基于最小外接矩形的遥感影像建筑物轮廓优化方法
2021-02-05 08:40周再文刘星雨马紫雯高贤君
北京测绘 2021年1期
周再文 王 建 朱 恰 刘星雨 马紫雯 高贤君
(长江大学 地球科学学院, 湖北 武汉 430100)
0 引言
建筑物作为地理信息研究的比较重要的地理要素之一,是现代城市的主要组成,也是用来衡量城市发展的比较重要的指标。建筑物信息的提取对城市规划、地理信息系统的实际应用、数字城市应用等方面具有重要的意义和作用[1]。随着遥感技术的快速发展,各种遥感影像的空间分辨率也越来越高。由于高分辨率遥感影像具有地物纹理信息丰富、成像光谱波段多、重访时间短等特点,其已经成为地物信息获取的重要的数据来源[2]。但是高分遥感影像在提高地物光谱特征,突出地物结构、纹理信息的同时,会带来严重的异物同谱的问题。实际工作中建筑物周围的各种其他无关地物的干扰也会导致建筑物信息最终的提取结果与原始影像中的建筑物的形状和边界轮廓不一致。因此基于已有的建筑物信息提取方法对建筑物的边界轮廓进一步优化对于提高建筑物精度具有十分重要的研究意义。
目前比较主流的建筑物信息提取方法,按照遥感影像提取建筑物的原理主要分成三类:
(1)基于区域分割的提取方法:先利用监督、非监督或面向对象的分类方法对影像进行初步的分类;再对建筑物所在的类别根据建筑物自身的几何形状、空间信息等特征提取具体的建筑物目标[3]。黄慧萍等[4]提出了以多尺度影像分割与面向对象影像分析为主要技术,利用样本多边形对象的成员函数建立训练区,自动提取大庆市城市绿地覆盖信息,达到清查城市绿地的目的。
(2)结合辅助知识的提取方法:利用遥感图像中建筑物的阴影、纹理、空间位置、几何结构等特征来提取建筑物,提高建筑物信息提取精度。高贤君等[5]设计了基于偏移阴影分析的建筑物样本自动提取方法,结合支持向量机(SVM)分类模型对影像进行初提取并进行地物分类,在进行相应的后处理操作之后,利用相交边界阴影比率筛选出无阴影的非建筑物等措施获取最终结果。
(3)基于边缘和角点监测与匹配的提取方法:使用边缘监测的算法得到建筑物的边缘,再根据建筑物的空间关系对影像中提取的边缘线段进行分组,搜索其平行线,通过经验知识组成符合建筑物空间结构和轮廓的矩形,实现对建筑物的提取。Taejung Kim[6]等提出了根据现实中建筑物的屋顶边缘多呈相互平行的线段特点,利用投票策略选取直线最多的方向为房屋边缘走向,达到提取建筑物信息的目的。陶超等[7]在Harris算子提出角点的基础上,加上约束准则检测居民地的角点,根据影像中角点的分布情况,构建函数度量影像中每一个像素属于建筑物的概率,最后利用二值分割的方法提取影像中建筑物的信息。
以上三种方法在进行建筑物信息提取的过程中或多或少都会受到地物周围的阴影、植被等噪声干扰,导致提取结果出现边界锯齿化、不规则等问题。本文在利用深度学习提取的高分辨遥感影像的建筑物信息基础上,提出一种解决建筑物图像边界问题的思路。
1 数据来源
基于深度学习提取建筑物信息的方法是以谷歌地球上开源的高分遥感影像数据集作为基础的实验数据,因谷歌地球上的开源的高分遥感影像国外地区的建筑物结构比较简单,同时遥感影像数据比较清晰,故实验数据集多选取国外的高分遥感影像进行实验。基于tensorflow深度学习的方法构建建筑物识别的模型,通过增加训练样本的数据量,不断地修正训练模型,提高测试样本的提取精度。最后将提取精度最高的样本进行建筑物后处理验证,得到建筑物信息的初始提取结果。上述基于深度学习的建筑物信息提取的方法参考了朱光亚等[8]基于深度学习的遥感影像建筑物信息提取研究的论文和高扬等[9]基于卷积神经网络的高分辨率遥感影像建筑物信息提取的论文的部分思想。
UNet网络作为比较早的卷积神经网络之一,主要用于图像的处理,由用于捕捉语义特征的编码端,精准定位的解码端以及结合底层信息和高层信息的跳跃连接这三部分组成。本实验中,输入影像的影像块大小为512×512,从而构建特征金字塔(实验的数据集是新西兰克赖斯特彻奇地区的高分辨率遥感影像)。本次实验的环境为:i7-9700k处理器,32 GB内存,NVIDIA RTX2080Ti 8G显卡,GPU加速库采用CUDA10.0。DeepingLearn框架以Keras作为前端,TensorFlow为后端。图1、图2的(a)和(b)是部分原始遥感影像和利用UNet神经网络提取的灰度图二值化的结果。
由图1和图2的(b)和(c)的对比,可以很明显地看出,经过后处理验证的优化提取处理,错分建筑物的问题得到了部分解决,提高了建筑物特征信息的提取精度。但是如图1(c)和图2(c)所示,部分建筑物的边界轮廓还是存在不规整问题,另有部分建筑物内部存在细小孔洞等问题,为此,需要继续对其进行建筑物边界轮廓的优化。

图1 遥感影像YX1提取优化对比

图2 遥感影像YX2提取优化对比
2 建筑物轮廓优化原理
对在基于深度学习提取建筑物特征和改进的马尔科夫随机场处理错分建筑物的问题的基础上所得到的提取结果仍然存在建筑物边界不规整、边界锯齿化严重的问题,本文提出的解决思路是:首先是利用目前最常用的线要素压缩算法——垂距法[10]对提取到的建筑物轮廓删除边界轮廓的冗余点并对建筑物轮廓进行多边形拟合处理。然后通过对多边形拟合之后的轮廓利用最小外接矩形的拟合算法[11],得到最小外接矩形的四个顶点坐标,最后再对拟合之后的最小外接矩形的长宽比、轮廓面积、拟合出来的多边形点数做筛选,选择最合适的外接矩形轮廓作为最后边界优化的最终结果,使通过优化后的边界轮廓尽量与遥感影像原图上的建筑物保持一致,提高研究后期进行建筑物变化检测的最终精度。
2.1 基于垂距法的多边形拟合
经过前期深度学习提取的建筑物边界一般是由许多连续的像素点组成,会出现大量相邻的点位于同一条直线上产生数据冗余,也是导致提取的建筑物边界轮廓出现锯齿化的一个原因。本文利用地理信息原理中常见的矢量数据压缩的方法——垂距法来解决这个问题,即将提取出来的建筑物轮廓进行冗余点去除,将建筑物的边界轮廓拟合成相对规则的多边形,如图3所示。
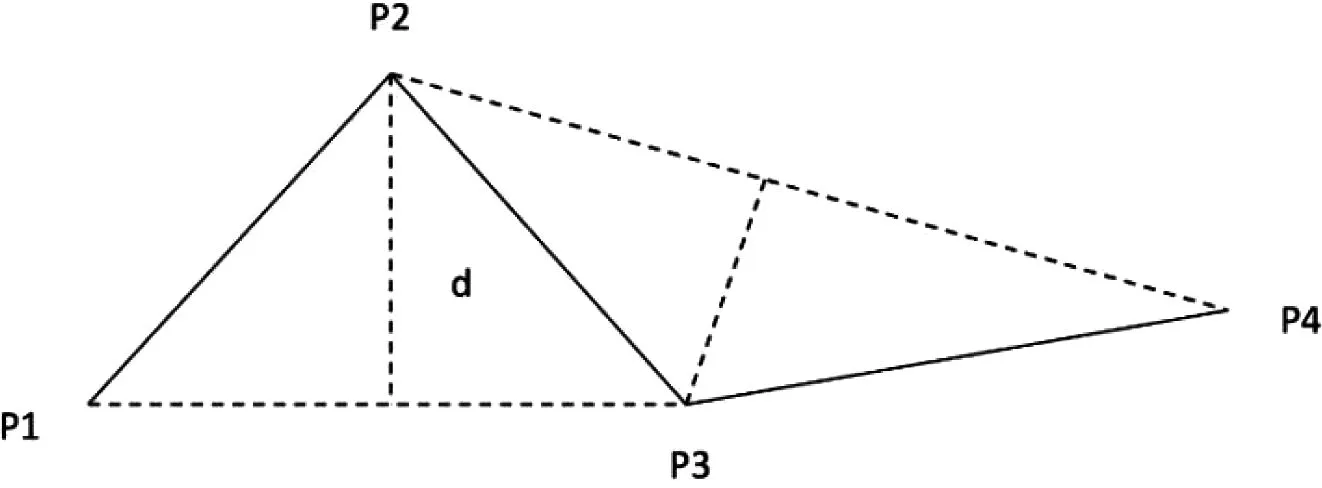
图3 垂距法处理过程示意图
垂距法的算法思想[10]是:每一次按照一定顺序取曲线上连续的三个点,计算中间的点到其余两点连线的垂直距离d,并将d与给定的限差(阈值)D比较。求得的垂直距离d小于给定的阈值D时,则去掉中间点;反之,则中间点保留。然后按照顺序依次取下三个点继续处理,直到遍历整条曲线。多边形拟合原理的示意图如图4所示,具体过程如下:

图4 垂距法处理结果对比图[10]
(1)取任意建筑物轮廓边界上的一段边界P1~P4,分别连接P1P3和P3P4;
(2)按顺序取P1P2P3前三个点,计算中间点P2到线段P1P3的距离d;
(3)比较中间点到其余两点的距离d与给定的阈值D的大小,若d≤D,则去掉P2点,P1~P3线段处理结束。
不过,尽管短周期存在周期及基数压力,空调依然是最为稳固的家电细分板块,格力美的的双寡头地位稳固,维持市场大体稳定,也让行业均价处于缓慢提升通道。不过从竞争格局来看,二线品牌还能保持一定市场空间,但其它杂牌生存空间则日益狭小。
(4)若d≥D,保留中间点P2,然后沿着直线继续依次对剩下的曲线进行处理,直到整条线处理结束。
(5)将经过上面四个步骤保留下来的点依次连接起来,得到的曲线就是通过垂距法对建筑物轮廓拟合的结果。
2.2 基于建筑物最小外接矩形的拟合
现实生活中建筑物是比较有规律的人造工程产物,建筑风格和外形千差万别,但是,就建筑物的轮廓而言,大多数建筑物的边界轮廓为矩形或者矩形的组合[11-12]。我们在通过处理基于垂距法对建筑物轮廓进行多边形拟合后,可以继续基于建筑物的最小外接矩形来实现对建筑物边界轮廓的进一步拟合逼近。
具体处理过程如下:
(1)首先利用轮廓监测函数将多边形拟合的边界轮廓监测出来并进行保存。
(2)利用第一步得到的边界轮廓点集,采用Sklansky算法,得到边界轮廓点集的凸包。
(3)利用第二步得到的建筑物边界的凸包,根据旋转卡尺算法(Rotating Calipers),生成最小面积外接矩形。
(4)通过对满足长宽比、轮廓面积、拟合出的多边形定点数三个条件的最小外接矩形进行筛选,对满足条件的轮廓画出轮廓拟合的最小外接矩形,输出处理后二值化影像。
3 实验结果分析
3.1 实验结果
通过本文提供的建筑物轮廓优化的方法,对遥感影像YX1和YX2进行进一步优化,结果如图5和图6所示。
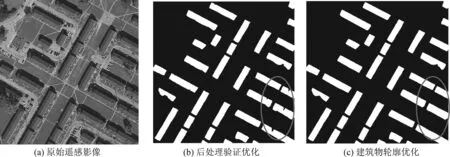
图5 遥感影像YX1逐级优化结果对比图

图6 遥感影像YX2逐级优化结果对比图
通过图7和图8的局部优化放大图可以很明显看出,本文所介绍的建筑物轮廓优化方法对于部分建筑物边界轮廓有一定的优化效果,能够较大限度地逼近实际建筑物边界轮廓。但是对于较复杂的建筑物(如边界轮廓为回字形建筑和阶梯形建筑)边界轮廓处理上还存在问题。本文所介绍的方法只能处理由比较简单矩形组合的建筑物轮廓,有一定的应用局限性。

图7 遥感影像YX1局部优化放大图
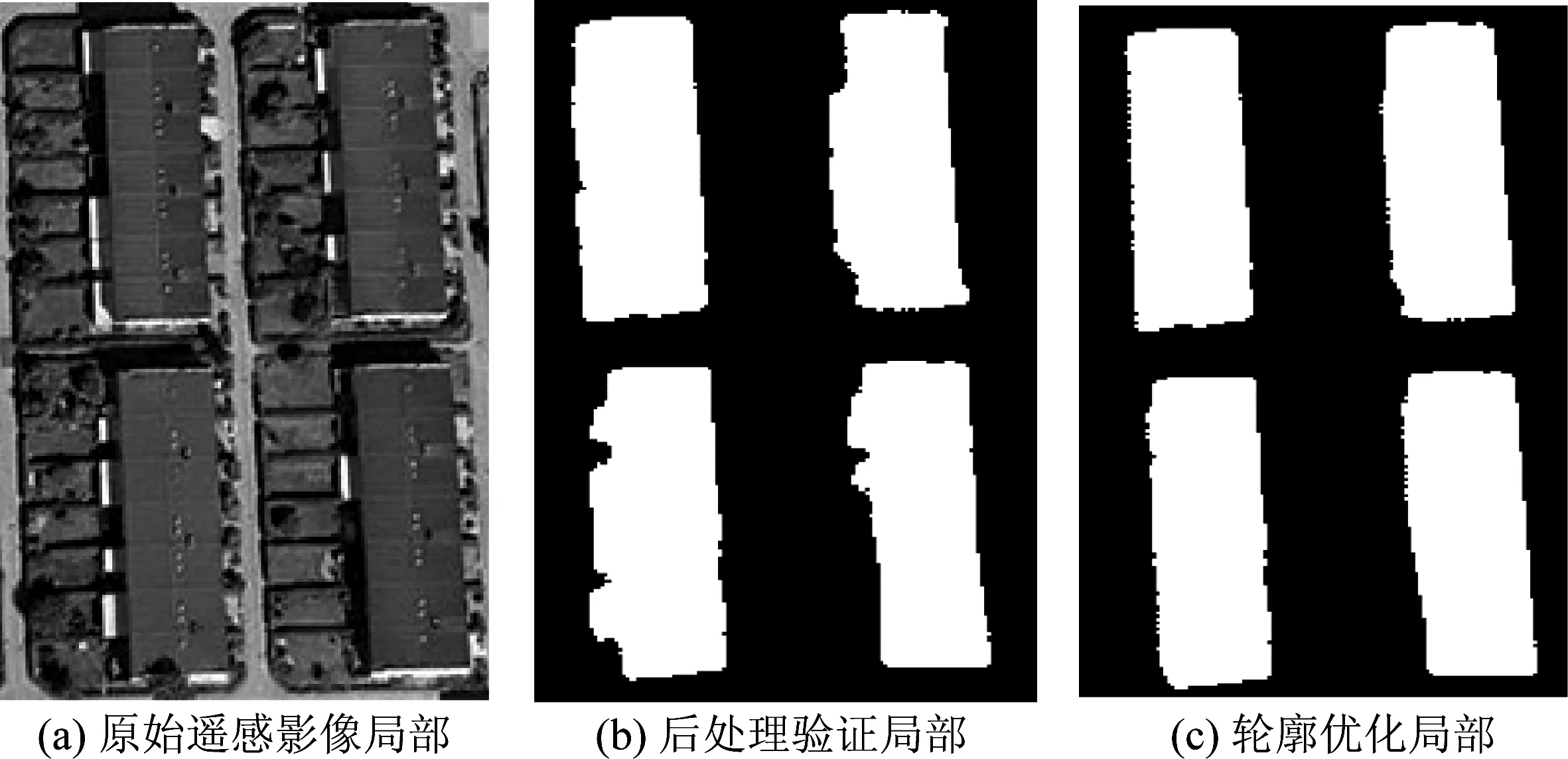
图8 遥感影像YX2局部优化放大图
3.2 实验精度评价
传统的影像分类方法经常采用总体精度(overall accuracy, OA)、平均精度(Average Accuracy,AA)和Kappa系数作为评价指标[13]。本文选用其中的OA指标和混淆矩阵中的用户精度的概念对本试验的结果进行精度评定。精度评定结果如表1所示。
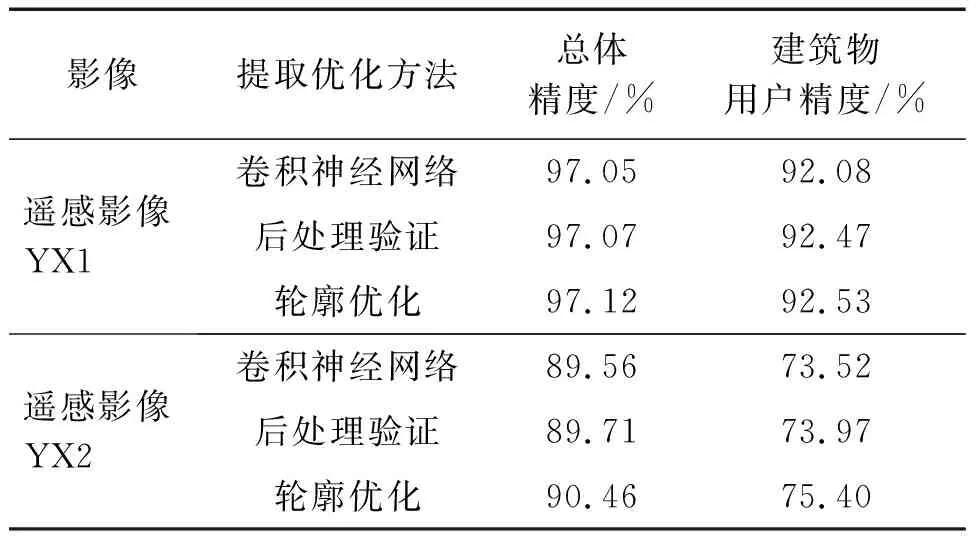
表1 实验结果精度评价表
表1显示,通过深度学习提取的建筑物特征信息经过建筑物信息后处理验证,消除部分错分建筑物问题和轮廓优化,使最终建筑物特征信息提取的精度有了明显提升,实现了建筑物信息的精提取。但是当建筑物颜色和地面颜色很相近(如遥感影像YX2的情况),部分建筑物的信息经过卷积神经网络提取和后处理之后,仍然存在相应的误差,导致建筑物用户精度稍低。
4 结束语
本文在深度学习提取建筑物信息基础上,提出一种优化建筑物图像边界轮廓问题的思路。对于深度学习提取建筑物图像结果中出现的锯齿化、建筑物边界不规整等问题,提出了一种利用垂距法进行建筑物边界轮廓的多边形拟合,再继续利用初提取的结果进行建筑物轮廓的最小外接矩形选取,最后得到较符合实际的建筑物边界轮廓。通过实验验证,本文所介绍的方法在对深度学习提取高分遥感影像的建筑物结果的后处理过程中,对建筑物的边界轮廓进行的拟合逼近,使得提取后的结果与实际影像中的建筑物的轮廓比较接近,为建筑物变化监测提供可靠的基础数据。这种方法为通过高分遥感影像提取建筑物信息的后处理的边界优化提供了一种可行的新思路。
猜你喜欢
中学生数理化·八年级数学人教版(2020年4期)2020-10-29
少年漫画(艺术创想)(2020年2期)2020-06-15
时代英语·高一(2019年5期)2019-09-03
中学生数理化·八年级数学人教版(2017年4期)2017-07-08
中学生数理化·八年级数学人教版(2017年2期)2017-03-25
福建中学数学(2016年4期)2016-10-19
大灰狼(2009年7期)2009-08-26
舒适广告(2008年9期)2008-09-22
中学生数理化·七年级数学华师大版(2008年4期)2008-06-14
中学生数理化·七年级数学人教版(2008年3期)2008-06-10