
面向未来交通的车辆“冲突-协商”机制的设计
2021-02-26 13:07
智能城市 2021年2期
(北方工业大学电气与控制工程学院交通设备与控制工程系,北京 100144)
1 研究背景及意义
随着现代城市交通的高速发展和机动车保有量的不断增长,每年道路上60%以上的交通事故由于交通冲突造成[1],数据表明交通冲突和交通事故存在密切的正相关关系。车辆在行驶至交叉口时由于司机避让不及时或自身因素而发生的行驶冲突,是影响交叉口的道路行车效率,扰乱城市交通秩序和危害车辆人员安全的主要原因。研究表明,由于司机疲劳驾驶造成的事故率可达总交通冲突的40%,该情况引起了国家相关部门及城市交通局的高度重视,严重危害车辆的行驶安全,因此,应用道路车辆辅助驾驶系统十分重要。
目前,我国为解决“交叉口冲突”的问题采取的主要措施是渠化交通、实行交通管制、修建立交等方法,前两种方法可以减少车辆间的相互干扰,但人力物力资源耗费巨大[2],修建立交可以将冲突车辆从通行空间上分开,但工程量大、消耗大量资金。由于驾驶每辆车的司机自身情况的轻重缓急有所不同,在不清楚对方车辆情况是否紧急的状态下贸然行驶会造成对双方车辆人员的伤害。
本文在面向当前及未来城市交通车辆行驶冲突严重的问题上,能够在即将发生冲突的车辆之间构成通信,减少城市交通事故发生率[3],提高城市交通的安全性。
2 系统的设计与关键技术
2.1 系统设计
2.1.1 系统结构
基于无线通信的“冲突-协商”机制主要由通信子系统、车载子系统两部分构成,本系统设定每个车辆按目的地等级划分行车级别即为其行车优先级。
(1)通信子系统由数据采集分析模块和信息收发模块组成。数据采集分析模块是接收同局域网车辆发送的车辆行驶优先级数据,并进行数据分析与比较;信息收发模块是实现通信子系统与服务端或者客户端之间进行信息传输的功能[4]。通信子系统以车载子系统中WiFi模块为载体实现整个“冲突-协商”机制功能。
(2)车载子系统以WiFi模块,超声波测距模块和红外线循迹模块为主。WiFi模块是为实现嵌入式系统的无线网络通信,由车辆串口和模块串口相连,实现车辆行驶优先级数据→网络→模块→模块串口→车辆串口及车辆串口→模块串口→模块→网络→车辆行驶优先级数据,双向的数据透传。超声波测距模块检测两车距离小于2 m时,开启WiFi模块的通信系统,车辆进行优先级的发送与接收[5]。
系统结构图如图1所示。
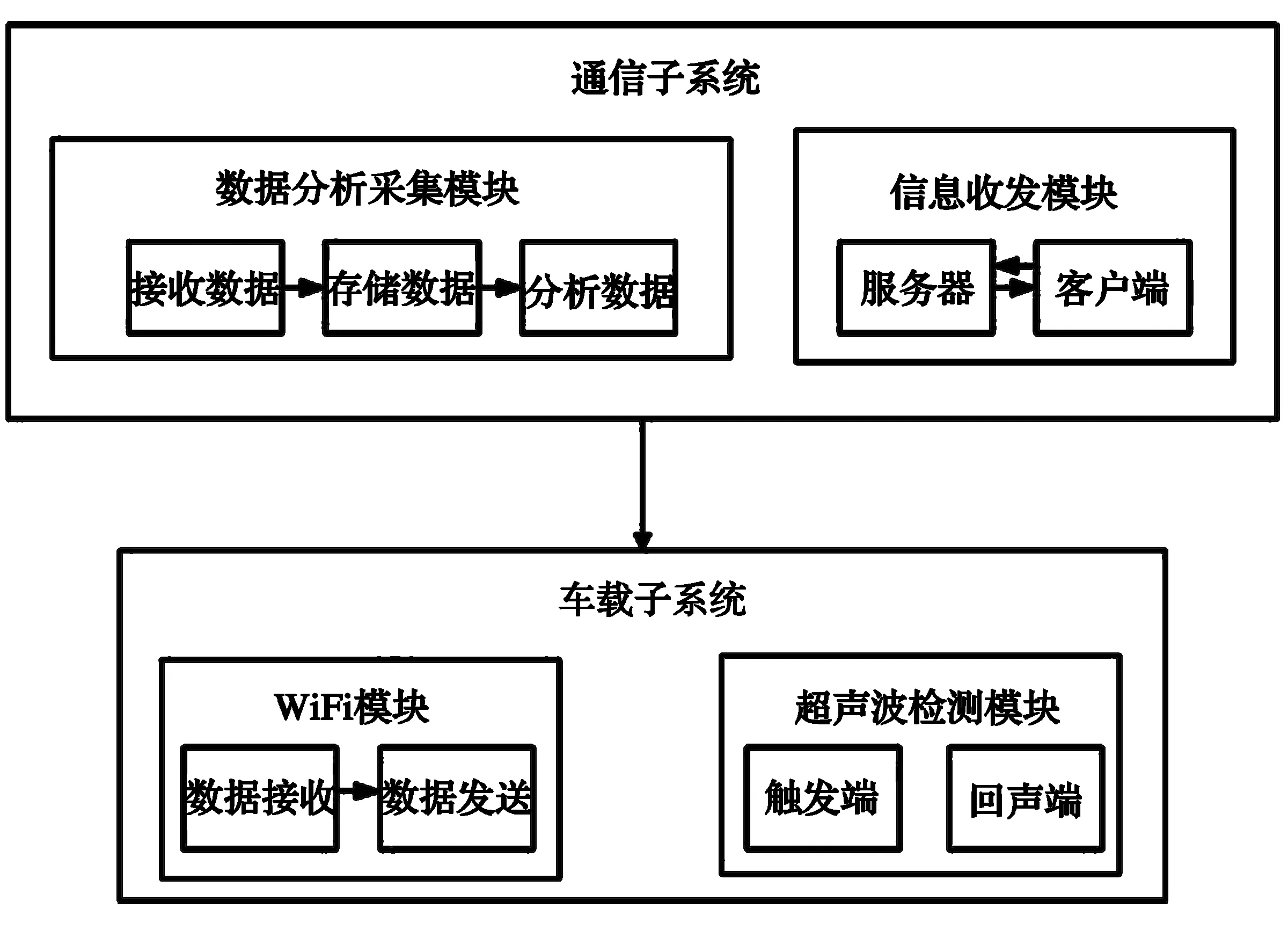
图1 系统结构图
2.1.2 工作流程
(1)客户端。
系统初始化后,小车开始向前行驶,超声波开始检测车间距离,如果车间距大于有效距离,两车继续前行;如果车间距小于有效距离,则本车发送优先级数据给邻车,且本车开始检测是否收到邻车行驶优先级数据,若没有接收到邻车行驶优先级数据,本车持续检测是否接收到邻车行驶优先级数据[6],若本车检测到邻车行驶优先级数据,则开始判断本车行驶优先级是否大于邻车,若本车行驶优先级大于邻车,本车继续前进,且进行新一轮循环;若本车行驶优先级不大于邻车,判断本车行驶优先级是否小于邻车,若小于邻车,本车停止前进待邻车前进后开始进行新一轮循环;若等于邻车行驶优先级,两车处于死锁状态,两车任意发送一个优先级信号后开始新一轮优先级比较循环。
(2)服务端。
系统初始化后,小车开始向前行驶,超声波开始检测车间距离,如果车间距大于有效距离,两车继续前行;如果车间距小于有效距离,本车检测是否收到邻车行驶优先级信号,若没有收到,本车持续检测是否接收到邻车行驶优先级信号,若本车检测到邻车行驶优先级信号,本车发送优先级信号给邻车,开始判断本车行驶优先级是否大于邻车,若大于邻车,则本车继续行驶且进行新一轮循环,若本车行驶优先级不大于邻车,则判断本车优先级是否小于邻车,若小于邻车,则本车停止,等待邻车行驶后再进入新一轮循环;若本车行驶优先级等于邻车,两车处于死锁状态,两车重新发送任意优先级信号后开始新一轮接收优先级信号循环[7]。
本系统包括车辆客户端和车辆服务端,客户端和服务端的工作流程分别如图2所示。

图2 客户端工作流程图
2.2 系统功能设计
本系统基于Arduino开发环境,面向所有交通情景,以减少车辆冲突,提高行车效率,保证行车安全。
(1)通信子系统。本系统实现数据的接收、分析、存储和发送,用于车辆行驶优先级在客户端和服务端之间的信息传递,实现车与车在冲突发生时,及时进行优先级比较。(2)车载子系统。车辆用超声波测量距离少于2 m时,为避免冲突,开启WiFi通信模块,接收到邻车行驶优先级的车辆,进行优先级的比较,以判断本车是否继续前进。当两个车行驶优先级相同时,随机给本车发送优先级,再次开启WiFi通信模块,进行新一轮的优先级比较,直到两车行驶优先级不同,可以判断车辆行驶为止。
服务端工作如图3所示。

图3 服务端工作流程图
2.3 系统主要方法与关键技术
2.3.1 串口转WiFi通信模式
工作原理图如图4所示。

图4 串口转WiFi模块工作原理
本通信模式是串口服务模块和多功能WiFi模块相结合的通信方式,可以实现全透明双向数据传输,支持透明协议数据传输模式。本通信模式基于UDP通信协议,是一种无连接通信,数据传输的过程延迟小,数据的传输效率高,可保证车辆道路的行车安全。工作模式为AP+STA模式:AP模式即无线接入点;STA模式即无线站点是一个无线网络的终端。在数据发送时,用户设备通过串口发送车辆行驶优先级给WiFi模块,再通过无线网络将数据传给服务端;在数据接收时,WiFi模块通过无线网络接收服务器传输的优先级,将数据通过串口传输给用户,进行优先级的比较。
2.3.2 “冲突-协商”机制
车辆行驶示意图如图5所示,协商过程如图6所示。

图5 车辆行驶示意图

图6 车辆协商过程示意图
“冲突-协商”机制作为辅助驾驶系统[8]的重要组成部分,可应用于无人驾驶,用于解决两辆车处于冲突状态时,可非人为的智能操作车辆停驶,以避免冲突。在本系统包括超声波测距模块、WiFi模块、单片机处理模块和车辆行驶状态显示模块。该机制设定每辆车都有单独的车辆行驶优先级,建立了一个以距离(distance)和优先级(priority)为输入量,以行驶状态显示模块为输出量的模型系统。通过距离变化和优先级大小的比较制定了行驶状态显示的规则,
将距离区间分为两级,distance≤有效距离时,为close(近);distance>有效距离时,为far(远);优先级分为三级,分别为low(priority=1);average(priority=2);high(priority=3)。当两车之间距离为close等级时,两车会发出各自提前根据自身轻重缓急情况确定的优先级,进行通信比较大小,达成其一优先行驶的目的,优先级高的车辆led灯亮绿灯继续前行;当两车优先级相同时,车辆均亮红灯停止行驶处于死锁状态,车辆会进行优先级的随机摇号进行优先级的比较,优先级大的一方亮绿灯优先行驶。
3 系统实现
3.1 硬件实现
在本系统中,硬件部分包括检测模块、WiFi模块、单片机处理模块和车辆行驶状态显示模块。检测模块主要包括超声波检测模块,主要采用的是HC-SR04超声波模块,通过超声波发射与接收的时间差计算出到障碍物的距离,探测对象为前方物体,探测距离为2~400 cm;单片机处理模块将检测模块检测到的数据进行接收、分析处理与发送;通过WiFi模块的完全集成串口转无线TCP/UDP传输功能进行与单片机处理模块间的数据发送;车辆行驶显示模块是分别用绿灯和红灯显示车辆下一步的行驶状态,绿灯表示继续前进,红灯表示停止行驶。
系统硬件组成示意图如图7所示。

图7 系统硬件组成示意图
3.2 软件实现
软件部分主要是使用Arduino软件的编译和上传功能,实现电脑程序下载到小车的单片机内。即将冲突的车辆在行驶小于一定距离时,可开启WiFi模块进行车辆行驶优先级的发送和接收,用户在比较优先级之后,车辆智能决定车辆行驶状态。
4 试验测试
由于场地条件的限制,本试验测试由两辆智能小车A和B完成。设置小车A的车辆行驶优先级为1,小车B的车辆行驶优先级为3,选择超声波检测器的有效距离为30 cm,使两辆小车使用红外线循迹功能沿在地面贴设的黑色轨迹呈直角行驶。当任一小车检测到前方30 cm内有即将通行的另一小车时,在面临冲突的小车间会相互发送各自的行驶优先级,小车A的led灯亮红灯并停止行驶,小车B的led灯亮绿灯优先行驶。
通过多次改变小车行驶优先级的试验验证,该系统能够有效实现通过无线网络比较优先级来达到车辆避让的目的,以有效解决车辆间的行驶冲突,保证行驶安全。
5 创新特色
本系统通过互联网实现车辆实时通信,进一步与未来无人驾驶技术相联系;创新应用“冲突-协商”机制模型,提高车辆通信效率,可有效实现车辆智能停驶;加入超声波测距系统,有效测量车辆的行驶距离,进一步提高系统准确率。本系统针对道路行车安全的问题,有效降低道路车辆的事故率并保障行车安全。
6 应用前景
因现阶段城市道路交通阻塞严重,车辆事故发生率日益增加,道路安全问题形势严峻,“冲突-协商”机制的应用刻不容缓。
本系统针对现阶段城市因人为注意力不集中或反应迟缓造成的行车冲突、紧急时刻车辆行驶延误大和道路通行能力低下的问题[9],进行了有效的改进,保证了行车安全,提高了道路的通行能力。本系统可应用于未来车联社交网络环境下多源交通信息交互平台,进一步优化未来车联社交网络的信息传输,使人们出行成为一种服务和享受,增加人们的使用幸福率,更大限度实现全社会的智能化。
猜你喜欢
科学技术与工程(2022年30期)2022-12-05
机械设计与制造(2022年5期)2022-05-19
汽车电器(2021年12期)2021-12-30
装备制造技术(2020年11期)2021-01-26
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
大众汽车(2018年11期)2018-12-26
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
通信电源技术(2016年4期)2016-04-04
