基于PreScan 的自动泊车仿真研究*
2021-02-25 06:27朱鹏飞丁文政田昱鑫
计算机与数字工程 2021年1期
朱鹏飞 梁 威 丁文政 田昱鑫
(上海工程技术大学机械与汽车工程学院 上海 201620)
1 引言
随着科技的不断进步,汽车工业得到了迅猛的发展,车辆日益增多,人们出行越来越方便的同时,停车问题也越来越明显,尤其是在一些大型的商场超市和景区旁边。为了能有限的空间内划分出更多的车位,每个车位的空间越来越窄小。对于驾驶员来说,特别是在一些未知障碍下泊车入位成为一个不小的挑战[1]。为了降低驾车者倒车入位操作的难度,自动泊车系统得到了广泛的研究[2~3]。
通常,停车场是在过道两侧横向、纵向和斜向安排车位,相应地就有所谓“平行泊车”、“垂直泊车”和“斜向泊车”三种泊车方式(图1)。本文所提出的,主要解决图1 中(a)、(b)两种环境下的车位检测问题,采用多传感器融合的方法,可以分别获得各种类别的信息,这些信息通过控制中心进行数据融合、综合判断,更加准确地感知停车场周围的环境,做出准确的路径规划。
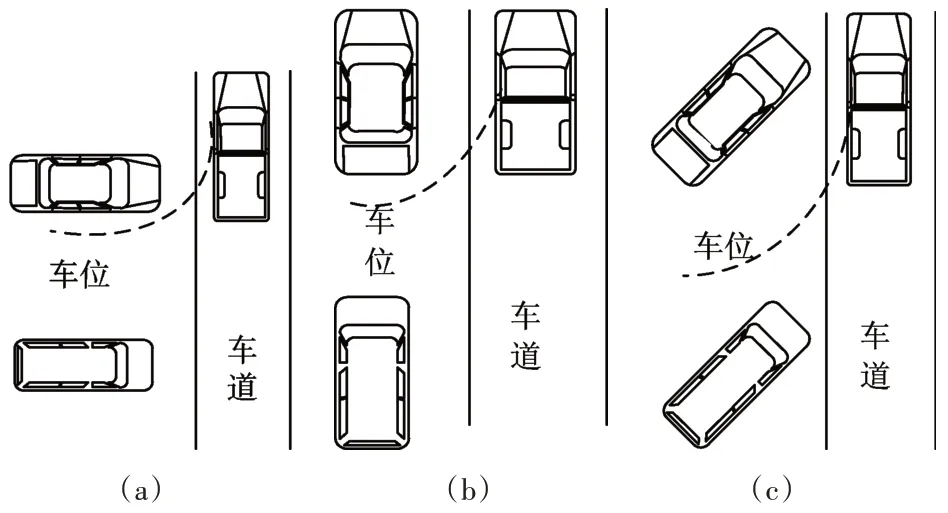
图1 泊车方式
2 问题描述
2.1 自动泊车的数学模型
典型的自动泊车系统通常与其他系统,例如:自适应巡航控制,预先紧急制动系统等,以及导航数据一起使用,可以提高驾驶员的舒适度和安全性[4~6]。本文所选用的汽车泊车模型如图2所示,在参考系,(x,y,θ)为车辆模型后轴中点A的坐标,θ为车型与x轴的夹角,∅为车型前轮转向角,L为车型车身长,L1为车头和车位到轴的距离,μ为车型的运动速度。
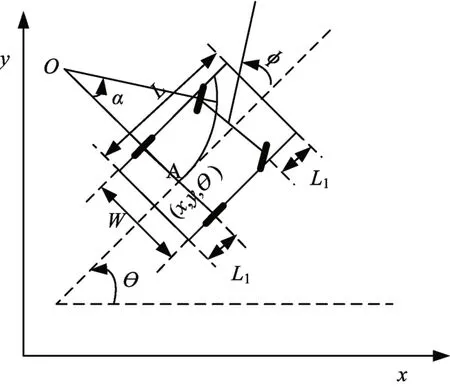
图2 车辆坐标系
其数学模型为
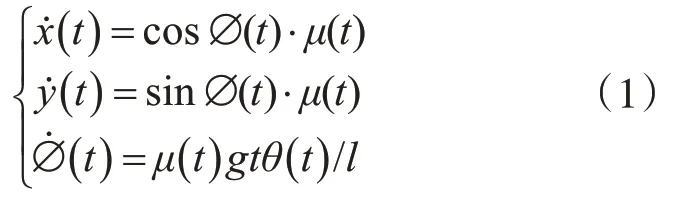
在泊车研究中,控制的是目标车辆的线速度和车体的角速度,对该模型进行简化,令μ(t)tgθ(t)/l=ν(t),得到:

u,v分别为目标车辆的线速度和角速度[10]。
2.2 目标车辆动力学约束
通过对车辆数学模型的分析,得到车辆的动力学约束。假设目标车辆是一个矩形刚体[11],其瞬时转向中心O,在平面运动过程中,车辆后轮在垂直方向上速度分量为0,由此性质可得约束方程[7]:

另一个约束就是转向装置的角度约束,αmin<α<αmax,即目标车辆后轮中轴的速度要大于等于角速度和最小转弯半径ρmin的乘积,得第二个约束方程:

由方程(3)、(4)可得目标车辆动力学约束方程,如下:

2.3 自动泊车系统路径规划
路径规划指的是,中央处理器根据汽车与目标停车位的相对位置信息,对后续泊车过程的运动路线进行分析,规划计算出最佳的泊车路径。国内外关于泊车路径的研究较多,常见的泊车路径可分为平行式、垂直式和倾斜式。
图3 为平行泊车路径规划示意图,目标停车位前后方已停有车辆,其中L1和L2分别为车位的长度和宽度,D 为车身纵向中轴线到X 轴的距离,平行泊车路径可简化描述为PP1直线、P1P2圆弧和P2P3圆弧。图中对圆弧和直线相接处做了圆化处理,缓解泊车入库时转向轮突变的问题[8~10]。
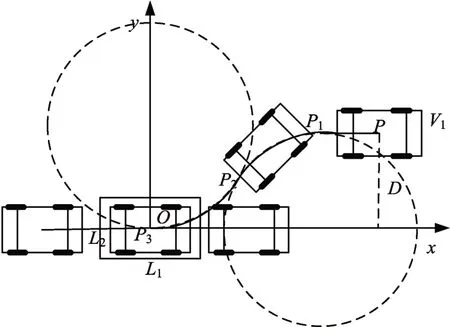
图3 平行式泊车路径规划
图4 为垂直泊车路径规划示意图,在垂直泊车过程中需要完成车身方向角90°的改变,并需要注意左右两侧的停车间隙,方便乘客上下车[11~12]。具体泊车路径需要完成向前后向的三步行驶,主要包括:直行向后行驶,即直线PP1;右打向后行驶,即弧线P1P2;直行倒车,即线段P2P3。
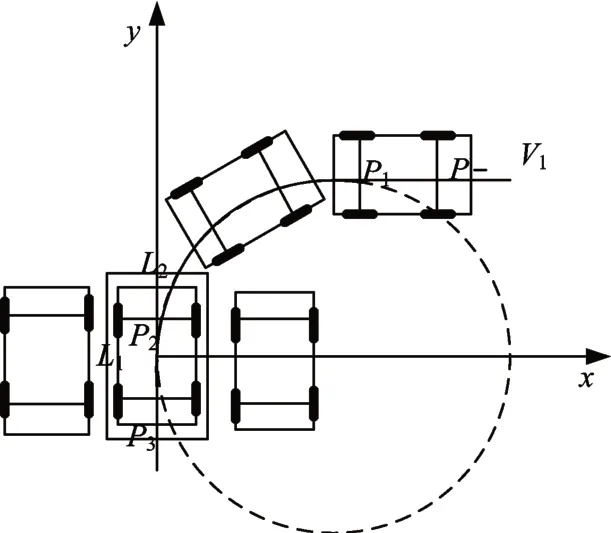
图4 垂直式泊车路径规划
3 PreScan中建模和仿真分析
3.1 场景的选择与建立
PreScan 是一个集场景仿真与控制模型为一体的软件,因此,它可以很方便地用于再现现实采集到的工况,并且利用其丰富的传感器模型以及与Simulink的融合,进行控制系统的开发[13~15]。
本文旨在研究一种基于PreScan的汽车自动泊车的快速建模方法。主要内容是首先选取基于多个车辆的停车场景并建模,根据汽车的泊车方式,进行四种典型的泊车仿真模拟测试[16]。最后将建立好的参数化模型与PreScan 相结合,对本文开发出的建模方法的可行性进行测试[17]。
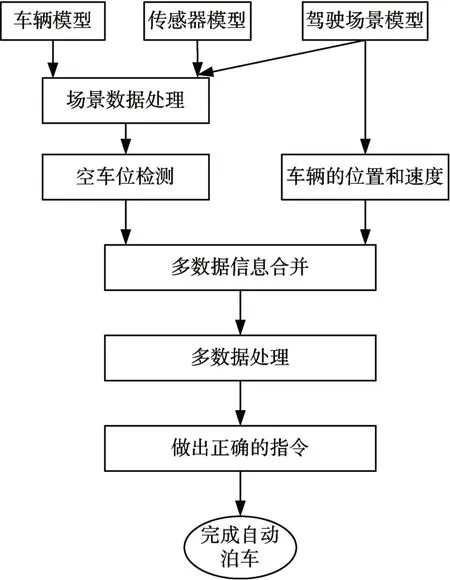
图5 自动泊车流程
自动泊车系统使用超声波传感器扫描环境并测量停放的车辆之间的自由空间。目标车辆配备三个超声波传感器和一个摄像机,其中有两个传感器位于车辆左前侧和右侧的用于搜索停车区域,位于车辆中间后侧的第三传感器用于防止与后方的车辆、人等发生碰撞。

表1 传感器的范围和视野
目标车辆遵循预定的轨迹,利用多传感器的信息融合,找到合适的泊车区域,提高驾驶员操作的安全性和舒适性,PreScan 建模的场景允许在道路的左侧和右侧进行垂直(a)和平行停车(b)(见图6)。
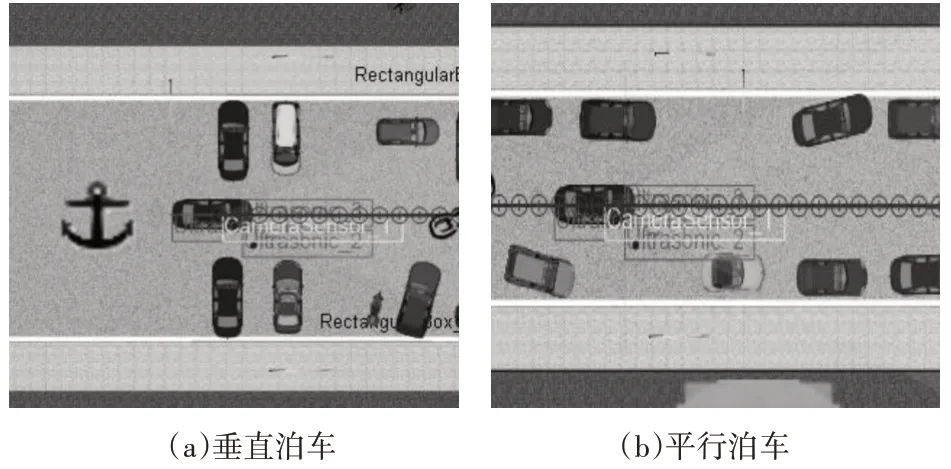
图6 场景建模
3.2 仿真结果分析
在自动泊车过程中一旦检测到停车空间等于或大于所需的最小空间,车辆就会刹车并完全停止,然后根据规划好的路径进行自动泊车。如图7~8 所示,用于检测目标车辆、行车轨迹、障碍物轮廓的泊车路线,其中图(a)是检测泊车区域路线图,图(b)是检测到泊车区域后完成自动泊车的路线图。
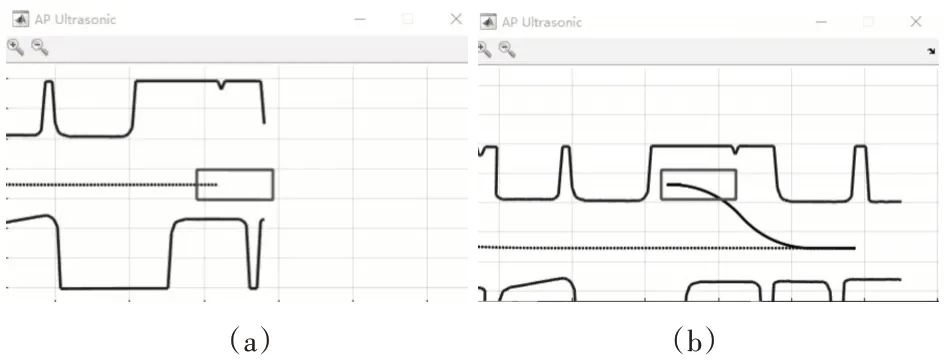
图7 平行泊车(左侧)行车轨迹

图8 垂直泊车(左侧)行车轨迹
由上图可以得到,目标车辆经过系统的控制能够完成垂直和平行泊车,结果如上图所示。但是由于目标车辆的边框是其边界框,而不是其真实的实际形状,导致在超声波图上会显示有虚假碰撞的存在图8(b),在实际运行的3D模型中并没有发生。
4 结语
本文通过PreScan软件建立泊车环境并设定好泊车路径和基本运动参数的情况下,通过联立Simulink 进行泊车轨迹仿真,验证了垂直泊车和平行泊车的可行性,设计的自动泊车控制系统不仅提高了泊车系统的智能性,还进一步优化了狭窄泊车位的利用率,增强了泊车的便利性。该仿真过程不但能够在传感器的选择和算法方面为自动泊车技术的研究提供参照,而且节省了成本降低了实际操作的危险性。但是由于泊车环境和自然天气的复杂性,单一的模板匹配并不能完全满足实际自动泊车系统的鲁棒性要求,以后的工作还要进一步完善对多变的泊车环境情况下车位检测算法准确性能的研究。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
中学生数理化·高一版(2022年4期)2022-05-09
新高考·高一数学(2022年3期)2022-04-28
汽车实用技术(2022年7期)2022-04-20
思维与智慧·上半月(2022年4期)2022-04-08
汽车画刊(2020年5期)2020-10-20
祝您健康·文摘版(2020年3期)2020-04-09
小猕猴智力画刊(2019年8期)2019-09-12
新高考·高一物理(2017年7期)2018-03-06
现代家长(2018年11期)2018-01-05