基于复合MPC算法的风电机组降载控制
2021-01-14 05:14陈忠雷
农业工程学报 2020年21期
田 德,陈忠雷,邓 英
基于复合MPC算法的风电机组降载控制
田 德,陈忠雷,邓 英
(华北电力大学新能源电力系统国家重点实验室,北京 102206)
随着风电机组单机容量的不断增大,风电机组的关键部件承受的载荷也越来越大,对风电机组可靠性的要求也越来越高,因此,要求风电机组控制策略与技术,既能实现功率优化控制,又能实现降载控制。研究基于模型预测控制(Model Predictive Control,MPC)理论,设计了一种基于风电机组多控制目标的运行区间划分方法的风电机组复合模型预测控制(Multi Model Predictive Control,Multi MPC)控制器。首先建立基于Matlab和TUV GL bladed的联合实时仿真平台,将MPC控制器与传统PI控制器进行对比分析,并以DUV GL Bladed软件中2 MW双馈式风电机组非线性模型作为研究对象,对Multi MPC控制器、MPC控制器和传统的比例积分微分(Proportional Integral Differential,PID)控制器进行了降载控制仿真分析。研究结果表明,Multi MPC控制器能够减小风电机组转速波动幅度,抑制转速超调量,降低传动链的载荷;能够抑制桨距角的波动幅度和变化速率,降低变桨距机构的运行载荷,提高机组运行可靠性。
模型;控制算法;风电机组;降载控制器
0 引 言
2019年全球新增风电装机容量为60.4 GW,较2018年增长19%,风电在全球总电力供应中占的比重也逐年上升[1]。风电机组是将自然风中的动能转化为电能的设备[2]。自然风具有很强的波动性,主要体现在风速范围宽、风扰动大、非线性等方面[3],其作用于风电机组,易造成风电机组变桨距系统和传动链系统载荷突变[4]。随着单机容量不断提升,风电机组变桨距和传动链系统的载荷控制技术也越来越受到相关科研与技术人员的高度重视[5]。
主动载荷控制减少了风电机组的机械振动,提高了风电机组零部件的寿命,在设计了更轻、更灵活部件的同时,也降低了全球风电机组的建设成本[6]。传统的比例积分微分(Proportional Integral Differential,PID)控制具有稳定、高效和安全等特点,已经成为当前常用的控制策略[7]。Eduardo等介绍了一种基于变桨距控制系统的风电机组塔架载荷主动控制系统的研制[6]。但传统的PID控制策略只能在特定线性模型的工作点附近具有良好的控制效果,不能很好地对湍流风等强非线性载荷进行抑制[8]。因此,有必要研究一种非线性、变参数的智能降载控制算法。
模型预测控制(Model Predictive Control,MPC)是一种能处理非线性大时滞系统的控制算法[9]。MPC不同于其他控制算法,它是一种有限的时域滚动优化控制策略,具有对模型的精度要求不高,建模方便容易;系统鲁棒性、稳定性较好;动态性能较好;易应用于有约束、大迟延、非最小相位、非线性等实际过程的特点[10]。
变桨距控制系统在风电机组的控制过程中起着决定性的作用[6]。叶杭冶在专著中介绍了模型预测控制原理[11]。Liu 等提出了一种风电机组预测控制策略,降低风电机组叶片的负荷[12]。曹松青等提出了一种基于MPC的独立变桨据控制策略[13]。朱江生等提出了一种MPC控制策略,以减小风轮不平衡载荷[14]。陈振宇等通过参数相关性分析,提取载荷特征参数,进行基于模型预测控制的载荷-功率双目标协调优化[15]。沈坤等基于改进的有限控制集FCS-MPC算法,分别构建了转子侧变流器(RSC)与GSC-MPC算法[16]。孟洪民等针对额定风速以上区间,提出一种多目标模型预测控制策略[17]。张靖等提出了基于状态空间的双馈风力发电机模型预测控制方法[18]。刘兴杰提出一种在全风速范围内基于状态空间模型的有功功率多模型预测控制方法[19]。刘兴杰等通过将机组模型进行分段局部线性化,提出全风速范围内的有功功率多模型预测控制策略[20]。上述文献中对MPC技术的研究已经取得一定的成果,但研究大多考虑将整个风速区间当作一个运行域对风电机组进行MPC技术研究,并未将整个风速区间分为互不重叠的区间进行MPC控制和分析。对控制算法的仿真验证也多单独使用Matlab或SPCAD软件,并未采用专业的TUV GL Bladed软件与Matlab软件建立联合仿真系统。
本文在对风电机组MPC技术应用研究的基础上,设计了一种风电机组复合模型预测控制(Multi Model Predictive Control,Multi MPC)控制器。基于Matlab和TUV GL Bladed软件接口的风电机组降载控制联合实时仿真平台,与传统的PID控制器、MPC控制器进行仿真比较,验证Multi MPC控制器对降低风电机组运行载荷的有效性。
1 风电机组建模
针对降载控制的研究,建模主要考虑风轮系统、变桨距系统和传动链系统3个方面[21]。
1.1 风轮系统
单位时间内流经风轮所吸收的风能为

式中为上流经风轮处的风速,m/s;为风轮扫掠面积,m2;为单位时间内流过单位面积的空气质量,kg;为空气密度,kg/m3;C为风能利用系数。
1.2 变桨距系统
变桨载荷由变桨系统惯性和叶片轴承摩擦力矩2部分构成。轴承的摩擦力是由与变桨速度成比例的部分和常量部分构成的。变桨电机运行在线性区域时,变桨系统的动态性能可用一阶滞后传递函数描述[22-23]。
1.3 传动链系统
传动链系统的运动方程可以用1个主轴扭转的二阶微分方程表示[24]。若风轮和发电机之间刚性连接,运动方程可以简化为一个风轮转速的一阶微分方程
式中J为主轴低速侧总的转动惯量,kg·m²;ω为风轮的转速,rad/s;T为气动转矩,N·m;T为气动转矩损失,N·m;T为电磁转矩,N·m。
2 模型预测控制
2.1 模型预测控制原理
模型预测控制系统模型可表示为
由、、、定义工作点状态,状态空间结构是给定非线性系统模型线性化模型矩阵[25],其中、、分别为输入、输出和状态变量。
将公式(3)中输入、状态和输出变为时间时的输入向量()、状态向量()和输出向量(),得到
2.2 风电机组MPC算法
2.2.1 目标函数
风电机组的控制目标是在扰动超过额定风速后,通过优化桨距角的控制,来减小桨距角运行轨迹与额定之间的差异。目标函数如式(5),表示被控执行机构预测输出与期望目标之间的累积误差[8]。优化函数值越小,控制器的性能越好,对动态载荷的抑制能力越强。

式中为预测的时域;κ为速度要求的权重;κ为桨距角要求的权重;Δβ为桨距角变化量需求的权重;e为时间时变桨电机执行速度与目标设定点速度的偏差;e为时间时叶片桨距角的要求和目标设定点的偏差;Δβi为时间时叶片变桨角要求的变化量和目标设定点的偏差。
2.2.2 约束条件
根据TUV GL Bladed软件中2 MW双馈式风电机组的参数约束条件,变桨距控制高于额定风速时应满足以下约束

3 控制器设计
分别设计MPC控制器和Multi MPC控制器,并与PI控制器进行对比分析。
3.1 变桨距PI控制器
目前主流的风电机组控制算法是PI控制算法,PI参数是指风电机组在特定时刻的运行参数经过调整和优化后,变桨距PI控制器对风电机组进行运行控制。基于PI控制算法的控制器结构如图1所示[26]。
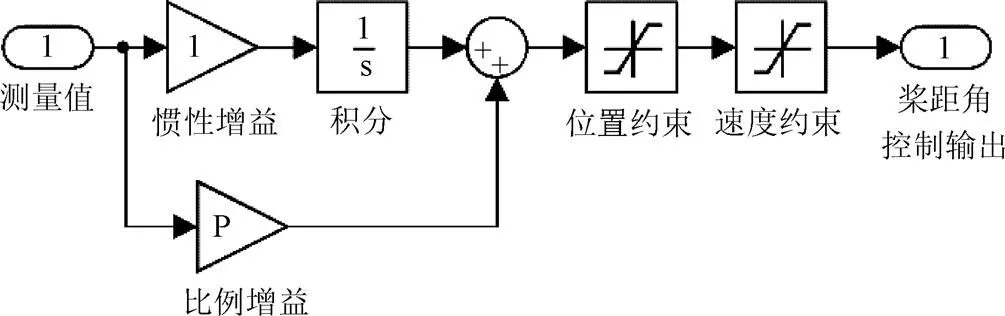
图1 PI控制器结构图
3.2 MPC控制器
设计基于状态空间的MPC控制器如图2所示。控制器输入是发电机实际转速与额定转速之间的差值,控制变量是对桨距角绝对值的要求。经过参数调整和优化,得到了变桨距MPC控制器的输出。
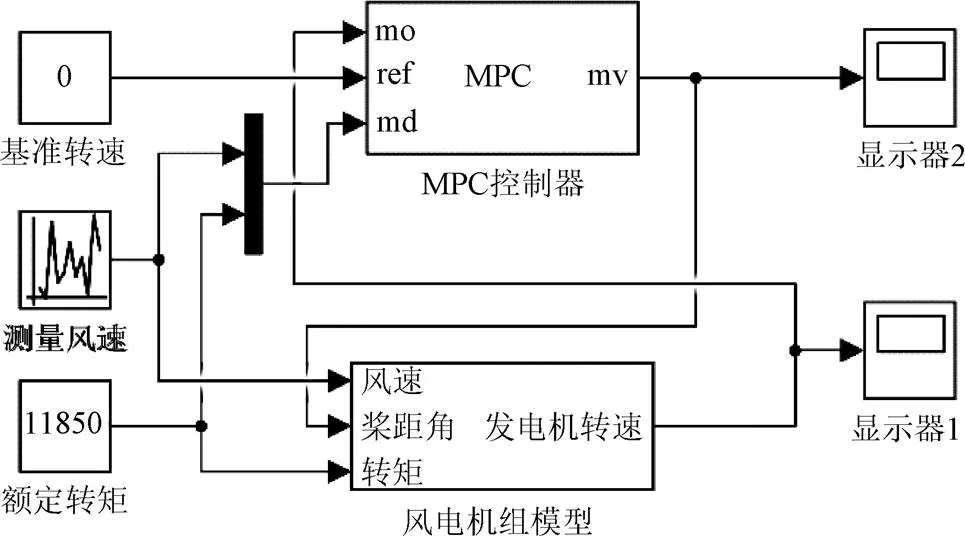
注:mo、ref和md分别为MPC控制器接收到的当前测量输出信号、参考信号和干扰信号;mv为MPC控制器输出的最优控制变量。
3.3 Multi MPC控制器
风电机组随着风速波动,运行工作点一直在变化,因此基于单点的模型预测控制器的控制效果会受到影响。
分析了风电机组在全风速段区间的运行特性,根据风速以测定风速和基于机组状态的估计风速,将机组的运行区间划分为连续且不重叠的5个风速段:损耗优化段、出力快速稳定段、最优叶尖速比段、功率过渡段、功率稳定段,对应设计了5个MPC控制器。为了保证5个MPC控制器能够在各自工作点连续输出控制信号,以轮毂处风速为参考输入,以风速阈值、桨距角和工作点转速为约束条件。提出了1种风电机组多控制目标的运行区间划分方法,如图3所示。
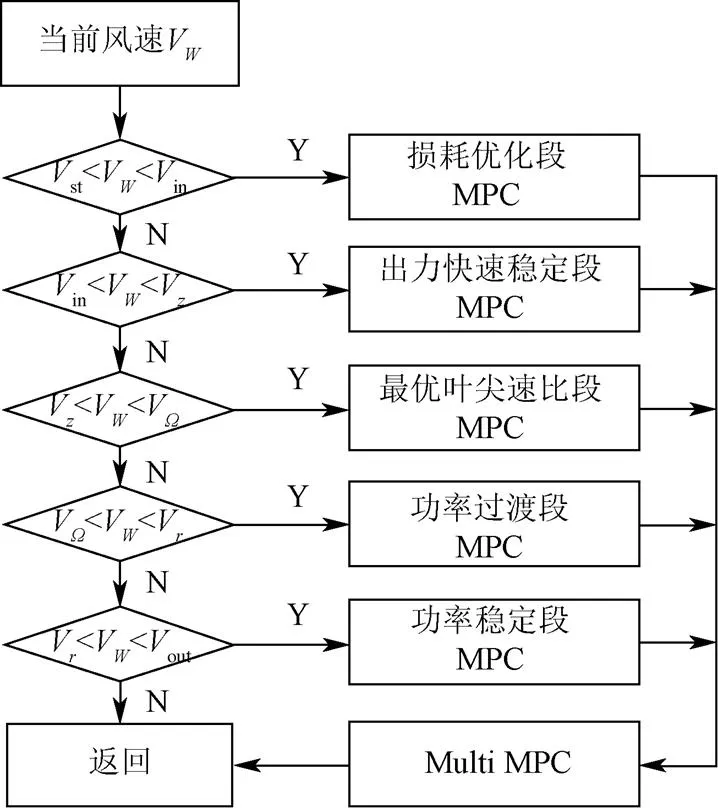
注:VW为轮毂处风速,m·s-1;Vst为启动风速,m·s-1;Vin为切入风速,m·s-1;Vz为最优叶尖速比下限风速,m·s-1;VΩ为最优叶尖速比上限风速,m·s-1;Vr为额定风速,m·s-1;Vout为切出风速,m·s-1。
在风电机组多控制目标的运行区间划分方法的基础上,搭建Multi MPC控制器,结构如图4所示。
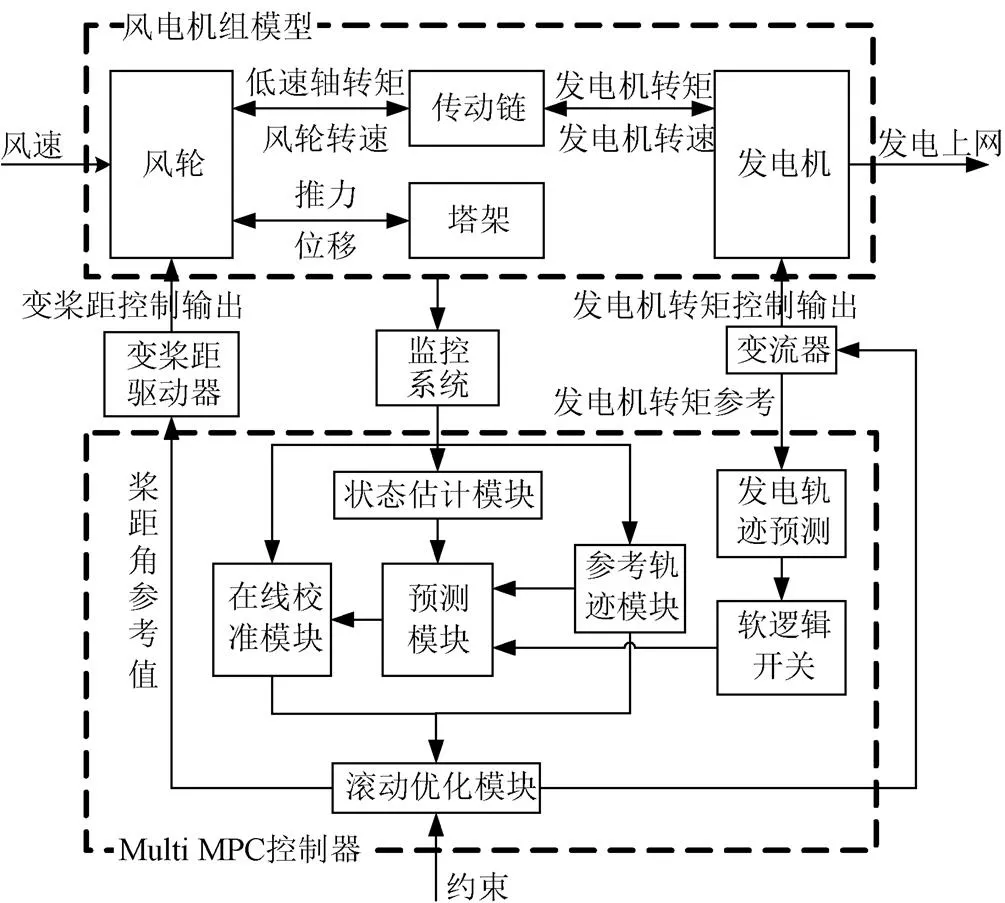
图4 风电机组Multi MPC控制器结构图
4 算例分析
4.1 联合实时仿真平台设计
基于C++语言设计编写了TUV GL Bladed、Simulink和Visual studio的联合实时仿真平台,在联合仿真软件平台中只执行数据的读入和读出操作,具体工作机理如图5所示。

图5 联合实时仿真平台工作原理
TUV GL Bladed与联合实时仿真平台通过动态链接库(Dynamic Link Library,DLL)文件的内存共享实现的通信。DLL文件按照Bladed软件接口的要求设计,以实现对Bladed软件仿真数据的读写;设计内存共享代码后,即可根据控制器的需要将数据存储在指定位置。
Simulink与联合实时仿真平台通过Matlab引擎实现通信。联合实时仿真平台调用DLL文件,得到经过DLL文件编译的数据,同时调用Matlab引擎进行仿真计算,而后写入共享内存。
联合实时仿真平台能够直观地显示仿真的过程,可实时发现控制器存在的缺陷;仿真结果存储在共享内存中,可以在仿真结束后对结果进行分析,联合实时仿真平台可快速进行控制器修改和参数调整。
4.2 MPC算例分析
为了得到风电机组在不同工况下的模拟结果,使用图2所示的MPC控制器进行联合实时仿真分析,随机设定风速范围为18~20 m/s,发电机额定转速为1 500 r/min,预测时域为8,控制时域为1,仿真步长为0.02 s。为对比MPC控制器与PI控制器的控制性能,仅将MPC控制器与PI控制器在设定的阵风和湍流风况下进行仿真结分析,结果如图6所示。
4.2.1 阵风仿真结果
图6b、6c为在图6a所示阵风风速曲线下2种控制器的发电机转速和桨距角仿真结果。对比的结果可以看出,风轮在13.24 s时开始受到阵风的影响,PI控制器在14.84 s开始输出控制信号,明显滞后于风速的突变;而MPC控制器则在12.12 s开始输出控制信号,提前于风速变化进行变桨距控制。MPC控制器作用下发电机组转速区间为1 429.7~1 567.8 r/min,额定转速最大偏离率为4.69%;PI控制器作用下的发电机组转速区间为1 333.16~1 669.73r/min,额定转速最大偏离率为11.32%,MPC控制器可以更好的控制发电机转速的剧烈波动,降低传动链的疲劳载荷。PI控制器控制在17.46~31.62 s时间段内下的桨距角控制幅度较大,而MPC控制器仅在14.36~20.82 s时间段内对变桨距系统进行大幅度控制,之后仅为小幅度微调。
4.2.2 湍流风仿真结果
图6e、6f为在图6d所示湍流风风速下2种控制器的发电机转速和桨距角仿真结果。对比的结果可以看出,湍流风速波动区间为12.53~20.95 m/s。MPC控制器作用下发电机组转速区间为1 442.88~1 552.64 r/min,额定转速最大偏离率为3.81%;PI控制器作用下的发电机组转速区间为1 393.58~1 647.02 r/min,额定转速最大偏离率为9.8%,MPC控制器可以比PI控制器更好的稳定发电机转速,降低传动链疲劳载荷。PI控制器下桨距角变化率最大值为1.145°/s,平均变化率为0.343°/s;MPC控制器下桨距角变化率最大值为0.985°/s,平均变化率为0.273°/s,因此,在湍流风环境中,MPC控制器的控制需要的变桨距载荷小于PI控制器。
因此,在湍流风中,MPC控制器对抑制风电机组变桨距、传动链载荷较PI控制器的性能更好。
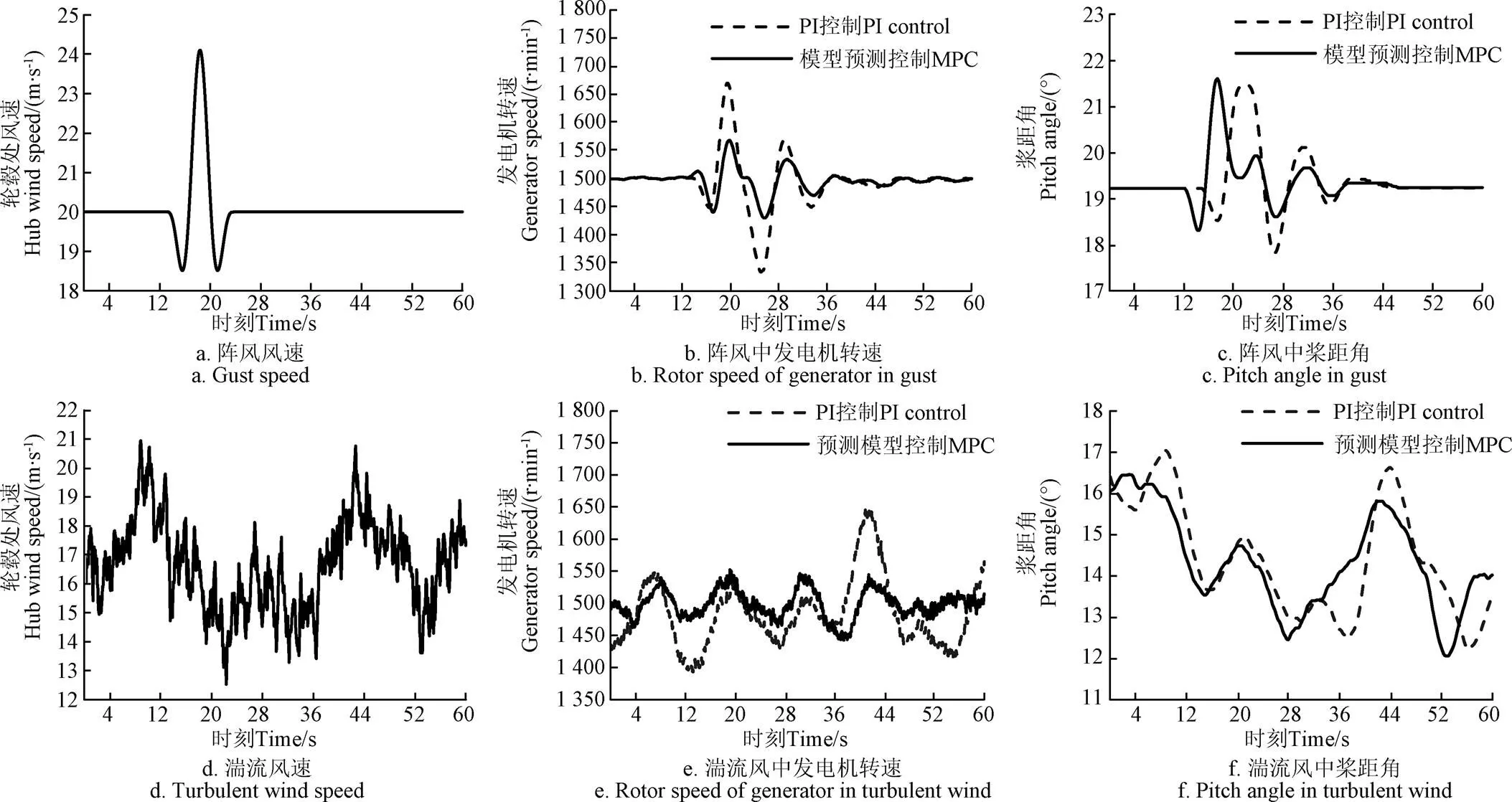
图6 MPC控制器和PI控制器仿真对比
4.3 Multi MPC算例分析
4.3.1 算例系统
为了获得Mutli MPC控制器的非线性控制效果,采用TUV GL Bladed软件中的2.0MW双馈风电机组为被控对象的非线性模型,风电机组基本参数见表1。
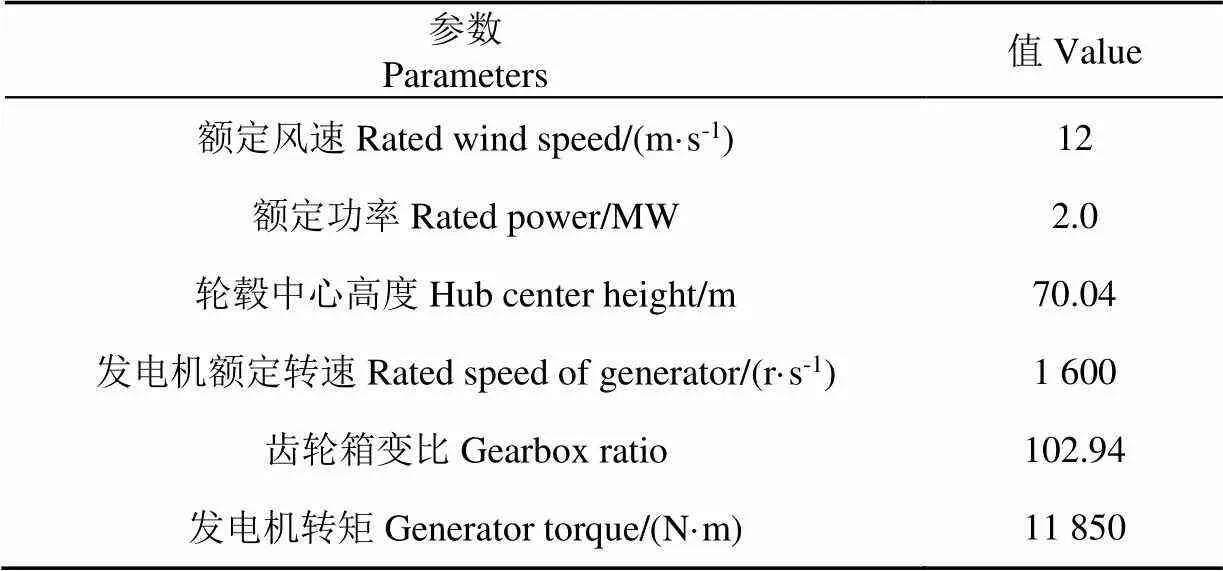
表1 DFIG模型主要参数
4.3.2 结果分析
利用联合实时仿真平台在湍流风环境下进行Multi MPC和PI、MPC控制器的仿真对比分析,仿真结果如图7所示。
湍流风速波动区间为15.65~23.37 m/s。PI控制器作用下的发电机组转速区间为1 454.6~1 599.6 r/min,额定转速最大偏离率为9.09%,最大的转速变化率为4.57 r/s;Mutli MPC和MPC控制器的仿真结果控制效果相近,MPC控制器作用下发电机组转速区间为1 518.7~1 657.3 r/min,额定转速最大偏离率为5.08%,最大的转速变化率为4.37 r/s;Multi MPC控制器作用下发电机组转速区间为1 521.5~1 654.2 r/min,额定转速最大偏离率为4.9%,最大的转速变化率为4.13 r/s。Multi MPC与MPC控制器的控制效果相近,但在Multi MPC控制器的控制下,发电机转速偏离额定转速的程度更低,且转速变化率最低,传动链载荷更低。
Multi MPC、MPC和PI控制器的控制下,桨距角的变化趋势相近,仅在40~52 s时间段内,对应桨距角绝对值运行在14.48°~15.08°、14.4°~15.15°和13.86°~15.34°之间,相比之下,受Multi MPC控制器的控制的桨距角波动幅度最小。Multi MPC和MPC控制器的控制效果相近,且在和PI控制器下桨距角变化率最大值为0.795°/s,平均变化率为0.230°/s;MPC控制器下桨距角变化率最大值为0.74°/s,平均变化率为0.237°/s;Multi MPC控制器下桨距角变化率最大值为0.72°/s,平均变化率为0.209°/s。Multi MPC控制器的控制下的风电机组桨距角变化率最大值、平均变化率均最低,变桨距过程中的载荷也最低。
结果表明,Multi MPC控制器与PI控制器和普通MPC控制器相比,Mutli MPC控制器对发电机转速的超调有明显的抑制作用。Mutli MPC控制器的控制下,变桨距机构的运行幅度最小,桨距角变化率最低。Multi MPC控制器可以明显降低风电机组传动链系统和变桨距机构的疲劳载荷,可以有效降低载荷突变对分布式风电机组运行稳定性的影响。

图7 Mutli MPC与PI、MPC控制器在阵风和湍流风下的仿真对比
5 结 论
在对风电系统MPC控制技术研究的基础上,分别设计风电组机MPC控制器和Multi MPC控制器。基于C++语言设计编写了TUV GL bladed、Matlab和Visual studio的联合实时仿真平台,并在联合实时仿真平台的上,将MPC控制器和Multi MPC控制器与PI控制器进行仿真比较。
湍流风中,Multi MPC控制器作用下,发电机组转速区间为1 521.5~1 654.2 r/min,额定转速最大偏离率为4.9%,最大的转速变化率为4.13 r/s,转速变化更为稳定;桨距角绝对值运行在14.48°~15.08°,波动幅度最小;桨距角变化率最大值为0.72°/s,平均变化率为0.209°/s,桨距角变化率最大值、平均变化率均最低。
[1] Global Wind Energy Council. Global wind report 2019[R]. Brussels, Belgium: Global Wind Energy Council, 2020-03.
[2] 李俊沅. 风电机组对中工具的设计与应用[J]. 风能,2016(10):82-84.
Li Junyuan. Design and application of wind turbine centering tools[J]. Wind Energy, 2016(10): 82-84. (in Chinese with English abstract)
[3] 张妍,王东风,韩璞. 一种风电场短期风速组合预测模型[J]. 太阳能学报,2017,38(6):1510-1516.
Zhang Yan, Wang Dongfeng, Han Pu. Combination forecasting model of short-term wind speed for wind farm[J]. Journal of solar energy, 2017, 38(6): 1510-1516. (in Chinese with English abstract)
[4] Sang L Q, Takao M, Kamada Y, et al. Experimental investigation of the cyclic pitch control on a horizontal axis wind turbine in diagonal inflow wind condition[J]. Energy, 2017, 134(sep.1): 269-278.
[5] 赵春溢,廖礼,李东海,等. 5MW风电机组载荷分析与独立变桨控制优化[J]. 电力科学与工程,2019(9):70-78.
Zhao Chunyi, Liao Li, Li Donghai, et al. Load analysis and independent pitch control optimization of 5 MW wind turbine[J]. Electric Power Science and Engineering, 2019(9): 70-78. (in Chinese with English abstract)
[6] Eduardo J N M, Alex M A, Janardan S R, et al. Active load control of large wind turbines using state-space methods and disturbance accommodating control[J]. Energy, 2018, 150(1): 310-319.
[7] 苑晨阳,李静,陈健云,等. 大型风电机组变桨距ABC-PID控制研究[J]. 太阳能学报,2019,40(10):3002-3008.
Yuan Chenyang, Li Jing, Chen Jianyun, et al. Study on variable pitch abc-pid control of large wind turbine[J]. Journal of Solar Energy, 2019, 40(10): 3002-3008. (in Chinese with English abstract)
[8] 高尚,邓英. 模型预测对减缓风电机组传动链疲劳载荷的作用[J]. 风能,2016(10):72-76.
Gao Shang, Deng Ying. The effect of model prediction on reducing the fatigue load of transmission chain of wind turbine[J]. Wind Energy, 2016(10): 72-76. (in Chinese with English abstract)
[9] 付鹏武,周念成,王强钢,等. 基于时滞模型预测控制算法的网络化AGC研究[J]. 电工技术学报,2014,29(4):188-195.
Fu Pengwu, Zhou Niancheng, Wang Qianggang, et al. Research on networked AGC based on time-delay model predictive control algorithm[J]. Journal of Electrical Technology, 2014, 29(4): 188-195. (in Chinese with English abstract)
[10] 赵国荣,盖後峰,胡正高,等. 非线性模型预测控制的研究进展[J]. 海军航空工程学院学报,2014,29(3):201-208.
Zhao Guorong, Gai Junfeng, Hu Zhenggao, et al. Evolution of nonlinear model predictive control research[J]. Journal of Naval Academy of Aeronautical Engineering, 2014, 29(3): 201-208. (in Chinese with English abstract)
[11] 叶杭冶. 风力发电机组监测与控制[M]. 北京:机械工业出版社,2011.
[12] Liu W, Li C, Liu Y, et al. Predictive control of wind turbine for load reduction during ramping events[J]. International Journal of Electrical Power and Energy Systems, 2017, 93: 135-145.
[13] 曹松青,郝万君,陈歆婧,等. 基于模型预测控制的风电机组载荷控制[J]. 苏州科技大学学报:自然科学版,2019,36(3):79-84.
Cao Songqing, Hao Wanjun, Chen Xinjing, et al. Load control of wind turbine based on model predictive control[J]. Journal of Suzhou University of Science and Technology: Natural Science Edition, 2019, 36(3): 79-84. (in Chinese with English abstract)
[14] 朱江生,马奎超,郭庆鼎. 基于模型预测控制的风电机组独立变桨距控制技术的研究[J]. 电气应用,2014,33(23):112-115.
Zhu Jiangsheng, Ma Kuichao, Guo Qingding. Research on independent variable pitch control technology of wind turbine based on model predictive control[J]. Electrical Application, 2014, 33(23): 112-115. (in Chinese with English abstract)
[15] 陈振宇. 大型风力发电系统多目标优化控制研究[D]. 北京:华北电力大学,2018.
Chen Zhenyu. Study on Multi-Objective Optimal Control of Large-Scale Wind Power Generation System[D]. Beijing: North China Electric Power University, 2018. (in Chinese with English abstract)
[16] 沈坤,张少云,刘录光. 双馈风力发电系统模型预测控制算法研究[J]. 电力电子技术,2019,53(9):86-89.
Shen Kun, Zhang Shaoyun, Liu Luguang. Research on model predictive control algorithm of doubly fed wind power generation system[J]. Power Electronics Technology, 2019, 53(9): 86-89. (in Chinese with English abstract)
[17] 孟洪民,刘吉臻,张江昆,等. 采用半自由工况点和分块优化策略的大惯量风力发电系统模型预测控制[J]. 华北电力大学学报:自然科学版,2017,44(4):78-84.
Meng Hongmin, Liu Jizhen, Zhang Jiangkun, et al. Model predictive control of large inertia wind power generation system using semi free operating point and block optimization strategy[J]. Journal of North China Electric Power University: Natural Science Edition, 2017, 44(4): 78-84. (in Chinese with English abstract)
[18] 张靖,李博文,余珮嘉,等. 基于状态空间的双馈风力发电机模型预测控制[J]. 电网技术,2017(9):177-182.
Zhang Jing, Li Bowen, Yu Peijia, et al. State space based doubly fed wind turbine model predictive control[J]. Grid Technology, 2017(9): 177-182. (in Chinese with English abstract)
[19] 刘兴杰,郭九旺,邬旭东,等. 双馈风力发电机组有功功率多模型预测控制[J]. 太阳能学报,2017,38(4):976-982.
Liu Xingjie, Guo Jiuwang, Wu Xudong, et al. Multiple model predictive control of active power of doubly fed wind turbine[J]. Journal of Solar Energy, 2017, 38(4): 976-982. (in Chinese with English abstract)
[20] 刘兴杰,王伟,郭九旺,等. 永磁直驱风电机组有功功率预测控制方法研究[J]. 太阳能学报,2018,39(1):210-217.
Liu Xingjie, Wang Wei, Guo Jiuwang, et al. Study on active power predictive control method of permanent magnet direct drive wind turbine[J]. Journal of solar energy, 2018, 39(1): 210-217. (in Chinese with English abstract)
[21] Song Y D, Li P, Liu W, et al. An overview of renewable wind energy conversion system modeling and control[J]. Measurement & Control, 2010, 43(7): 203-208.
[22] Leithead W E, Connor B. Control of variable speed wind turbines: Dynamic models[J]. International Journal of Control, 2000, 73(13): 1173-1188.
[23] Thiringer T, Petersson A. Control of a Variable-Speed Pitch-Regulated Wind Turbine[R]. Sweden: Chalmers University of Technology, 2005.
[24] 周峰. 基于动力学耦合的风电机组载荷控制[D]. 北京:华北电力大学,2017.
Zhou Feng. Wind Turbine Load Control Based on Dynamic Coupling[D]. Beijing: North China Electric Power University, 2017. (in Chinese with English abstract)
[25] Burton T, Jenkins N, Sharpe D, et al. Wind energy handbook[M]. West Sussex: A John Wiley and Sons, Ltd., Publication, 2011.
[26] 袁鹏,张磊. 风电机组非线性PI变桨控制器设计[J]. 中国测试,2018,44(3):114-119.
Yuan Peng, Zhang Lei. Design of nonlinear PI pitch controller for wind turbine[J]. China Test, 2018, 44(3): 114-119. (in Chinese with English abstract)
Wind turbine load shedding control based on multi MPC algorithm
Tian De, Chen Zhonglei, Deng Ying
(,,102206,)
The proportion of wind power in the global total power supply is also increasing year by year, and the single unit capacity of wind turbine is also increasing. At the same time, the load of the key components of wind turbine is also more and more large, and the reliability requirements of the structure and control technology are also more and more high, so the impact on the stability of the access system is more and more difficult to be ignored. Therefore, the control strategy and technology of wind turbine control system need not only the power optimization control ability, but also the load reduction control ability. The current research status of wind turbine load reduction is investigated, and the research status of model predictive control (MPC) technology is analyzed. Firstly, the wind turbine system, pitch system and drive chain system of wind turbine are modeled and analyzed, which lays the foundation for the further research of wind turbine control technology. Then, the model predictive control technology is studied deeply. Model predictive control is a kind of control algorithm to deal with nonlinear large time-delay system, which is essentially to solve an open-loop optimal control problem. In order to carry out the simulation comparative study, the variable pitch proportional integral controller of wind turbine is designed; based on the theory of model predictive control technology, the model predictive control controller of wind turbine and the multi model predictive control controller of wind turbine are designed. In the design of the model predictive control pitch controller of wind turbine, the cumulative error between the predicted output of the controlled actuator and the expected target is used as the objective optimization function; in the design of the multi model predictive control pitch controller of wind turbine, five continuous and non overlapping wind speed intervals are set, and five model predictions are designed for five different wind speed intervals At the same time, a division method of multi control objectives operation interval of wind turbine is designed to ensure that the multi model predictive control controller of wind turbine can continuously output control signals. Finally, in order to verify the load reduction ability of multi model predictive control controller for wind turbine, a real-time simulation platform based on MATLAB and TUV GL bladed is designed and written in C++. After verifying the advantages of model predictive control of wind turbine compared with traditional proportional integral controller, the nonlinear model of 2MW doubly fed wind turbine in GL bladed software is taken as the research object, and the multi model predictive control controller, model predictive control controller and traditional proportional integral controller of wind turbine are simulated and analyzed. The results show that, compared with the traditional proportional integral controller and model predictive controller, model predictive controller can effectively reduce the fluctuation amplitude of wind turbine speed, restrain the overshoot of speed, reduce the load of the transmission chain of wind turbine, restrain the fluctuation amplitude and change rate of the pitch angle of wind turbine, and reduce the operation of the pitch mechanism of wind turbine Load. It can reduce the operation cost to a certain extent and improve the overall life of wind turbine.
models; control algorithm; wind turbine; load shedding controller
田德,陈忠雷,邓英. 基于复合MPC算法的风电机组降载控制[J]. 农业工程学报,2020,36(21):65-70. doi:10.11975/j.issn.1002-6819.2020.21.008 http://www.tcsae.org
Tian De, Chen Zhonglei, Deng Ying. Wind turbine load shedding control based on multi MPC algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(21): 65-70. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.21.008 http://www.tcsae.org
2020-04-24
2018-06-04
国家863计划项目智能电网关键技术研发,风电场、光伏电站集群控制系统研究与开发子课题(2011AA05A104)
田德,博士,教授,主要从事风力发电系统理论与技术研究。Email:tdncepu@163.com
10.11975/j.issn.1002-6819.2020.21.008
O325/TK79
A
1002-6819(2020)-21-0065-06
猜你喜欢
科学技术创新(2022年32期)2022-11-03
农业灾害研究(2022年6期)2022-08-29
铁道建筑(2021年10期)2021-11-08
能源工程(2021年1期)2021-04-13
初中生世界·九年级(2020年9期)2020-09-21
上海电气技术(2020年1期)2020-04-08
现代农业科技(2018年11期)2018-08-14
山东工业技术(2018年1期)2018-01-02
中学生数理化·八年级数学人教版(2016年4期)2016-08-23
风能(2016年11期)2016-03-04