基于位置指纹的室内定位技术
2021-02-14 06:24马冀,田锦
电视技术 2021年12期
马 冀,田 锦
(金陵科技学院 网络与通信工程学院,江苏 南京 211169)
0 引 言
随着移动智能终端的普及和移动互联网的迅猛发展,基于位置服务的应用(如地图导航应用、摩拜单车、微博签到等)大量涌现。这些位置服务都是基于已经十分成熟的室外定位技术,如我国的北斗卫星导航系统、美国的全球定位系统(Global Positioning System,GPS)。但是,在室内环境中接收到的GPS信号非常微弱,甚至接收不到,致使这些成熟的室外定位技术无法直接运用到室内环境中,迫切需要研究新的室内定位技术[1]。
目前,室内定位技术总体分为三类,即几何定位方法、邻近定位方法以及指纹匹配定位方法。几何定位法是指利用接入点(Access Point,AP)与待测终端之间的距离,根据几何学的原理估计出待测终端的方法。邻近定位方法也可称为最近AP法,根据待测终端与一个或多个位置已知位置AP的邻近关系,将待测终端接收到的信号最强的AP的位置作为该待测终端的位置。位置指纹法用声学、光学、无线电等方面的特征指标参数来描述定位环境中的各个位置。定位时,利用在定位点采集的位置指纹与指纹数据库中的指纹进行匹配,确定待测终端的位置。
指纹定位法的优势在于,不需要建立信道参数模型来估计收发机之间的距离,不需额外开发硬件平台来估计信道参数因而减少了硬件开发的成本,甚至也不需要接入点具体的位置与布局,因此得到了广泛的应用。本文详细介绍基于多模指纹进行室内定位的具体方案,分析了由于无法采集到均匀的指纹信号而导致现有基于均匀栅格划分指纹定位方法无法有效应用在实际中的具体原因,并提出一种非均匀栅格量化的多模指纹定位的解决方案。
1 指纹室内定位基本原理与方案实现
1.1 基本原理
室内多模指纹定位系统的构成如图1所示。该系统包括移动客户端(智能手机终端)、服务器端(位置指纹服务器)及无线访问接入点(Access Point,AP)。客户端主要负责采集周边AP的无线信号强度,通过无线网络传输到后台指纹位置服务器,向该服务器提交信号特征。位置指纹服务器使用客户端采集的信号特征进行定位计算,获得移动终端的位置估计,并反馈用户位置到客户端[7]。
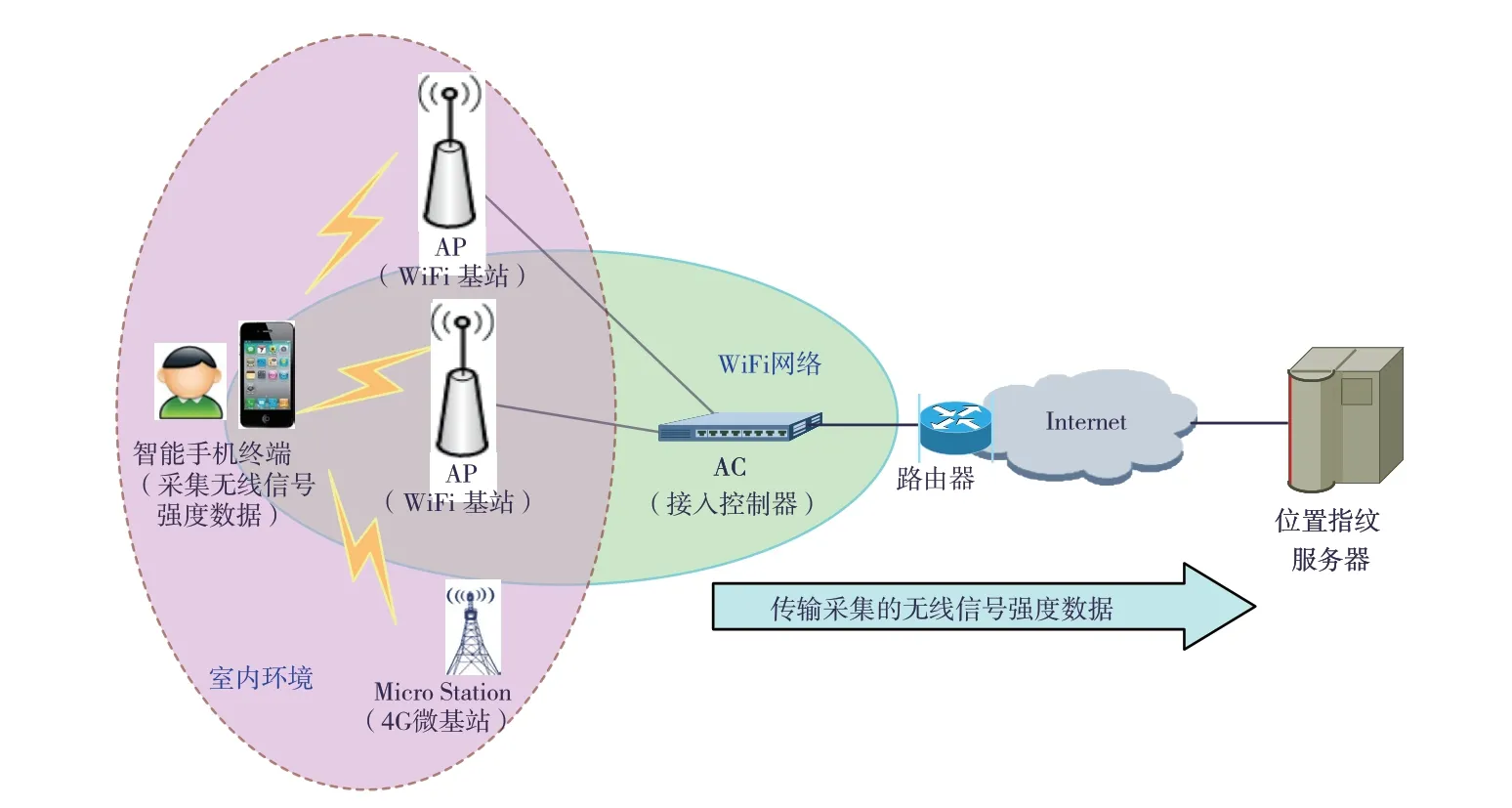
图1 室内多模指纹定位系统的构成
基于位置指纹的室内定位技术方案如图2所示。该方案采用WiFi无线信号作为位置指纹,将智能终端采集到的待定位点的WiFi站点名称和接收信号强度指示(Received Signal Strength Indication,RSSI)数据上传到位置指纹数据库,在数据库中查找与之最相近的数据记录,利用这些记录的位置坐标计算出待定位点的位置坐标,将位置坐标返回到客户端,确定待定位点所在的位置[8-9]。
1.2 方案实现
该方案的定位流程可分为WiFi信号部署、离线指纹采集以及在线实时定位3个阶段[10]。WiFi信号部署现场如图3所示。本实验部署了4个WiFi接入点(Access Point,AP)。

图3 WiFi AP现场部署
1.2.1 离线指纹采集阶段
在离线指纹采集阶段,采集WiFi AP无线信号的强度数据,建立位置指纹数据库。测试人员手持带WiFi通信接口的开发板终端,在目标环境的多个位置分别采集来自不同WiFi AP基站的RSSI信息,如图4所示。

图4 WiFi无线指纹库数据现场采集
将整个无线覆盖区域划分为多个均匀或非均匀的定位栅格。这些定位栅格坐标已知,称作参考点,记作(x,y)。在每一个参考点上,测试人员采样来自多个邻近WiFi AP的信号强度,形成一个一维向量,并与该参考点的坐标相关联,形成该参考点的位置指纹,如式(1)所示:

式中:n表示所监测到的WiFi AP数量,RSSIk表示第k个AP的信号强度值。将所有参考点的位置指纹存储于一个数据库中,形成一个二维矩阵。
1.2.2 在线实时定位阶段
根据待定位智能终端实时采集到的WiFi AP无线信号强度数据,形成该位置的指纹向量并上传到位置指纹服务器,如图5所示。服务器端通过指纹相似度匹配算法,将上报的位置指纹向量与数据库中每一条指纹记录相匹配,确定待定位智能终端的估计位置,并传给智能终端设备。
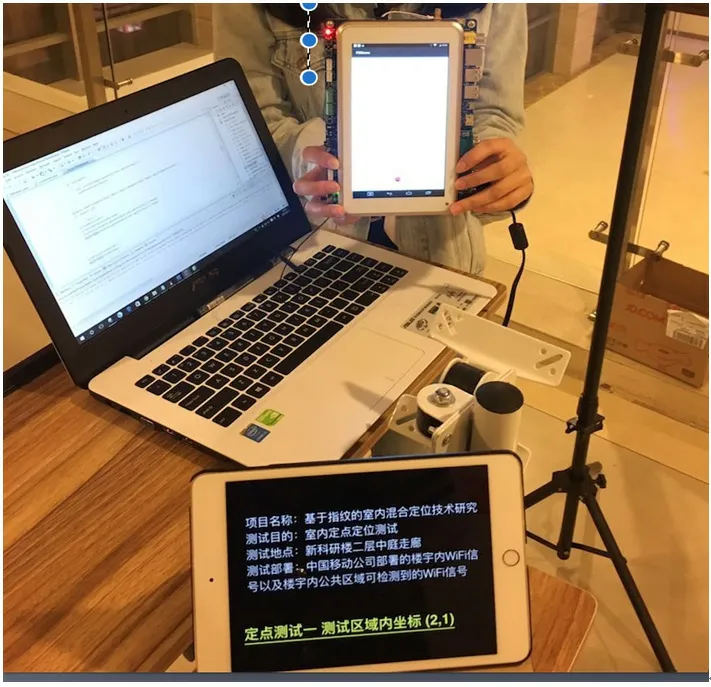
图5 现场实时定点定位测试
定位结果如图6所示。本文的测试进行了400次定点测量。图6展示的是定位误差的概率质量函数(Probability Mass Function,PMF)。从定位结果可以看出,平均定位误差约2 m,95%的定位误差在4 m以内。因此指纹定位方法能够满足绝大部分室内定位应用的需求。
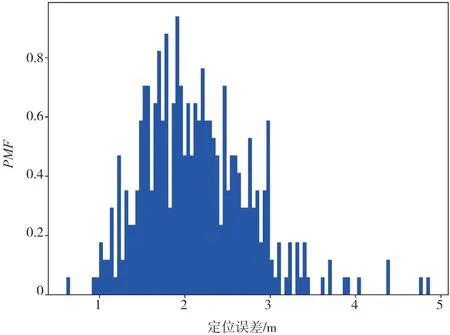
图6 定位结果
2 非均匀栅格的指纹定位方法
已有的室内多模指纹定位算法都是基于在室内环境下多模信号的覆盖是均匀的假设前提,即在每个室内定位栅格里都能采集到相同维度的多模信号。因此,这些方法均是将待定位区域进行均匀栅格划分。而均匀栅格划分实际上是平面区域的均匀量化(将整个栅格区域内任一点的坐标等效为栅格中心点的坐标)。然而,在实际室内环境下,不同制式的信号覆盖是非均匀的。在实际的多模信号非均匀覆盖的情况下,均匀量化定位区域的方法会面临难以确定栅格划分粒度的困境。如果按照较粗的粒度进行栅格划分(如5 m×5 m),会导致栅格内有非蜂窝信号的覆盖空洞;如果按照较细的粒度进行栅格划分(如1 m×1 m),会导致定位指纹的采集量突增,使得室内定位系统部署复杂费时,运营维护成本较高。
本文提出一种非均匀定位栅格划分方法,通过初始栅格划分、栅格分裂以及栅格合并,实现待定位区域的非均匀量化。所述定位区域非均匀量化指在多模信号密集的区域,采用粒度较小的栅格划分该区域,而在多模信号稀疏的区域,采用粒度较大的栅格划分该区域。具体步骤如下。
步骤1,初始栅格划分。以5 m×5 m为粒度划分待定位区域,得到初始栅格,并以栅格的几何中心作为该栅格的定位参考点。
步骤2,初始栅格分裂,如图7所示。以初始栅格为单位,判断该初始栅格范围内是否有非蜂窝接入点(Access Point,AP)覆盖。非蜂窝AP指无线保真(Wireless Fidelity,WiFi)AP。如果有非蜂窝AP覆盖,则将5 m×5 m栅格进一步划分为25个1 m×1 m二级栅格,并以1 m×1 m栅格的几何中心作为二级栅格的定位参考点。如果没有非蜂窝AP覆盖,则保持原有初始栅格不变。
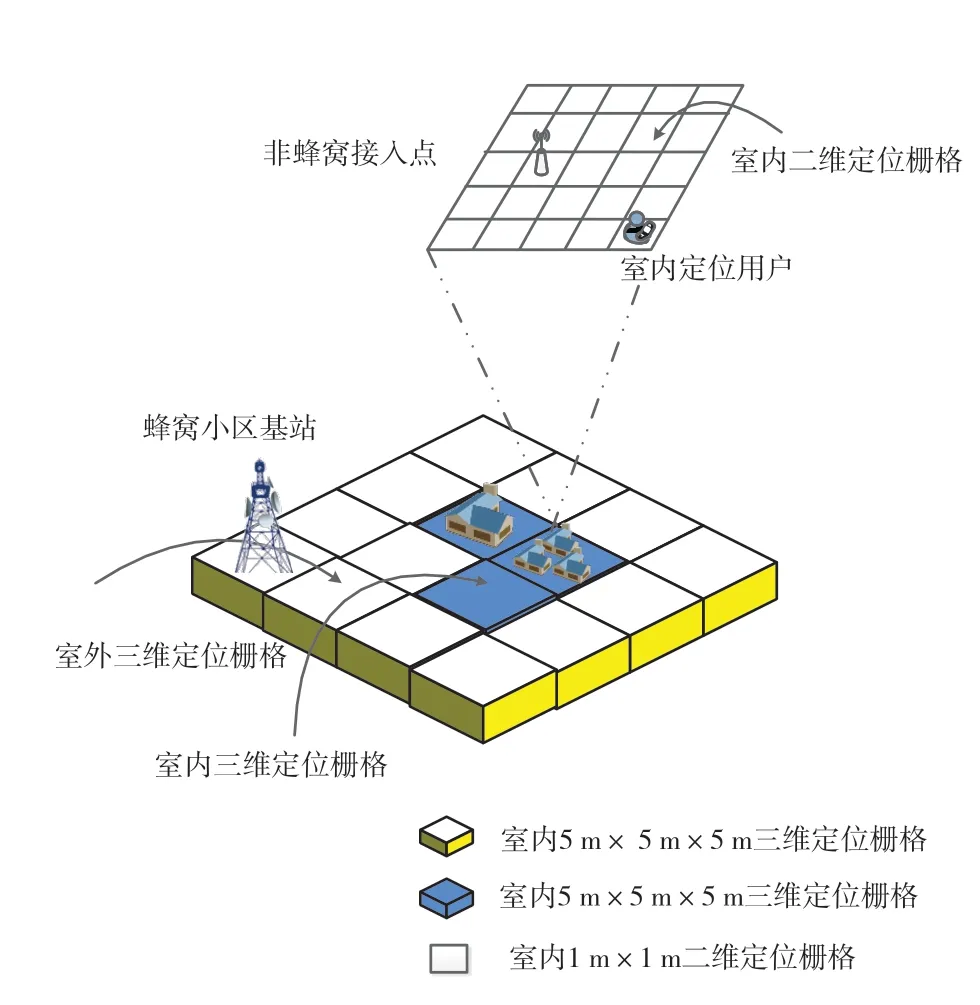
图7 非匀质均匀定位栅格示意图
步骤3,二级栅格合并。对于一个初始栅格内没有非蜂窝AP覆盖的二级栅格,将这些二级栅格合并为一个二级栅格,并以其形心作为该二级栅格的定位参考点。
步骤4,以二级栅格为单位,基于高精度地图,利用射线传播模型计算栅格中定位参考点处的多模信号强度。多模信号强度包括定位参考点处接收到的蜂窝基站的参考信号接收功率(Reference Signal Received Power,RSRP)以及定位参考点处接收到的非蜂窝AP的接收信号强度指示(Received Signal Strength Indication,RSSI)。
步骤5,将定位参考点处的多模信号强度作为该栅格的特征指纹向量所有栅格的特征指纹向量组成定位指纹数据库。其中,特征指纹向量包 括2G基 站的信号强度RSRP2G,3G基站的信号强度RSRP3G,4G基站的信号强度RSRP4G以及WiFi AP的信号强度RSSIWiFi。
3 结 语
本文首先分析了室内定位技术在物联网时代的需求与发展前景,从成本、部署难易程度、后期推广方面综合分析,提出基于位置指纹的室内定位方法。其次,设计并实际搭建了室内指纹定位系统,通过现场实测数据表明,指纹定位系统能够获得比较精准的定位结果。最后提出了一种基于平面区域非均匀量化的定位栅格划分方法,能够在室内定位的定位精度和运维成本方面取得平衡。
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
中成药(2022年1期)2022-01-27
科技创新与应用(2021年31期)2021-11-09
金属加工(冷加工)(2020年11期)2020-11-24
测控技术(2018年5期)2018-12-09
精密制造与自动化(2018年1期)2018-04-12
现代测绘(2018年1期)2018-03-06
测绘通报(2016年9期)2016-12-15
设备管理与维修(2016年5期)2016-03-16
弹箭与制导学报(2015年1期)2015-03-11