隧道点云中轴线提取方法及工程应用
2021-02-10 02:06张健珲宋袁龙
中国煤炭地质 2021年12期
张健珲, 宋袁龙
(中煤航测遥感集团有限公司技术发展研究院,西安 710199)
0 引言
三维激光扫描技术(Light Deteation and Ranging,LiDAR)是一种集激光扫描仪(LaserScanner,LS)、惯性导航系统 (Inertial Navigation System,INS)、全球导航卫星系统(Global Navigation Satellite System,GNSS)和高分辨率数码相机等技术于一身的光机电一体化集成系统,通过高速激光扫描,可以大面积、快速、高分辨率地获取物体表面的三维坐标信息,是一种建立物体三维模型的全新技术手段[1-6]。
在隧道施工监控量测、变形分析、质量评定复测等相关研究过程中往往需要曲线来表征隧道实际走向,如何利用隧道点云提取高精度的中轴线具有重要的研究意义。卢小平等根据双向投影原理提取出三维中轴线,利用中轴线获得隧道横断面,旋转横断面进行椭圆拟合,继而进行隧道点云降噪处理[7]。李双将隧道看作圆柱进行处理,通过计算隧道重心和投影面与坐标轴夹角,进而提取中轴线,实现了最小距离投影算法的断面及隧道变形分析[8]。荆海峰联合高斯球法和圆柱拟合法提取隧道中轴线,进而提取隧道横断面[9]。托雷等使用最小二乘二阶曲线方程对中轴线进行拟合,利用双向投影法进行中轴线提取,最后对断面以中轴线为基准进行提取拟合[10]。程效军等对中轴线的隧道点云降噪方法进行了深入研究,对点云进行双向投影以便于提取中轴线,过程中使用了多项式对曲线进行拟合及插值,然后参考中轴线对点云进行分割,计算得到点至中轴线的距离,从而可以设定阈值降噪[11]。
传统方法只能获得隧道被监测位置处的断面变形信息,使用LiDAR可以获得隧道全断面状态,获得隧道任意位置断面信息。中轴线提取方法首先对采集的隧道点云进行网格划分提取边界点,对边界点构建不规则三角网( Triangulated Irregular Network,TIN),并进行中轴线粗提取,利用粗提取的中轴线对隧道点云进行切割提取断面,最后使用随机抽样一致算法(Random Sample Consensus,RANSAC)空间拟合椭圆找出每个断面的中心点[12-13],进而完成中轴线精细化提取。该方法提高了自动化程度和适用性,通过实际工程验证,成果完全满足隧道施工、复测及监测等相关需求,具有一定的应用价值。
1 隧道点云中轴线提取方法
1.1 中轴线提取流程
中轴线提取采用先粗提取后精细化提取的方式进行,粗提取过程首先对隧道点云进行格网划分提取外侧点云,然后利用外侧点云构建TIN网提取边界点,对边界点进行排序,遍历每个边界点找到另一侧邻近点求取中点,连接各个中点,使用三次B样条曲线进行插值,得到粗中轴线。精细化过程首先利用粗中轴线对隧道点云进行切割提取断面,然后利用RANSAC空间椭圆算法提取每个断面的中点,连接这些中点,使用三次B样条曲线进行插值,得到精细中轴线。
1.2 中轴线粗提取
在进行隧道中轴线粗提取时分为水平(XOY)和竖直(XOZ)两个方向进行,以水平方向为例,首先通过格网划分提取外侧点云,对外侧点云进行离群点检测(SOR)滤波处理,使用滤波后的外侧点集选择合适的参数构建TIN,TIN上的点可视为边界点,选取一侧边界的点,利用kd-tree搜索另一侧最近点,可认为两点连线垂直于边界,两点连线的中点可视为中线点。依次遍历一侧边的点进行计算,获得初始水平中线[14]。使用同样的方法得到竖直方向上的(XOZ)初始水平中线,将两个方向的初始水平中线以X值为联系匹配重组,得到原始轴线,对原始轴线使用三次B样条曲线进行插值,得到粗中轴线,参考此粗中轴线对隧道点云进行切割,得到隧道断面,用于精细化中轴线的提取。
1.3 中轴线精细化提取
在进行结合上述步骤得到中轴线粗提取结果,此结果可以用于地铁隧道点云的切割,使用Ransac空间拟合圆柱进行中轴线的精细化处理。使用Ransac方法进行圆/椭圆拟合[15-18],随着时间的推移和环片周围荷载发生,隧道环片由初始的圆形结构逐渐向两侧扩张,顶部也会会发生沉降变形。本文通过隧道断面点云使用RANSAC和最小二乘法拟合断面,得到断面的椭圆信息,椭圆的一般方程为
Ax2+By2+Cxy+Dx+Ey+1=0
(1)
考虑到在大多数情况下隧道受力是相对均匀的,然而实际的点云存在微差。严格来说盾构提取的断面并不是标准的椭圆,所以断面点坐标代入椭圆方程一定会存在偏差,假设偏差Vi的公式为
(2)
式中:i=1,2,3…,n。根据式( 2) 采用最小二乘法代入隧道断面点坐标,求得A、B、C、D、E等椭圆的一般参数,与断面点云最佳拟合的椭圆可以通过将椭圆的一般参数代入式( 1) 得到。
2 工程应用分析
2.1 工程概况
以西安地铁某段作为试验区,采集8站数据,每站点云数量约为2 000万(图1、图2)。以其中一站数据为例,扫描点数为21 035 489,以断面点数n大于1 000为条件,选取33 m长的隧道点云进行处理。
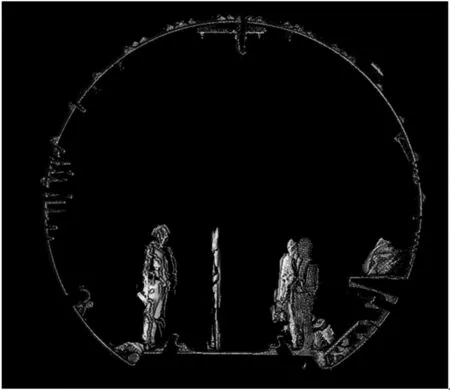
图1 隧道点云正视图Figure 1 Tunnel point cloud front view
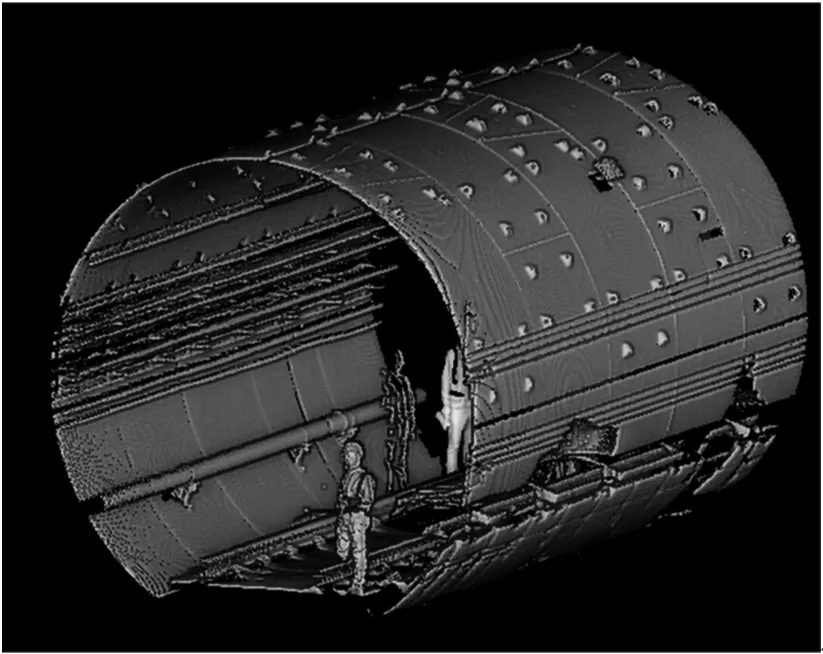
图2 隧道点云侧视图Figure 2 Tunnel point cloud side view
为了对比点云中轴线提取精度,使用全站仪断面法精密测量获取隧道中线点作为参考对照,采用LeicaTM30仪器,进行隧道断面测量。
对获取的隧道点云进行双向噪点剔除处理,剔除明显不属于环片壁的非点,滤波前如图3所示,滤波后效果如图4所示。
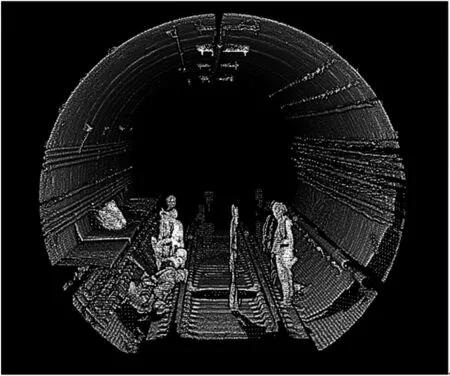
图3 隧道点云滤波前Figure 3 Tunnel view before point cloud filtering
图4 隧道点云滤波后Figure 4 Tunnel view after point cloud filtering
隧道点云经噪点剔除后就可以进行中轴线粗提取,在粗提取完成之后以隧道轴线方向设置不同的间隔,例如1.0 m,提取隧道断面,利用隧道断面拟合椭圆进行中轴线精细化提取。设置不同的间隔,将经过提取的中轴线上的点与断面仪精密测量得到的结果进行对比分析,中轴线提取误差分析如表1所示。
2.2 结果分析
对于粗提取结果,平面方向平均误差为7.1mm,RMSE值为7.2,高程方向为7.5mm,RMSE值为7.7。对于精细提取结果,在平面方向平均误差为3.6mm,RMSE值为3.7,高程方向为3.2mm,RMSE值为3.4。相对于粗提取,精细提取结果误差降低,精度提高明显。
在不同间隔条件下,虽然精细提取相对于粗提取精度提高幅度并不相同,但是经过精细提取的结果都能够满足隧道施工、复测及监测等需求,表明本提取方案具有一定的实用性和科学性。
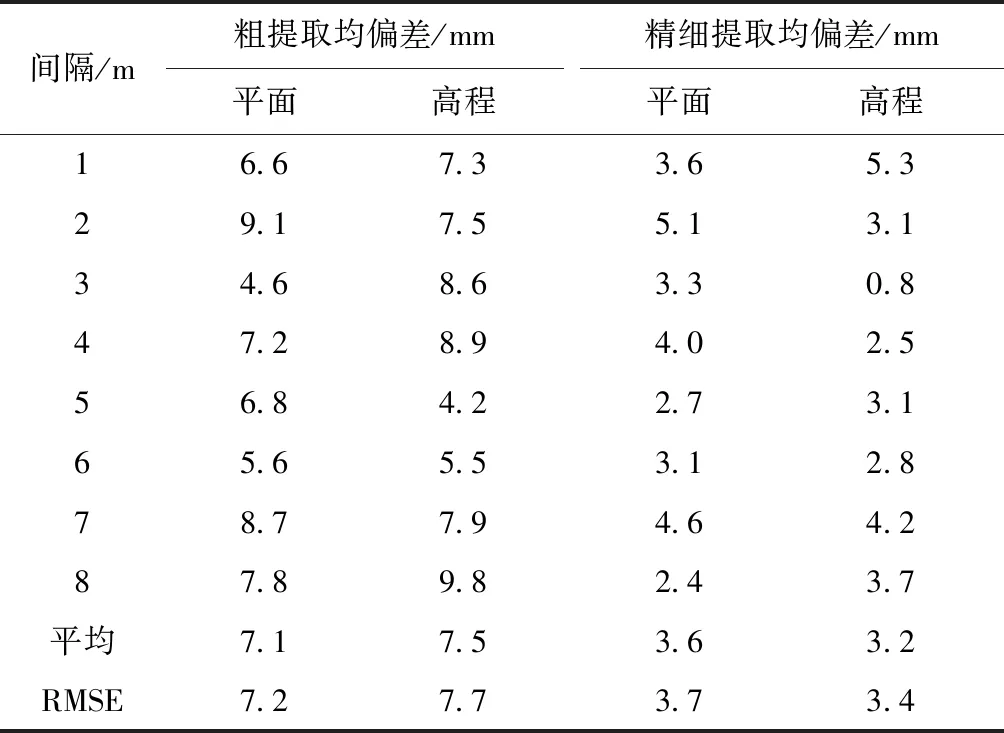
表1 点云中轴线提取误差分析
3 结论
针对隧道点云中轴线提取问题,提出对采集的隧道点云进行网格划分进行中轴线粗提取,再利用粗提取的中轴线对隧道点云进行切割提取断面,空间拟合椭圆,进而完成中轴线精细化提取。该方案在现有方法的基础上提高了自动化程度和适用性,通过实际工程案例分析,成果满足隧道施工、复测及监测等的需求,具有一定的应用价值。
猜你喜欢
数学杂志(2022年5期)2022-12-02
北京测绘(2022年10期)2022-11-04
激光技术(2021年5期)2021-08-17
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26
房地产导刊(2020年10期)2020-11-16
中学数学杂志(2019年1期)2019-04-03
郑州大学学报(工学版)(2017年2期)2017-05-18
福建中学数学(2016年4期)2016-10-19
电脑与电信(2014年6期)2014-03-22
中国工程咨询(2013年6期)2013-02-13