基于ADS-B引导的飞机起降视频跟踪系统设计
2021-02-14 06:25辛林杰
电视技术 2021年12期
叶 艳,刘 菲,辛林杰
(中国电子科技集团公司第三研究所,北京 100015)
1 概 述
广播式自动相关监视(Automatic Dependent Surveillance-Broadcast,ADS-B)是一种新型的空域飞机监视方式,一般由发射机和接收机组成。发射机安装于飞机上,使用机载导航系统得到飞机的精确位置和速度信息[1],周期性地向外广播飞机的国际民用航空组织(International Civil Aviation Organization,ICAO)地址码、经度纬度、高度、速度、航向等飞行动态信息。ADS-B地面接收站通过空地数据链路接收发射机的广播信息,能实现地空监视。其他飞机通过空空数据链路能接收ADS-B广播信息,实现飞机间的空空监视。ADB-S监视具有投资成本低、监视范围广、监视精度高以及能够实现飞机间的空空监视的优势[1],可以实现地对空、空对空以及机场场面的一体化监视,ADS-B最大的特点就是采用广播式通信方式[2]。
本文设计的基于ADS-B引导的飞机起降跟踪系统能够以低成本的方式实现昼夜间起飞和降落高清视频监视以及辅助着陆引导。系统通过ADS-B接收机给出机场空域的飞机态势,可手动或自动引导光电跟踪系统对飞机目标进行捕获、跟踪以及起落架状态识别。结合ADS-B接收机给出的经纬度信息以及跟踪系统给出的方位俯仰信息,能在视频图像上绘制飞机降落的下滑线。通过与标准下滑线比较以及飞机起落架状态识别,给出预警信息,保障飞机起降过程安全。
2 系统组成
系统主要由ADS-B接收机、光电指向器、驱动控制单元及显控终端等组成。光电指向器含高清可见光摄像机、长焦制冷红外热像仪、伺服稳定平台,能够实现对飞机起降的昼夜图像获取;驱动控制单元含视频跟踪器、综合控制器、视频编码器及数据接口单元,主要实现目标自动检测,输出目标相对于视场中心的偏差量,驱动伺服单元完成闭环跟踪。显控终端实现对图像的实时显示以及对光电指向器的操控[3]。系统组成如图1所示。

图1 系统组成框图
3 工作原理
视频跟踪系统由于视场角比较小,无法兼顾整个机场范围空域的飞机状态。将ADS-B系统与视频跟踪系统融合,利用ADS-B空域的监控能力以及视频跟踪系统直观的视频图像,能够很好地对飞机起降段实现自动视频跟踪。ADS-B引导视频跟踪的原理如图2所示,ADS-B地面站接收飞机广播的各种信息,将飞机的位置、速度等信息实时发送给起降跟踪监视系统,起降跟踪监视系统接收引导,调转发现目标后自动捕获目标并进行持续跟踪,直至飞机远离机场或者停止滑行。
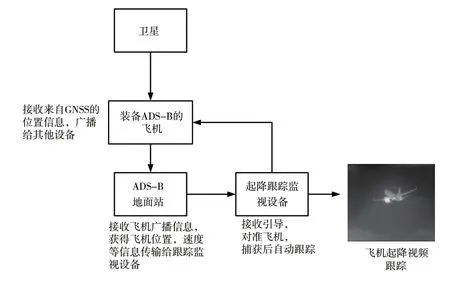
图2 ADS-B引导视频跟踪工作原理图
基于ADS-B引导的视频跟踪系统一般在在机场部署一套ADS-B地面接收站,部署两套视频跟踪设备分别兼顾起飞和下降段跟踪监视。在中小型机场,跑道利用不特别频繁时,结合ADS-B引导数据,可以在塔台顶部安装1台视频跟踪监视系统,满足起飞和降落段飞机跟踪的要求。视频跟踪系统有两种工作方式:一是预置位自动捕获飞机,自动跟踪目标至飞机上升到安全高度或下降到跑道滑行结束后释放回到预置位等待;二是接收ADS-B引导数据捕获飞机,视频跟踪分系统对准起飞或下降飞机,自动捕获跟踪飞机直至起飞或下降段结束。
4 主要功能及主要技术指标
基于ADS-B引导的视频跟踪系统具有图形化的航空活动监视能力,具有航迹显示功能、全天时目标高清视频显示功能、视频跟踪数据与ADS-B数据融合功能、起落架状态报警功能、实时视频的录像、截图、回放功能以及系统故障检测反馈功能[4]。ADS-B接收机的主要技术指标如表1所示。

表1 ADS-B接收机的主要技术指标
视频跟踪系统的技术指标主要有3个。
(1)昼间跟踪距离。在大气能见度≥23.5 km的情况下,对空中目标尺寸不小于28 m×11 m(翼展×高度)航空器的搜索发现距离不小于25 km,跟踪距离不小于20 km;
(2)夜间跟踪距离。在天气晴朗的情况下,对空中目标尺寸不小于28 m×11 m(翼展×高度)航空器的搜索距离不小于20 km,发现跟踪距离不小于15 km。
(3)跟踪精度为0.5 mrad。
5 基于ADS-B引导的视频跟踪关键技术
基于ADS-B引导的关键技术主要有两个,一是要能够将目标引导到视频图像视场中,二是将目标引导到视场中间后视频跟踪系统要能够迅速对目标进行捕获进而稳定跟踪。将目标引导到视场中间的关键点在于视频跟踪系统与ADS-B系统在时间及空间上要能够统一,时空统一之后,经过误差校正,一般情况下能够将目标引导到视场中。
飞机目标具有相对速度高的特点,对飞机目标的捕获及稳定跟踪包含两个方面,一是视频跟踪器能够对复杂场景下的实时视频中的目标快速检测出来;二是伺服系统能够对跟踪器输出的目标偏差快速响应,使目标处于视场中心。可采用边缘跟踪方式结合基于前馈的大跟踪角速率控制技术满足对复杂背景下高速目标的稳定跟踪要求。
5.1 时间及空间统一
5.1.1 空间统一
通过分析ADS-B接收数据可知,ADS-B探测到的目标位置是以空间坐标系经纬高输出的,而视频跟踪系统一般使用以转台为原点的极坐标系。为正确接收ADS-B引导,首先需要有高精度差分GPS获得视频跟踪系统安装位置经纬高坐标。接收到ADS-B发出的目标经纬高数据之后,需要目标将经纬高转换为转台的方位、俯仰以及距离数据,完成视频跟踪系统调转以及焦距、聚焦设定。可用直角坐标系法完成经纬高坐标到方位、俯仰以及距离的计算。
已知目标点的经纬度为Jm、Wm、Hm,地球半径为R,利用式(1)将经纬高坐标转换为目标直角坐标(Xm,Ym,Zm)。光电设备经纬度坐标为Jb,Wb,Hb,利用式(2)将经纬高坐标转换为光电设备在直角坐标系下的坐标(Xb,Yb,Zb)。
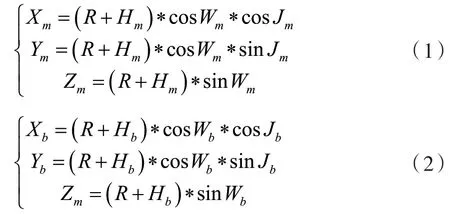
求出目标与光电设备在直角坐标系下的数据差:Δx=Xm-Xb,Δy=Ym-Yb,Δz=Zm-Zb.利用式(3)可以求得目标相对于视频跟踪系统的方位、俯仰、距离(A、E、L)。

5.1.2 时间统一
一般航空器飞行速度较快,为使视频跟踪系统接收到目标引导数据调舷后能够发现目标,需将视频跟踪系统与ADS-B发出数据进行时间对准。ADS-B发出的信息中一般含时间戳,即输出报文包含精确的UTC时间信息,精度≤0.1 μs,数据频率一般为2 Hz。视频跟踪系统可接收差分GPS时间,将系统数据时间统一为GPS时间。通过解析ADS-B报文数据中的时间戳信息,将视频跟踪系统与ADS-B接收器进行时间对准。ADS-B数据传输延时为2 ms,视频跟踪系统时间周期为20 ms,所以将视频跟踪系统与ADS-B时间统一后,可正确接受引导,及时发现目标。
5.2 机场起降视频跟踪关键技术
5.2.1 高速目标稳定跟踪技术
对于高速运动目标,传统的PID控制器存在严重的跟踪滞后,无法满足使用要求。本系统通过ADS-B解算飞机运动轨迹,得到飞机相对转台的速度及加速度等信息,将其引入伺服系统跟踪控制环路,通过前馈补偿,实现转台瞄准线对飞机的高精度跟踪[3-4]。伺服控制系统框图如图3所示。

图3 伺服控制系统框图
根据自动控制原理,令系统跟踪动态轨迹时,系统动态误差可表示为:


式中:KP,Kv,Ka是位置、速度、加速度误差系数的另一种表示形式,即品质因数。式(5)表明,跟踪误差包含了参考信号(本系统为飞机运动轨迹)的位置、速度、加速度及更高阶导数信息。
传统的PID控制器可使KP=∞,对于静止目标可以消除跟踪误差,但对于飞机这种高速运动目标,由于存在速度及加速度误差累积,导致跟踪误差较大。为了解决这个问题,本系统采用前馈控制将飞机运动信息加入到控制器,对速度和加速度误差进行补偿,实现对飞机运动轨迹的高精度跟踪。前馈控制系统结构如图4所示。
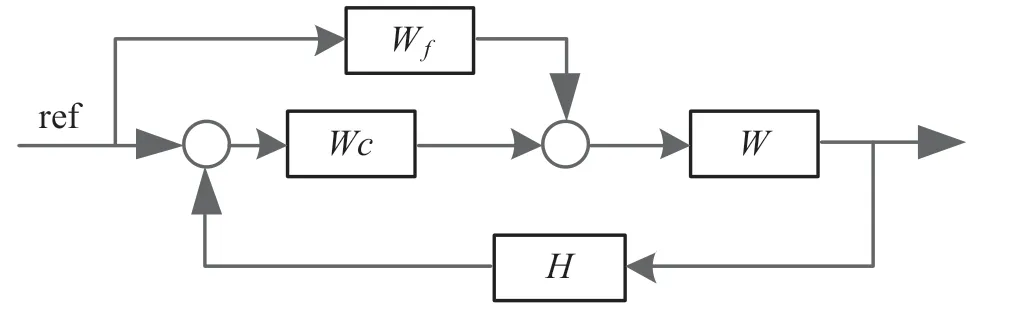
图4 前馈控制系统简图
当前馈控制器表达式如下时,满足系统不变性条件,即输出可高精度跟踪输入信号。

式中:s代表微分,即前馈控制器是利用了输入参考信号的各阶导数信息。在本系统中,通过ADS-B给出的飞机运动信息进行前馈补偿,有效提高了跟踪精度。
5.2.2 归一化互相关跟踪算法及模板更新策略
5.2.2.1 归一化互相关跟踪算法
在视频追踪飞机起降过程中[5],目标移动速度非常快,在跟踪过程中目标变化大、高速运动且背景复杂。因此,采用归一化互相关的相关跟踪算法,在满足系统实时性要求的前提下,尽量提高跟踪精度。
归一化互相关匹配算法一般写为NCC算法,通过计算模板图像和待匹配图像的互相关值来确定匹配程度,其定义如下:
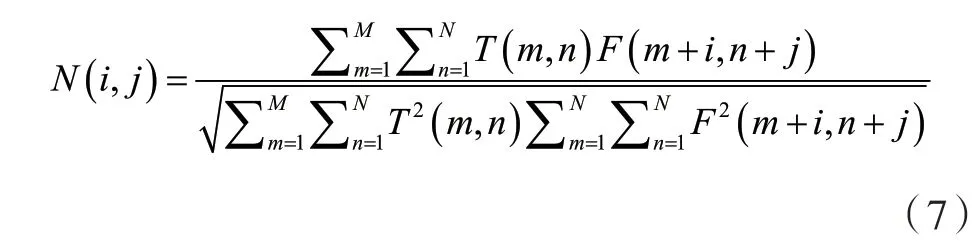
式中:T(m,n)为模板图像,F(m+i,n+j)为实时图像,(i,j)为实时图像左上角像素点在实时图像中的坐标。相关系数满足0≤N(i,j)≤1,取最大值1时最相似,相关系数的最大值NMAX(i,j)的(i,j)为跟踪目标位置坐标,即最佳匹配位置。
NCC算法适用于复杂背景,且不受光照变化影响,缺点是图像中自相关值都比较大,计算出的互相关系数会出现以真实位置为中心的平缓的峰,容易出现无法检测到准确尖峰位置的情况。因此,在匹配前需先对待匹配图像进行边缘处理,将相关性集中在轮廓信息的相关性上,提高目标位置定位的精度。
5.2.2.2 基于比例加权系数的模板更新策略
从相关算法可知,模板的选取决定整个跟踪过程中跟踪性能的好坏。在跟踪过程中,目标形态不可避免地发生着变化,对模板的合理更新是相关跟踪的关键。因此,选择合适的模板更新策略,可以在一定程度上克服噪声、形变等的影响。
模板更新策略包括模板更新条件和模板更新方式两部分。模板更新条件是指模板在何种条件下更新,当相关系数NMAX值较大,说明图像相似度比较高,模板频繁更新会产生累计误差,引起跟踪漂移,此时不需要更新模板;当某一帧图像跟踪质量较差,相关系数值小时,说明图像相似度比较低,此时更新模板会引入较大的误差,导致跟踪失败。因此,根据实验获得的经验值,选择0.5≤NMAX≤0.95作为模板更新条件,模板更新条件确定方法如下:

模板更新方式为:将初始模板与当前最匹配位置图像按一定比例加权更新得到新模板,比例值由相关系数确定。可以表示为:

式中:Mnew(x,y)表示新模板,Mold(x,y)表示当前使用的旧模板,Mcurr(x,y)是当前图像中的最佳匹配位置的图像,α表示由相关系数确定的加权值,取值范围在(0,1)。实验证明,采用这种目标模板更新策略,可以有效抑制跟踪误差的累积以及跟踪漂移。红外跟踪飞机图片如图5所示。

图5 红外跟踪飞机图片
6 结 语
本文描述了ADS-B数据引导飞机起降视频跟踪系统的组成、工作原理、关键技术指标以及此类系统的关键技术,详细叙述通过前馈补偿实现转台瞄准线对飞机的高精度跟踪以及归一化互相关跟踪算法和基于加权的模板匹配方法。经过国内某机场实际使用,采用该相关技术能够实现对飞机起降全过程的稳定跟踪,能够实现飞机起降跟踪监视功能以及辅助着陆引导功能。
猜你喜欢
建材发展导向(2022年23期)2022-12-22
建材发展导向(2022年12期)2022-08-19
环球时报(2022-05-30)2022-05-30
哈尔滨轴承(2020年2期)2020-11-06
今日中国·法文版(2020年7期)2020-07-04
当代陕西(2019年11期)2019-06-24
中国特种设备安全(2019年1期)2019-03-13
作文周刊·小学一年级版(2017年9期)2017-06-20
小学生导刊(低年级)(2016年8期)2016-09-24
山东青年(2016年2期)2016-02-28