汽轮发电机组超速保护对机组热力系统的影响
2021-02-07 11:55何青路唱罗宁杜冬梅
北京理工大学学报 2021年1期
何青, 路唱, 罗宁, 杜冬梅
(1. 华北电力大学 能源动力与机械工程学院,北京 102206;2. 中国电建集团西北勘测设计研究院有限公司,陕西,西安 710065)
为解决电力资源分布与消费地区分布不平衡的矛盾需要进行电网之间的互联[1-3]. 随着单机容量的增大和电网中并网机组数量的增加,电力系统的运行环境越来越复杂,对电力系统的安全性和稳定性也提出了更高的要求. 并网机组发生扰动会影响发电质量,使电网频率、功率等参数产生波动,甚至威胁电力系统的稳定及安全运行[4-6]. 目前,大型汽轮发电机组普遍采用具有超速保护控制功能的数字电液调速系统. 在汽轮机运行过程中,OPC系统接收转子转速的反馈信号,当检测到转速超过规定值时,OPC动作. 此时OPC将对机组调节系统进行控制,强行关闭高、中压缸调节汽门,在转速降低至安全范围后,调节系统恢复对转速的控制,因此OPC能够有效地抑制机组超速[7-10]. 在实际运行中,要根据电网需求设置OPC控制策略,否则不但不能有效控制转速,还会造成调节汽门的频繁开关,对机组轴系和热力系统产生冲击,影响机组的运行,对机组寿命产生损耗,严重时还会使电网频率发生振荡[11-13].
汽轮发电机组自动保护系统能够保证机组在各种工况运行时满足外界负荷的要求,维持机组稳定运行;在机组发生故障时自动调整工况,以防发生更严重的事故,功率负荷不平衡保护是其中一种保护措施. 当电力系统发生故障,如大型用电设备故障、并列运行线路故障断电时,电网负载将瞬间减小,为了避免机组发出的功率与电网所需电功率不匹配而发生事故,PLU保护系统动作,控制机组迅速甩负荷,缓解机组输出功率与负载的不平衡,从而抑制转子转速飞升. PLU保护的逻辑设置过于简单,测量环节可靠性差;过于谨慎,则会经常发生误动导致机组跳闸事件[14-15]. 为研究PLU的保护作用,本文对该机组进行了建模仿真. 建模分两种情况,一种情况是DEH系统模型中既有PLU保护,又有OPC;另一种情况是DEH系统模型中只有OPC,而无PLU保护. 主要模拟机组在甩负荷时、转子超速后两种情况下PLU保护和OPC的动作,分析超速保护动作对机组热力系统的影响,并且对PLU保护存在的合理性进行分析.
1 汽轮发电机组及其控制系统模型
1.1 蒸汽容积模型
蒸汽在汽缸内的流动做功过程可以用容积方程来描述,汽轮机单缸容积模型如图1所示[16],根据阀门开度的变化能够求出汽功率的变化.
图1中T0为汽缸的容积时间常数,表示进入汽缸的蒸汽容积效应对进汽的影响,一般情况下约为0.1~0.3 s,可以通过式(1)求得.
(1)
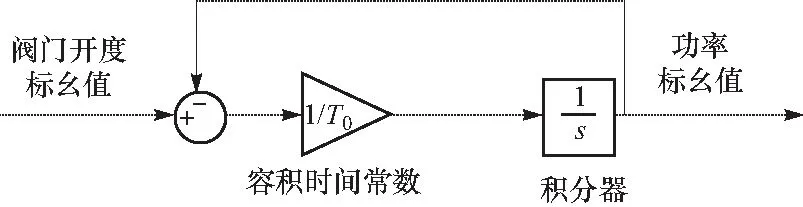
图1 蒸汽容积效应模型Fig.1 Steam volume effect model
式中:l为汽缸进汽管道长度,m;A为进汽管道横截面积,m2;v0为蒸汽在管道中的设计流速,m/s;ρ0为额定工况下蒸汽密度,kg/m3;n为气体变化过程的多变指数.
1.2 汽轮机转子模型
转子的运动状态由蒸汽转矩、负载转矩和摩擦转矩三个参数共同决定. 汽轮机发电机的转子方程为
(2)

对式(2)两端进行拉普拉斯变换,得到

(3)
根据式(3),可以用图2来实现汽轮机转子仿真模型.
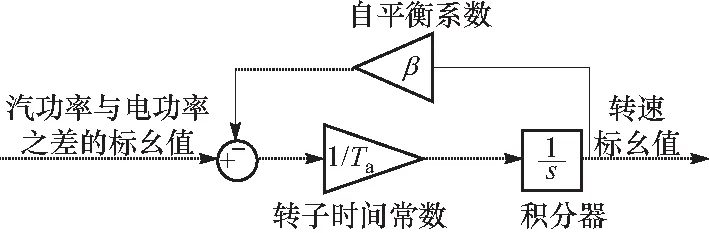
图2 转子仿真模型Fig.2 Rotor simulation model
1.3 DEH系统模型
DEH系统时刻监测和采集机组的运行参数,保证机组在任何工况下都能够稳定运行.DEH系统通过对汽轮机高、中压缸调节阀的开度控制来实现流量的变化[17],进而控制汽轮机转速、负荷以及主蒸汽压力.DEH控制系统框图如图3所示.
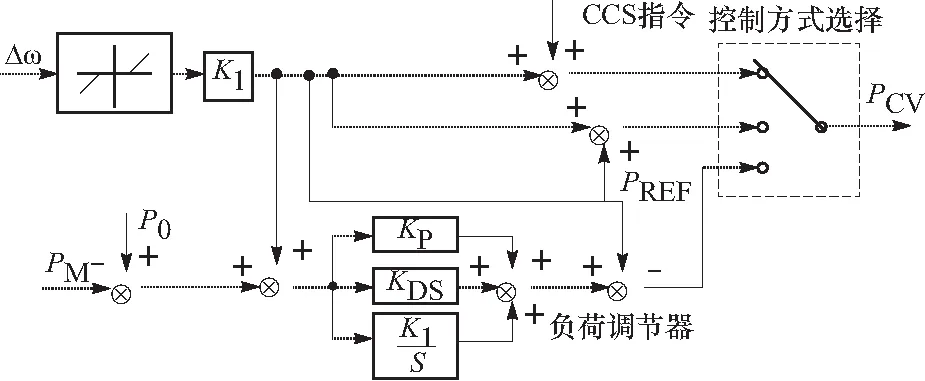
图3 DEH控制系统框图Fig.3 Diagram of DEH control system
1.4 OPC模型
OPC是汽轮机保护系统的功能之一,当机组甩负荷或其他事故导致转速超过设定值时,触发OPC动作,控制机组关闭调节阀门或主汽阀门,减小输出功率,使转速降低到安全范围内.OPC动作逻辑如图4所示,在机组甩负荷之前,OPC输出值为0,在机组甩负荷信号发出后,OPC模块对输入的转速信号进行判断.OPC保护动作分为两种情况:
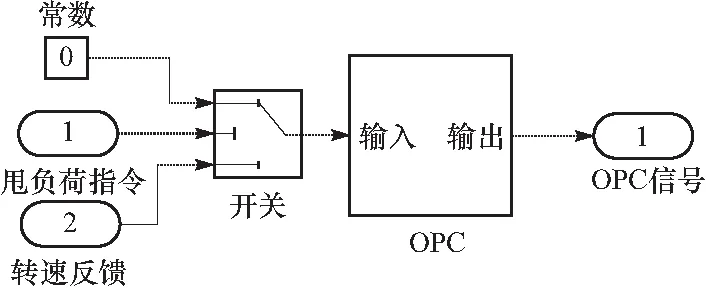
图4 OPC动作逻辑Fig.4 OPC action logic
① 当汽轮机转速升高至额定转速的103%(3 090r/min)或者转子加速度大于某一值时,OPC迅速动作并发出报警信号,高、中压缸调节阀关闭,各级回热抽汽的逆止阀也迅速关闭;
② 当汽轮机转速达到额定转速的110%(3 300r/min)时,OPC将迅速关闭高、中压主汽门和高、中压调节汽门,遮断汽轮机进汽,以防止引起重大事故.
1.5 PLU模型
PLU保护动作逻辑为:当机械功率与发电机功率的差值大于额定值的39.5%,且发电机功率发生了瞬间减少(变化率大于32.2%/10ms)时,触发PLU保护动作,快速关闭高、中压缸调节阀,高压缸和中压缸的主汽阀保持不变;当机械功率与发电机功率差值小于39.5%时,PLU动作延时3s后复位,调节阀门重新开启,并恢复由调节系统控制.PLU逻辑简图如图5所示.
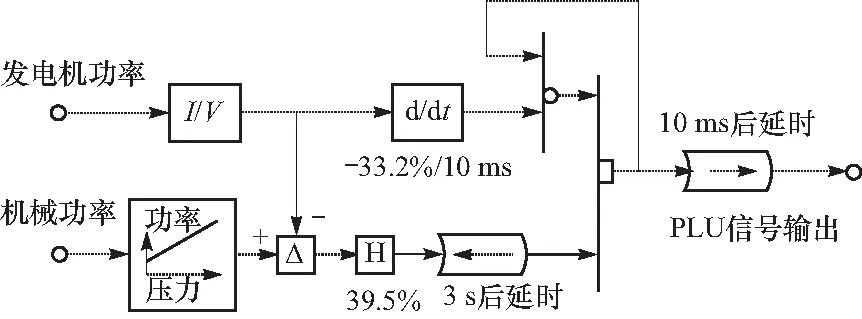
图5 PLU逻辑简图Fig.5 PLU logic diagram
2 系统模型及参数确定
为了明确PLU在机组超速保护中的作用,建立两种模型进行对比:一种是既有PLU保护又有OPC的系统,另一种是只有OPC而不含有PLU保护的系统,分别模拟机组甩负荷后超速保护的动作情况,分析保护动作对机组热力系统的影响. 根据项目要求以及机组实际情况,结合第1节中所有子系统模型建立整体模型如图6所示. 模型中的主要参数如表1所示.
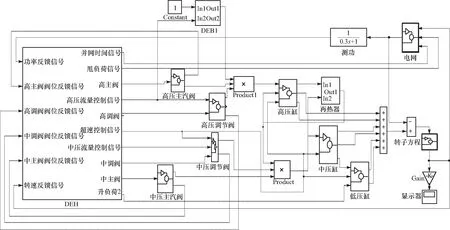
图6 系统模型Fig.6 The system model
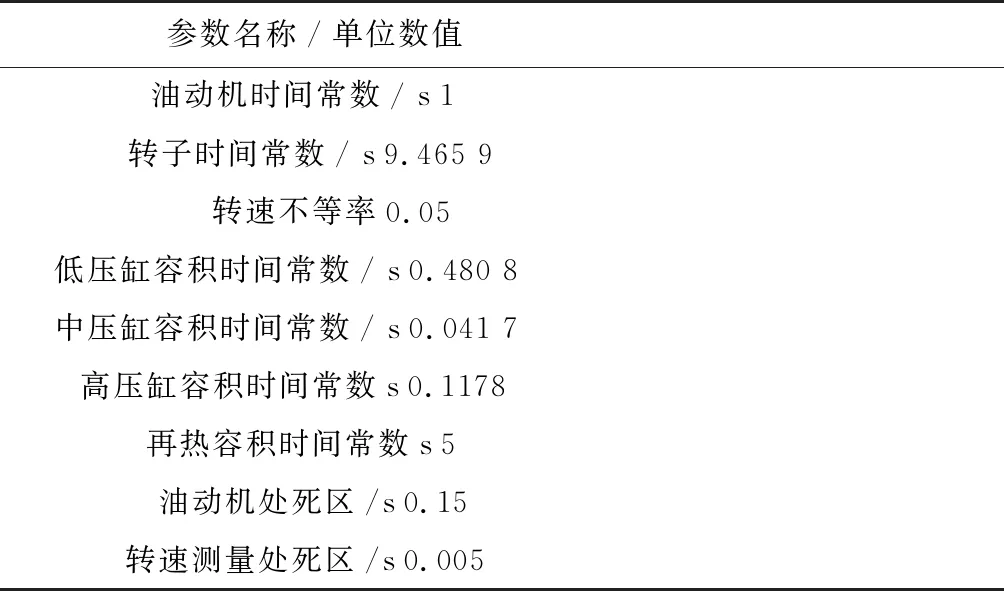
表1 系统模型主要参数
3 仿真过程及结果
3.1 仿真条件
总仿真时间为2 000 s;并网时间为100 s;升负荷时间为150 s;单阀顺序阀切换时间为300 s;主蒸汽压力影响投入时间为800 s;甩负荷时间为1 400 s.
在整个仿真过程中,PLU和OPC模块的输出信号为0和-1两个值:当机组正常运行时,PLU和OPC输出为0;当甩负荷导致转速飞升触发PLU和OPC动作时,PLU保护和OPC的值突变为-1.
3.2 PLU保护动作
机组在整个模拟过程中PLU模块的输出信号如图7所示. 由图7(a)可以看出,当机组正常运行时,PLU模块输出值为0,在1 400 s时机组开始甩负荷,触发PLU动作,PLU保护模块的输出值随之由0变为-1. 将PLU动作过程放大至图7(b)可知,PLU动作信号延时2 s后恢复至0值. 进一步放大PLU信号至图7(c),可以看出PLU动作开始时间为1 400.14 s,即机组甩负荷信号发出0.14 s后PLU开始动作.
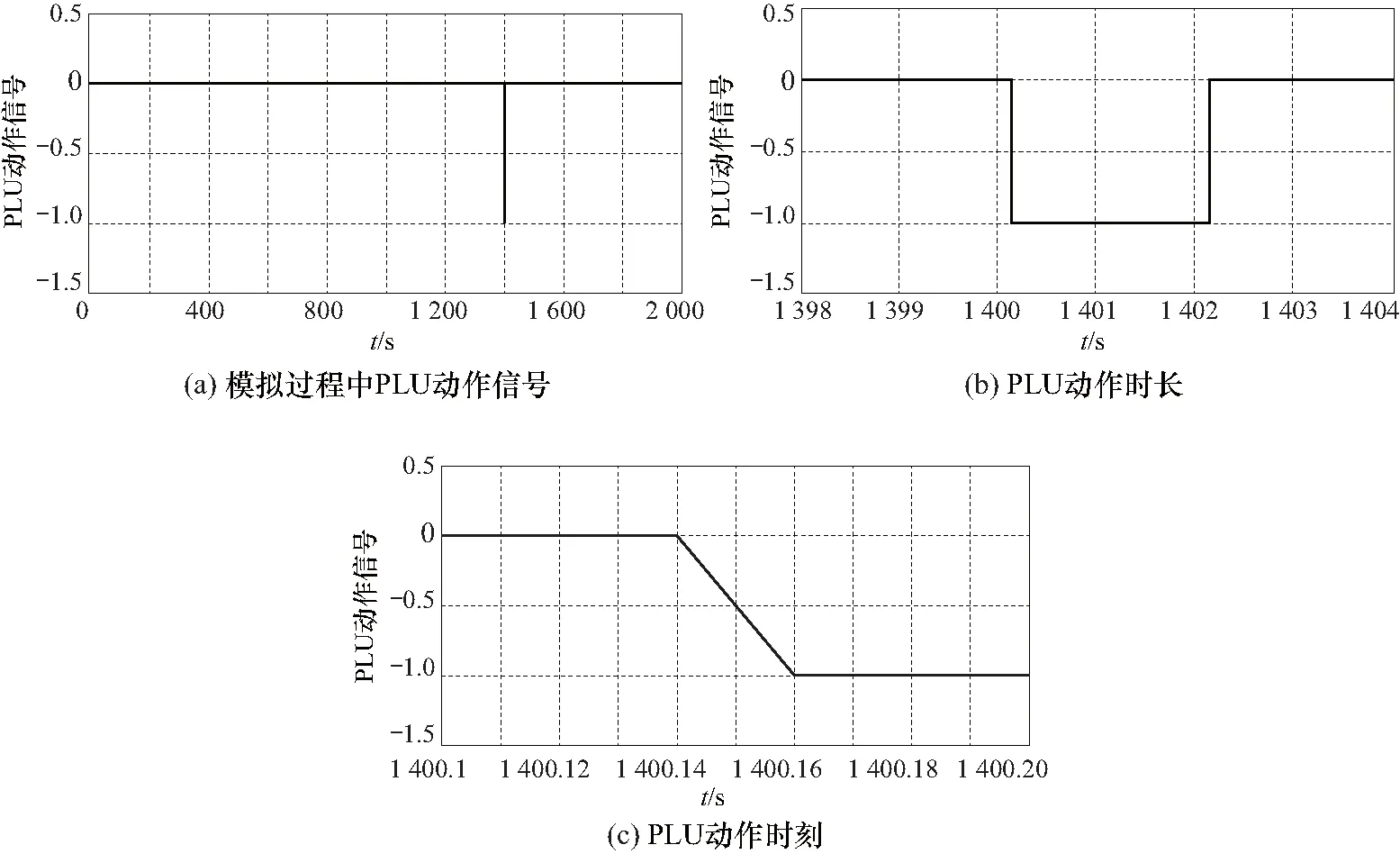
图7 PLU动作信号Fig.7 PLU action signal
3.3 OPC动作信号
图8和图9分别为有无PLU保护模块两种情况下,整个模拟过程中OPC模块输出信号的变化. 由图8可以看出,在无PLU保护的情况下,机组在0~1 400 s之间处于正常运行状态,经历升转速、并网、升负荷、切换阀门的过程,最终稳定在额定工况下运行,因此OPC输出信号始终为0. 1 400 s时甩负荷信号投入,机组负荷迅速降低,转速迅速上升,当达到OPC的设定值即额定转速的103% (3 090 r/min)时OPC保护开始动作. 由图8(c)可知,OPC开始动作时间为1 400.29 s. OPC模块动作后调节阀关闭,阀前蒸汽压力迅速增高,进入汽轮机做功的蒸汽流量减小,汽轮机转速随之降低. 当转子转速降低到3 028 r/min以下后,OPC动作结束,OPC输出信号恢复至0,调节阀门随之打开,并恢复由调节系统控制. 由图8(b)可以看出,OPC信号持续了13 s左右.
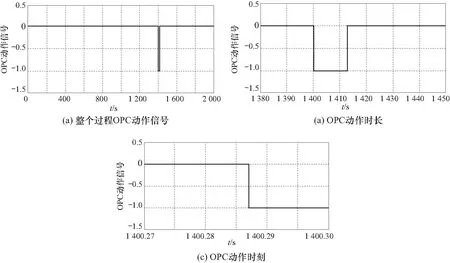
图8 无PLU保护时OPC动作信号Fig.8 OPC action signal without PLU protection
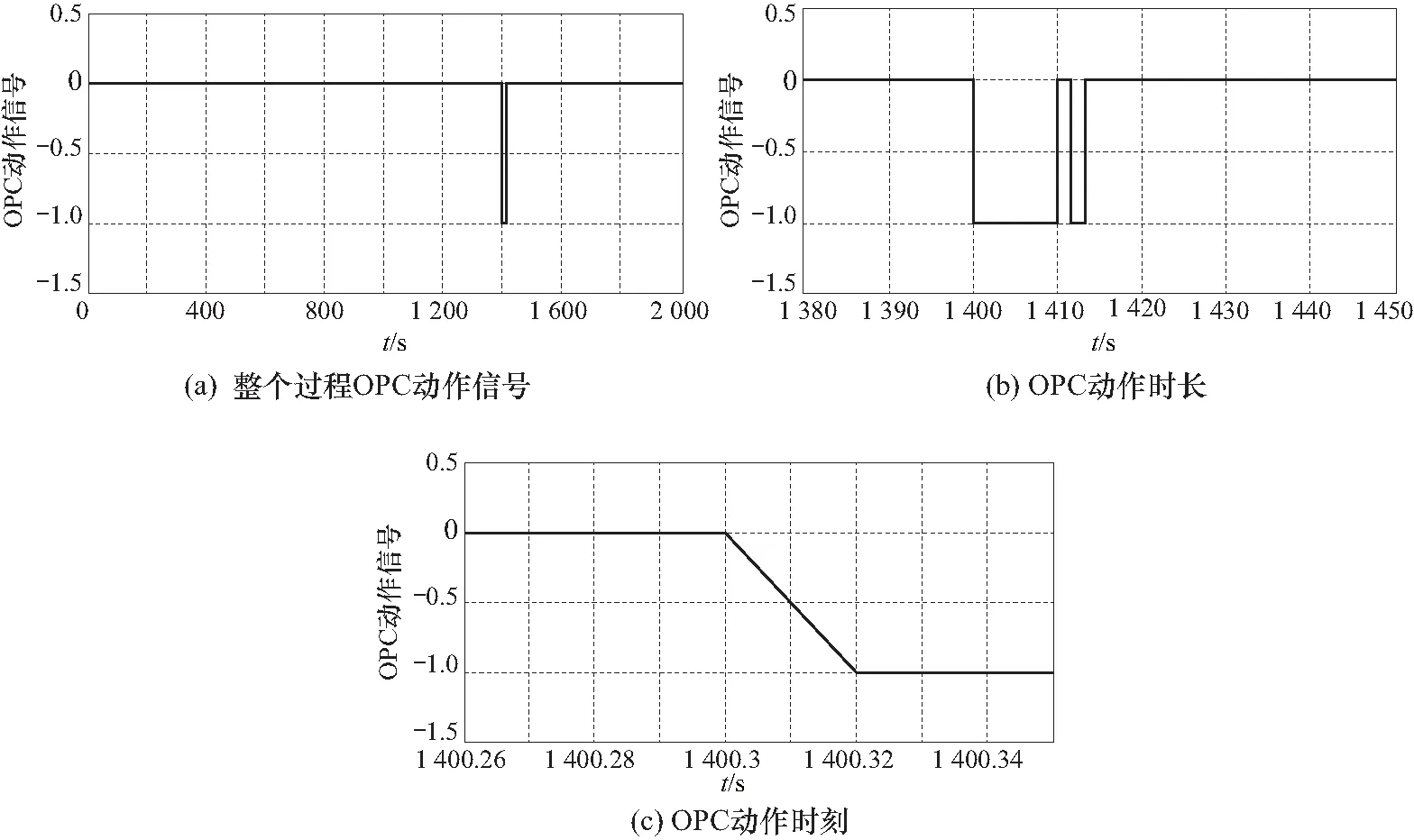
图9 有PLU保护时OPC动作信号Fig.9 OPC action signal with PLU protection
由图9可知,在有PLU保护的情况下,起始阶段与无PLU保护的情况相同,1 400 s时甩负荷信号投入,汽轮机负载突然降低,负载与机组功率的差值达到了PLU保护的设定值,PLU开始动作,动作时刻为1 400.14 s. 同时由于负载减小,汽轮机转速迅速上升,超过了额定转速的103%(3 090 r/min),导致OPC动作开启. 由图9(c)可以看出,OPC动作开始时刻为1 400.3 s,即在甩负荷信号发出0.3 s后开始动作,较PLU动作慢了0.16 s. 由于PLU保护和OPC保护同时动作,使得调节阀关闭,转速逐渐下降. 由图9(b)可知,OPC第一次动作持续了10 s,1 410 s时OPC动作结束,此时调节阀恢复开启状态. 由于调节阀的开启,转速再次上升至3 090 r/min,触发了 OPC的第二次动作,阀门随之关闭,直至转速低至3 028 r/min转速以下且不再上升,OPC才停止动作.
3.4 模拟结果分析
模拟得到的机组主蒸汽压力的变化如图10所示. 1 400 s前机组正常运行,主汽压力的标幺值保持在1不变,即这个阶段内主汽压力为额定值. 1 400 s时机组甩负荷,机组输出功率大于负载引起转速飞升,有PLU保护的机组PLU和OPC相继动作,无PLU保护机组的OPC动作,阀门迅速关闭,主汽压力迅速升高,由于锅炉的动态响应缓慢,所以主汽压力经过波动最后会缓慢下降达到稳定. 由于锅炉基本参数相同,阀门也是完全关闭,因此所有情况的主汽压升高值差距不大,均为额定压力的1.146 5倍左右.
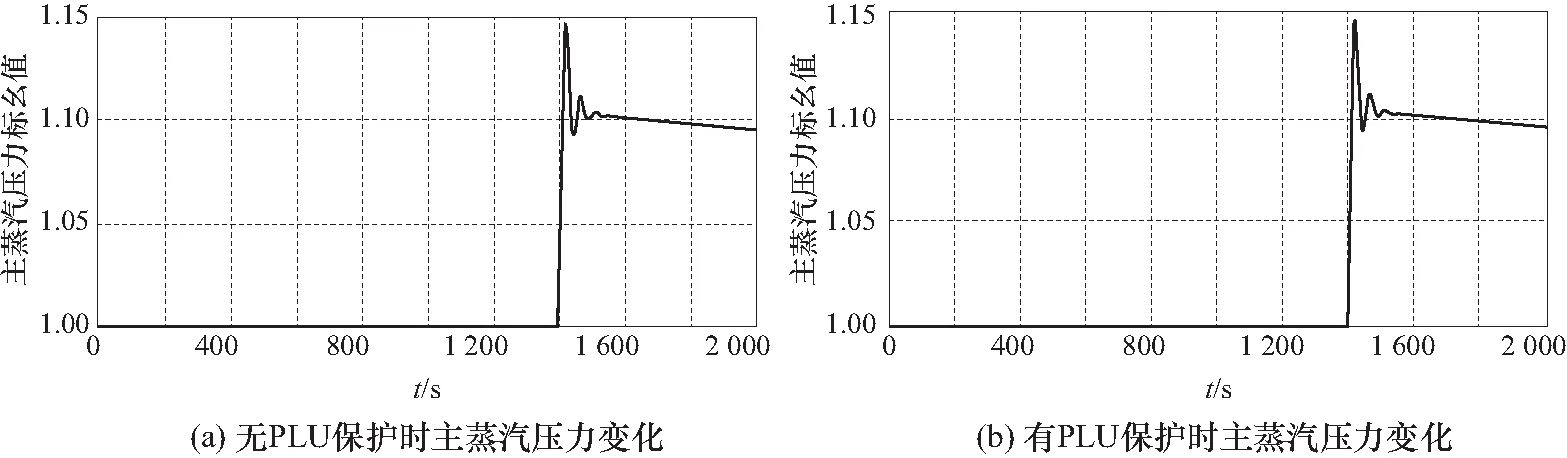
图10 主蒸汽压力变化曲线Fig.10 Changes of main steam pressure
4 结 论
两个保护动作PLU和OPC在机组转速飞升时均能起到抑制超速的作用. 当机组负荷突变为0,转速超速时,PLU和OPC均发生动作,且PLU先于OPC0.16 s动作. 当机组超速保护动作时,快速关闭高、中压缸调节阀门,会导致阀前主蒸汽压力迅速升高,对机组阀门产生一定的冲击力;汽轮机各级由于阀门的突然关闭,会使得级前和级后存在很大的压差,对转子造成疲劳损伤,严重降低机组的有效寿命. PLU存在的唯一优点在于机组超速时能早于OPC动作,但两种情况对控制超速的效果相差不大,所以两种保护措施对于甩负荷时转速的控制上功能重叠. 相比较而言,误动带来的危害更大,PLU频繁动作甚至可能会导致机组跳闸、全厂失电等危险的事故,严重影响电厂的正常运行.
猜你喜欢
吉林电力(2022年1期)2022-11-10
流程工业(2022年3期)2022-06-23
流程工业(2022年5期)2022-06-23
科学文化评论(2021年5期)2021-04-23
人民交通(2020年2期)2020-04-16
装备维修技术(2019年1期)2019-09-10
科技风(2019年36期)2019-01-13
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
军事文摘·科学少年(2017年1期)2017-04-26