基于装配语义的航天产品虚拟装配过程仿真方法
2021-02-07 11:55刘少丽武林林刘检华杜增辉马江涛
北京理工大学学报 2021年1期
刘少丽, 武林林, 刘检华, 杜增辉, 马江涛
(北京理工大学 机械与车辆学院,北京 100081)
虚拟装配技术可以在无物理样件的情况下,对装配工艺过程进行动态仿真、规划与优化,从而有效提高产品装配效率和装配质量[1]. 传统的约束驱动虚拟装配仿真以人机交互的方式设置大量的几何约束与位置约束,技术成熟,对软件要求低,但对设计人员要求高,工作效率低. 有研究者如李庆利等[2]将零部件间的几何约束应用到同类型零部件装配过程,提高工作效率. 针对提高虚拟装配过程仿真工作效率的问题,部分学者采用简化约束的方式减少人工操作,Singh等[3]将参与装配配合约束的一组几何元素定义为装配端口;程亚龙等[4]定义并识别紧固件的装配特征,实现紧固件的快速自动装配;Guo等[5]采用了闭环图和属性邻接图进行装配特征的识别,实现模具的自动装配. 这些研究将零件间大量的几何约束简化为成组的装配特征或端口,提高虚拟装配过程仿真的自动化程度,但是仍然需要人工获取装配工艺信息并选取特征,定义装配关系. 为了进一步提高虚拟装配过程仿真工作效率,需要实现几何特征和约束的自动推理选取,在此背景下出现了基于语义的装配工艺仿真驱动方法.
用户通过使用工程术语来表达和认识装配零部件间的装配关系,因此有学者引入语言学的部分方法,提出了装配语义的概念,抽象描述装配零部件间存在的定位约束、装配规则与装配操作. 目前语义用于装配的研究大多用于捕捉用户的交互意图以及识别相关几何特征及约束. 万昌江等[6]通过三维语义标注建立三维形体与本体之间的映射关联关系,实现三维形体知识库的构建;夏之祥等[7]通过装配语义生成、识别、确认和解算4个步骤,实现在虚拟环境中快速、准确地进行装配;Zhu等[8]基于语义模型捕获装配中的空间位置等语义实体的参数,减少构建模型的误差;Zhu等[9]使用三层结构的语义模型描述零件中的装配特征,确定零件装配位置,并用来自动生成运动仿真中的运动副. 俞琳[10]提出了典型装配工艺结构化描述方法,并构建了包含连接方式等信息的装配语义模型,实现了与三维模型的信息关联.
以上研究关注点主要是通过装配语义推理零件间约束关系,从而完成产品的装配设计,但是应用于装配仿真缺少了对零件装配的约束顺序的推理,并且由于装配过程仿真涉及零件的运动方式,用于装配仿真的语义建模需要根据不同的装配关系进一步分类表达. 本文按照装配连接与配合方式的不同,划分了航天产品生产中的四类典型装配操作并对装配特征进行了参数化表达;通过匹配装配语义的装配特征信息和几何图元信息,实现了装配语义层次化解析,根据装配操作的类型确定装配约束关系给定的顺序和运动方向,生成相应的位姿变化矩阵,驱动零件完成基于装配语义的产品装配过程仿真.
1 典型装配操作分析
1.1 典型装配操作类型
装配工艺通常是装配设计意图的自然语言描述. 装配操作是装配工艺的核心,它描述了装配对象的运动过程,是装配工艺的执行单元. 通过对航天复杂产品装配工艺文件分析和整理,提取出装配工艺设计中典型装配操作,按照装配连接与配合方式的不同分为螺纹联接类、销键配合类、传动类、轴孔固定类4类装配操作,在此基础上将4类操作再次细分,具体分类如图1所示. 对装配语义的总结和提取,有利于实现历史工艺的知识重用.

图1 典型装配语义Fig.1 Typical assembly semantics
1.2 装配特征的参数化表达
根据上文分析总结的典型装配操作语义,将4类操作中的装配特征分别进行参数化表达,描述零件间的装配关系,其具体内容如下.
① 螺纹联接类装配特征K1的参数化表达式为
K1={K1m|K1m={Tym,Apm,Lpm,Dpm,Scm,Gcm},
m=1,2,…,N1}
(1)
式中:K1为总数为N1的螺纹联接类装配特征的集合;对于集合中第m个特征K1m;Tym为装配操作类型;Apm为轴向定位参数;Lpm为周向定位参数;Dpm为基准线、面参数;Scm为是否存在螺纹及螺纹特征;Gcm为装配对象或资源的几何图元参数集合.
② 销键配合类装配特征K2的参数化表达式为
K2={K2n|K2n={Tyn,Apn,Lpn,Dpn,Fkn,Gcn},
n=1,2,…,N2}
(2)
式中:K2为总数为N2的销键配合类装配特征的集合;对于集合中第n个特征K2n;Tyn为装配操作类型;Apn为轴向定位参数;Lpn为周向定位参数;Dpn为基准线、面参数;Fkn为是否存在键槽特征和销孔特征;Gcn为装配对象或资源的几何图元参数集合.
③ 传动类装配特征K3的参数化表达式为
i=1,2,…,N3}
(3)
④ 轴孔固定类装配特征K4的参数化表达式为
j=1,2,…,N4}
(4)

装配对象或装配资源的几何图元参数集合Gc的具体表达式为
Gc={Gci|Gci={Aoi,Aci,Adi},i=1,2,…,Na o}
(5)
式中:Nao为使用到的几何图元总数;对于集合中第i个元素:Gci为参与该装配操作的模型基本图元的几何约束元素;Aoi为装配对象上几何图元类型,主要包括点、线、面、局部坐标系、世界坐标系等;Aci为几何图元间的约束类型,如点点重合、点面重合等;Adi为几何图元的参数化表示.
2 装配语义层次化解析
为了实现装配仿真的语义驱动,需要将装配特征中的几何约束信息和配合关系转换为对应模型间几何约束信息. 本文提出了装配语义层次化解析方法,其传递过程如图2所示.

图2 装配操作语义层次化解析Fig.2 Hierarchical analysis of assembly operation semantics
装配语义层次化解析方法,是将装配操作信息从语义层到特征层再到几何层进行解析. 其中,语义层包括提取到的典型装配语义,以文字的形式存在,以词库的形式保存在数据库中;特征层是将语义层中描述的装配特征转化为约束特征信息,约束特征是指模型之间的贴合、对齐、相切等配合关系;几何层描述参与装配操作的模型的基本几何图元信息,包括组成装配模型的基本几何图元和三角面片元素,三角面片包括点、线、面等信息.
2.1 装配语义中装配特征信息匹配推理
对装配语义中蕴含的装配特征对进行匹配推理,确定装配特征的参数信息. 装配特征信息主要分为两类,一类是描述其所属装配语义类型、配合方式、有无螺栓等基本参数信息,另一类是描述装配特征中执行对象的几何图元信息和几何约束信息,本文将上述推理过程分为两个推理流程:装配特征基本信息参数匹配推理和装配特征几何图元信息匹配推理.
装配特征基本参数信息匹配推理方法的目的为确定装配特征类别,获取基本参数. 匹配推理的主要流程为:获取待验证装配特征,与典型装配语义的装配特征比较,若步判断其属于某一类特征,对比确定待验证装配特征中是否有该类型装配特征的定位信息与相关参数,若匹配成功则将其存储下来. 对比所有类型装配特征,获得所有成功匹配的装配特征.
通过基本参数信息匹配推理会得到多个基本参数信息相似的目标装配特征. 装配特征几何图元信息匹配推理通过匹配装配资源、主动装配对象、被动装配对象三个执行对象的几何图元信息确定最终装配特征. 匹配推理的原理为:遍历装配资源、主动装配对象和被动装配对象的几何图元集,分别计算各自几何图元包围球中心相对于装配操作语义对应的局部坐标系原点的位置向量,以及几何图元局部坐标系平均位置在世界坐标系下的位置向量. 计算以上三个执行对象的几何图元在世界坐标系下平均位置组成的三角形的面积. 从目标装配特征列表中选取面积最小的装配特征,作为最终匹配的装配特征.
2.2 装配特征中几何约束信息解析与空间位姿求解
2.2.1装配特征的几何约束解析
在虚拟装配环境中,装配模型间的约束关系最终体现在装配模型几何图元的约束关系,本文提出了面向空间位姿求解的装配特征中几何约束解析算法,其基本步骤为:
① 获取装配特征中装配资源、主动装配对象、被动装配对象的几何图元参数信息集.
② 获取被动装配对象在世界坐标系的中心线向量和基准面位置向量,计算两向量夹角.
③ 遍历主动装配对象与装配资源的几何参数信息集,获取执行对象的线参数向量列表和面参数列表,从两表中各选取出一个向量计算夹角,得到夹角列表.
④ 遍历夹角列表,选取与被动装配对象夹角相等的夹角,得到该夹角对应的线向量和面向量,与被动装配对象几何信息组合得到相应约束信息并传入装配语义特征集.
2.2.2执行对象的空间位姿变换
装配语义描述的装配过程是执行对象包含的几何图元不断满足几何约束的过程,根据几何约束的位置信息,通过对执行对象几何图元的位姿变换,就可以驱动装配模型完成装配过程仿真. 装配语义中执行对象几何图元的运动参数Ap可以表示为一个四元组:
(6)

3 装配语义驱动流程
驱动的主要流程为:将装配操作语义描述信息与装配实体库信息进行匹配,确定装配特征并从装配约束库中匹配外部约束信息,根据装配特征及约束信息按装配路径库中封装的装配路径完成仿真,具体流程如下图3所示.
其中装配实体库是指装配对象、装配资源等模型库;装配路径库是前文提取的装配语义中的路径的关系指定;内部约束是指在装配实体库中,根据装配语义的描述,待装零部件模型及相关的装配资源进行信息匹配的分组;外部约束是指根据装配约束库的进行设定,是两装配零部件间的外部位姿定位的基础.

图3 装配操作语义驱动流程Fig.3 Process of assembly operations driven by assembly semantics
4 系统开发与实例验证
基于提出的面向典型装配操作语义的复杂航天产品装配仿真生成方法,开发了语义驱动的虚拟装配仿真系统,该系统基于DELMIA二次开发,采用COM组件的方式实现. 该系统以零部件模型、工艺文件等数据为输入,进行装配工艺文件解析、关键装配要素提取、典型装配操作封装、装配仿真快速生成等环节,实现快速的虚拟装配仿真. 以某型号卫星导航仪的装配工艺为例,对系统的功能进行验证. 使用的工艺语句描述为:用M4-12螺钉将主陀螺#TL-2沿着轴线-4方向安装到底座#DZ-2的左上孔-32处. 处理过程如下:
① 改进TF-IDF算法的语义要素提取方法,对上述工艺语句进行解析处理,提取工艺语句中的语义要素信息,其具体内容如表1所示.

表1 语义要素信息
② 将需要仿真的装配对象和装配资源模型导入虚拟装配系统中,利用装配要素与仿真环境关联算法,将工艺语义信息转化为仿真环境中的参数信息,如图4所示,寻找到工艺语句描述的底座、陀螺、螺钉模型.

图4 装配零部件参数Fig.4 Assembly parts parameters
③ 装配操作信息匹配推理与装配动作参数信息求解. 工艺语句中描述的装配操作为“安装”结合螺钉、螺孔等装配资源信息,匹配出与之对应的典型装配操作为螺纹联接-螺钉联接,其语义参数信息如下式(7)所示,推理出的装配操作参数如表2所示.
(7)
式中:语义信息集T包含识别信息TID,装配对象信息TEO,约束信息TCon以及几何图元信息TGc. 对于TID:idText为装配操作的具体描述,Screw表示此装配过程为螺钉安装;TEO为所有装配资源(螺钉)RE、主动装配对象AP和被动装配对象PC的集合;TCon中包含装配资源上的线参数Lre、面参数Fre,主动装配对象上的线参数Lap、面参数Fap和被动装配对象上的基准线参数Clpc、基准面参数Dapc组成的线线约束(Lre-Lap-Clpc)和面面约束(Fre-Fap-Dapc);对于TGc:dre为螺钉螺纹的工程直径;lre为螺钉的长度;bre为螺纹部分长度;dap为主动装配对象上孔的直径;lap为主动装配对象上通孔长度;dpc为被动装配对象上螺纹孔的直径;lpc为被动装配对象上螺纹孔深度.
表2 装配仿真过程中装配操作参数信息
Tab.2 Assembly operation parameter information during assembly simulation

编号语义描述代号参数1底座#Dizuo-32Base2主陀螺#Tuoluo-2Gyro3螺钉#Luoding-M4-12Screw4底座螺孔中心线#Axis-32-4Cl15主陀螺螺孔中心线#Axis-2-4Cl26螺钉中心线#Axis-12-4Cl37底座孔上基准面#Face-top-32-4F18主陀螺上基准面#Face-top-2-1F29主陀螺下基准面#Face-bottom-12-1F310螺钉下基准面#Face-bottom-12-1F4
④ 装配操作中几何约束信息解算. 结合装配对象/资源模型的几何参数信息,结合典型螺钉联接中的工程约束信息,可以解算出工艺语句中装配操作的几何约束信息如表3所示.
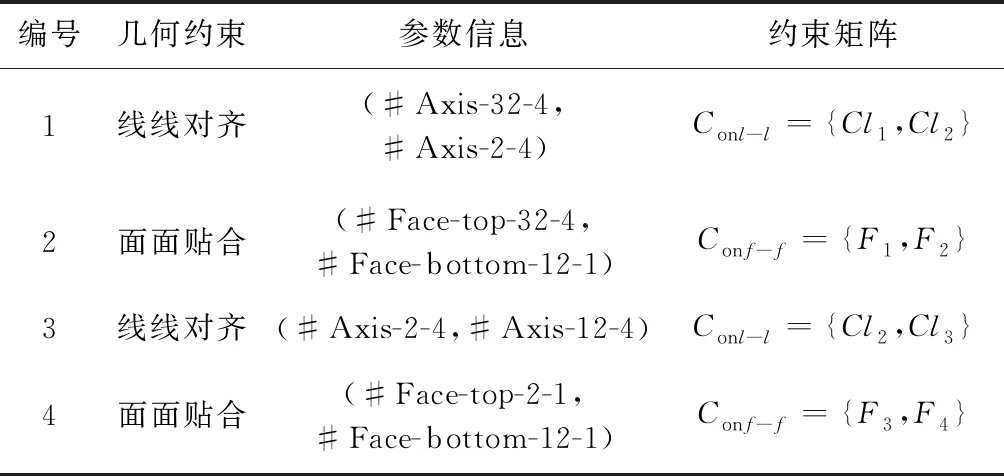
表3 装配操作几何约束
⑤ 按照装配工艺仿真的参数信息和驱动算法驱动模型完成装配工艺仿真,如图5所示.

图5 装配工艺仿真过程Fig.5 Assembly process simulation process
5 结 论
本文首先对航天产品装配工艺中的典型的装配语义进行提取和分析,将其中装配操作进行分类,在将装配特征进行分类参数化定义基础上,使用层次化解析方法确定装配特征的基本信息参数和几何图元信息. 然后对装配特征中的几何图元信息进行解算,求解出执行对象间的装配几何约束信息,基于几何约束根据装配工艺中装配路径、顺序求解出执行对象的空间位姿变换矩阵,按照封装的典型装配操作仿真数据,实现了基于装配语义的快速装配仿真. 最后,以某型号卫星导航仪的装配工艺为例,对装配工艺解析和装配语义驱动的装配仿真方法等进行了验证. 结果表明,所提出的基于装配语义的航天产品装配仿真方法可以完成装配过程仿真,减少人员操作,提高了装配仿真效率.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
科学技术创新(2022年7期)2022-04-02
保健与生活(2020年1期)2020-05-07
小学阅读指南·低年级版(2017年1期)2017-03-13
科技资讯(2016年9期)2016-05-14
长江学术(2016年4期)2016-03-11
人生十六七(2015年6期)2015-02-28
长江学术(2015年1期)2015-02-27
计算机辅助工程(2012年5期)2012-11-21