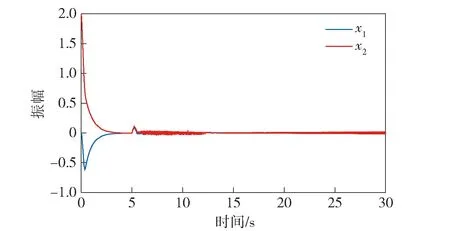
图8 自适应控制下的系统状态响应曲线Fig.8 Response curves of system state under the adaptive control
4 结论
本文主要研究了系统执行器在受到常值虚假数据注入攻击与有界时变虚假数据注入攻击时的自适应补偿控制器设计方法。根据自适应机构提供的在线估计信息,构造自适应补偿控制器,用于抵消虚假数据注入攻击产生的偏差,并采用Barlalat引理对该自适应律的收敛性给予了严格的数学证明。该自适应补偿控制算法应用到虚假数据注入攻击中,结果表明:所设计的自适应律具有收敛速度快、估计参数准确等优点;该补偿控制算法能够基本上补偿虚假数据注入攻击产生的影响,证明最终的闭环系统所有信号是有界的,并且系统状态能够渐近收敛到0.
猜你喜欢
液压与气动(2022年10期)2022-11-27
电工技术学报(2022年20期)2022-10-29
汽车实用技术(2022年15期)2022-08-19
建材发展导向(2021年15期)2021-11-05
大众投资指南(2020年10期)2020-07-24
阅读与作文(英语初中版)(2019年11期)2019-09-10
汽车维修技师(2019年2期)2019-08-23
软件(2017年9期)2018-03-02
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
