基于TOF摄像头的车位检测方案
2021-02-06 15:00王金华陈泽武张力锴
汽车实用技术 2021年2期
王金华,陈泽武,张力锴
基于TOF摄像头的车位检测方案
王金华,陈泽武,张力锴
(广州汽车集团股份有限公司汽车工程研究院,广东 广州 510640)
为了解决目前市场上普遍基于超声波传感器对停车位检测都存在盲区范围大、检测精度低等问题,提出了基于TOF摄像头的停车位检测方案。对多种极限停车位场景进行分析,以广汽新能源GE3车辆为载体,并以安装丘钛科技TOF摄像头为研究对象,对该检测方案在多种场景下进行实车验证。测试结果表明:使用TOF摄像头的停车位检测方案不仅能在更小盲区范围内保证停车安全,而且在满足高精度的情况下适应更多极限车位场景。
TOF摄像头;自动泊车;车位检测;极限车位
引言
智能泊车的一项关键技术就是对疑似停车位进行检测,车位检测精度以及障碍物检测盲区对泊入停车位的效果产生直接影响。车位检测精度是由感知器的信息识别算法以及感知器的性能共同决定,用于解决车辆对外部环境信息的感知问题。当前采用的车位检测感知器主要分为三类:基于环视摄像头的车位检测;基于超声波传感器的车位检测;基于激光测量扫描仪的车位检测。
基于超声波传感器的停车位检测,其原理是利用超声波回波信号感知障碍物的距离信息,再根据空间停车位的要求进行判断是否为有效停车位。苏松恺[1]基于超声波传感器的车位边缘误差分析及补偿。匡兵等[2]基于超声波雷达的车位检测算法。这些基于超声波检测停车位的方案不仅受环境影响较大尤其是温度,而且检测盲区范围也较大。
基于环视摄像头的停车位检测,其原理是通过图像处理技术识别图像中边缘数据特征,再根据线车位的要求进行判断是否为有效停车位。郭剑鹰等[3]基于多视觉传感器对车位进行识别。王晋疆等[4]一种基于环视系统的车位检测方法。光照强度直接影响视觉识别率以及识别精度,导致泊车效果不稳定。
基于激光测量扫描仪的车位检测,其原理是通过收发激光束感知障碍物的距离信息,再根据空间停车位的要求进行判断是否为有效停车位。王海[5]基于激光雷达的自动泊车环境感知技术研究。此类的激光扫描仪不仅价格成本高昂,安装不方便,影响整车的造型设计,而且接收激光束装置的稳定性影响识别精度。
基于飞行时间TOF(Time-Of-Flight)摄像头的车位检测,发射多次脉冲光,接收障碍物的反射,得到统计直方图,直接计算光的飞行时间。该方案能够获得障碍物的三维数据,从而识别停车位是否有效。不仅成本远低于激光测量扫描仪,而且算法简单,盲区距离短,适应场景更多,尤其能够解决极限停车位的泊车需求。
因此,本文基于飞行时间摄像头对停车位进行识别,并对极限停车位场景进行分析和验证。
1 TOF摄像头泊车辅助系统
泊车辅助系统主要由三部分组成:TOF摄像头识别车位及车位内障碍物信息;泊车轨迹规划;车辆执行器控制。
1.1 TOF摄像头基本特性
TOF摄像头具有的基本特性如下表1所示,在性能上优于超声波及环视摄像头,在成本上略高于超声波传感器,但远低于激光测量扫描仪。
表1 TOF摄像头的关键性能参数
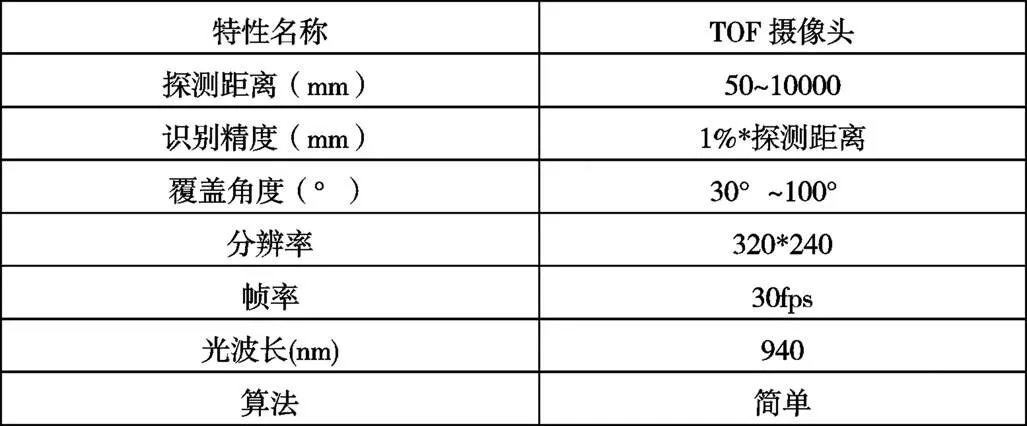
TOF摄像头可以接收障碍物的数据信息包括二维的灰度数据以及深度数据。
1.2 TOF摄像头探测障碍物原理
TOF摄像头的基本原理是根据光束的往返时间差来获得距离信息[6]。本文采用主动发光源LED作为光束发射装置,对脉冲波进行调制法[7],如图1所示。

图2 TOF摄像头的测距示意图
即TOF摄像头通过发射多次脉冲光,经障碍物反射后采集得到统计直方图,直接计算光的飞行时间。如下公式所示:

其中d表示TOF摄像头与障碍物反射点的检测距离值,n表示发射与返回的光波的周期数,c表示光在空气中的传播速度,f表示光频率,△表示发射光与接收光的相位差。当发射光与接收光的出现相位差时,可以直接计算出障碍物的距离。
1.3 停车位识别算法
基于TOF摄像头的泊车辅助系统由2个TOF摄像头组成。安装位置分别在车辆前端两侧,如图3所示。

图3 TOF摄像头安装位置俯视图
当用户开启自动泊车功能时,自动泊车系统对车辆两侧的障碍-物进行实时检测,为用户提供多车位选择。
1.3.1 TOF摄像头识别空间车位
TOF摄像头的深度信息是基于公式(2)所示的探测距离,摄像头涉及的像素坐标系与世界坐标系通过转换[8]得到一一对应的坐标值。

图4 空间车位识别过程
本文采用阵面扫描方式采集图像数据,即每单帧接收76800个反射点的数据,刷新频率为25帧每秒。当车速低于7.2km/h时,能够对直径为75mm的PVC标准杆进行识别。空间停车位的识别过程如图4所示。
说明:中值算法是对阵面中每个像素进行由小至大的升序比较,找出最小数值,以此像素点为原点与相邻像素坐标的距离值做比较,并以40ms为刷新频率进行更新,作为边缘切割提取切面特征。
空间停车位识别关键特征数据及检测过程如图5所述。

图5 空间车位检测过程
VS为自车行驶方向,PD为自车与障碍物之间的距离,A点为1号障碍物关键特征检测数据跳变点,B点为2号障碍物关键特征检测数据跳变,SL为自车行驶过程的位移补偿数据,SD为障碍物A点及B点纵向检测空间数据。当SL的数据大于等于自车车长+0.8米,且最小数值(图4)大于自车宽度+PD时,自动泊车系统判定为有效空间停车位。
1.3.2 TOF摄像头识别线车位
自动泊车系统采集TOF摄像头中的根据障碍物的反射率可以提炼出灰度信息,经边缘特征[8]提取可以直接用于线车位识别。线车位通常包括T、口、凵、+等特征。识别效果如下图6所示。

图6 线车位识别效果图
自动泊车系统可以基于空间车位识别、线车位识别及车位内障碍距离综合判断疑似车位的有效性,并优先以线车位的世界坐标点作为目标车位的参考点。
2 场景分析
2.1 垂直停车位障碍物检测
TOF摄像头的检测距离可以达到8米,最远测试距离误差小于等于8厘米。因此能够对垂直/斜向停车位空间范围内的障碍物进行检测。而当前市场上成熟的超声波传感器最远探测实际有效距离小于5米,因此无法有效覆盖垂直车位纵向空间内的障碍物检测。效果如下图7(a)(b)所示。
PD的间距通常为0.5米至1.5米,车辆行驶车速通常低于25千米每小时。基于超声波的检测方案检测垂直车位纵向距离3米左右,剩余的盲区无法覆盖,降低停车位的有效性。而基于TOF摄像头的方案能够检测垂直车位纵向距离6米左右,能够有效识别空间范围内的障碍物,进而提升停车位识别率。

图7 垂直车位纵深探测距离
2.2 停车位边缘检测
对于空间车位的识别,关键参数在于边缘的检测,目前基于超声波的检测方案都是需要车辆前后两颗长距离超声波传感器进行数据耦合才能提高识别精度,因此车辆需要行驶超过障碍物的边缘。基于TOF摄像头的方案只需要在车头侧方安装一颗摄像头即可,如图8所示。

图8 障碍物边缘识别
障碍物的边缘识别精度直接影响到泊车终点位置的偏差效果。基于超声波的方案识别边缘偏差大于等于10厘米,即P1_(X,Y)及P2_(X,Y)世界坐标点的误差大于等于±5厘米。基于TOF摄像头的方案识别边缘偏差小于等于1厘米,即P3_(X,Y)及P4_(X,Y)世界坐标点的误差小于等于±1厘米。对于极限的空间,边缘识别精度的要求则非常高,如图9极限垂直场景所示。

图9 极限空间车位场景
3 实验验证
本文在实验车上安装了1颗TOF摄像头,并通过电脑终端驱动及控制TOF摄像头,采集障碍物的数据,再进行停车位及障碍物的识别算法处理。本文研究的主要泊车场景为垂直停车位以及垂直车位内纵深障碍物的场景。
3.1 实验设计及结果
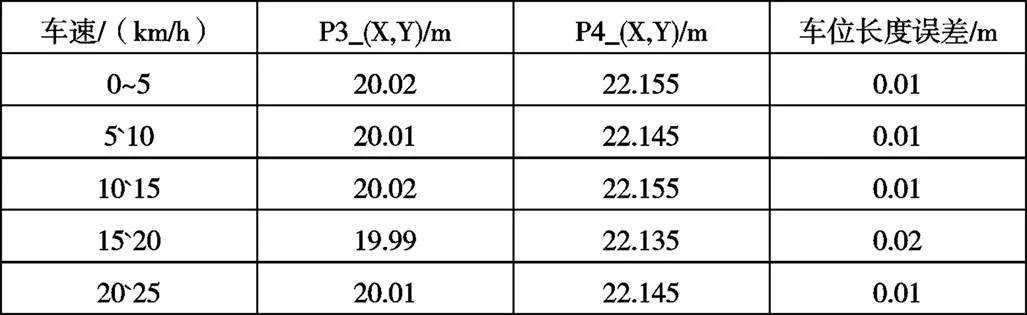
用两辆轿车构成垂直停车位,两辆轿车前轮毂中心间距设计为实验车宽+20厘米,为进一步验证TOF摄像头在不同车速下的识别精度,实验车与障碍车间距(PD)为1米。为验证边缘的识别精度,预先设定车辆每次从相同原点行驶不同的速度,进而读取障碍车辆的边界值,即P3_(X,Y)及P4_(X,Y)。如表2 所示。
表2 极限车位(车宽+20cm)边缘检测精度验证

从表2 可知,在不同车速行驶工况下,基于TOF摄像头检测停车位的边缘点P3_(X,Y)及P4_(X,Y)最大误差为2厘米,车辆宽度(SL)最大误差为2厘米,边缘检测精度能够适应极限车位的泊车轨迹规划。
两辆轿车前轮毂中心间距设计为实验车宽+30厘米,为进一步验证TOF摄像头在不同车速下的识别精度,实验车与障碍车间距(PD)为1米。如表3 所示。
表3 极限车位(车宽+30cm)边缘检测精度验证
从表2、表3可得出基于TOF摄像头的车位检测算法在垂直车位工况下,以不同车速检测车位时, P3_(X,Y)、P4_(X,Y)点的最大误差为2厘米,车位宽度(SL)的最大误差为2厘米,能够满足极限车位的检测精度要求。
障碍物采用标准锥形雪糕筒,分别放置在垂直停车位距离(OD)车头方向的4米、5米及6米位置(③),也采用不同车速进行验证有效性。车辆与障碍车间距1米,测量数据以雪糕筒顶部中心为测量点,检测数据如表4所示。
从表3可得出基于TOF摄像头的障碍物检测算法在垂直车位纵深位置,以不同车速检测时,放置4米距离的最大误差为6cm,放置5米距离的最大误差为7cm,放置6米距离的最大误差为8cm。在最远端的6米范围内识别障碍物的精度能够满足车位有效性的判断依据。
表4 车位内障碍物不同位置的检测精度验证

基于以上场景,TOF摄像头检测车位精度都优于超声波传感器的检测精度,且性能稳定。证明了该方案能够满足更高精度的泊车场景工况,由于篇幅有限,不再列举其他泊车场景的测试验证结果。
4 结束语
本文提出了一种基于TOF摄像头的车位检测方案,并在多种车速工况下对障碍物边缘精度的验证以及对垂直车位空间内障碍物的检测精度验证。测试结果表明,基于TOF摄像头的车位检测方案不仅能够解决超声波及环视视角对垂直车位纵深障碍物识别覆盖率低的问题,同时提升了对障碍物边缘识别精度,更好地适应了极限车位的工况。
[1] 苏松恺.基于超声波传感器的车位边缘误差分析及补偿[J].上海:上海汽车,2019(08):37-42.
[2] 匡兵,史云鹏,罗作煌,等.基于超声波雷达的车位检测算法[J].桂林:桂林电子科技大学学报,2019.39(3):190-195.
[3] 郭剑鹰,周小兵,管西强.基于多视觉传感器的泊车辅助系统设计[J].传动技术,2018(4):7-12.
[4] 王晋疆,王鹏飞.一种基于环视系统的车位检测方法[J].天津:分析仪器,2019(1):71-77.
[5] 王海.基于激光雷达的自动泊车环境感知技术研究[D].大连:大连理工大学,2013.
[6] 胡康哲.TOF深度成像系统的研究与实现[D].武汉:武汉理工大学.信息工程学院.2018.
[7] 王朋.飞行时间法成像系统与应用研究[D].湘潭大学.物理与光电工程学院.2019.
[8] 范哲.基于Kinect的三维重建[D].西安电子科技大学,2012.
Parking space detection proposal based on TOF Camera
Wang Jinhua, Chen Zewu, Zhang Likai
( Guangzhou Automobile Group Co., Ltd., Automobile Engineering Institute, Guangdong Guangzhou 510640 )
In order to solve the problem that the parking detection precision of the automatic parking system based on ultrasonic sensor is not high, the blind area is wide. A proposal based on TOF(Time Of Flight) for parking space detection is proposed. The proposal is validated that is analyzed in a variety of extreme parking space scenarios, and the GAC new energy GE3 is used as the carrier, and the Q-Tech TOF camera is taken as the research object. The proposal is validated by an experimental vehicle in a variety of extreme parking space scenarios and speed conditions. The test results show that the parking space detection proposal using the TOF camera can not only ensure parking safety in a smaller blind area, but also adapt to more extreme parking scenarios with high precision.
Time of flight camera; Automatic parking assist; Parking space detection; Extreme parking scenarios
10.16638/j.cnki.1671-7988.2021.02.006
U471.15
A
1671-7988(2021)02-16-04
U471.15
A
1671-7988(2021)02-16-04
王金华(1985-),男,本科,就职于广州汽车集团股份有限公司汽车工程研究院,研究方向为自动泊车系统设计、智能驾驶技术。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
小猕猴智力画刊(2019年8期)2019-09-12
环球时报(2019-07-24)2019-07-24
好孩子画报(2019年10期)2019-01-10
故事会(2018年13期)2018-07-03
读书文摘·经典(2017年8期)2017-08-09
科技资讯(2012年28期)2012-07-09