
牵引与主动导向控制的独立轮对转向架结构设计与动力学分析研究
2021-03-01 02:45陆正刚
机电工程技术 2021年1期
何 洋,陆正刚
(同济大学铁道与城市轨道交通研究院,上海 201804)
0 引言
随着机电一体化的发展与电机的更新换代,轮边(毂)电机被越来越多地应用到轨道交通车辆上。通过控制轮边(毂)电机转矩/转速(Driven Independently Rotating wheels,DIRW)使独立轮对转向架具有导向能力,已从理论与研究方面被证明。T.X.Mei等[1]使用永磁同步电机驱动独立轮对实现主动控制;Zheng-Gang Lu等[2]采用PID控制研究了电气耦合独立轮对车辆主动导向的稳定控制;Zheng-Gang Lu等[3]通过鲁棒控制解决了复杂车辆轨道非线性系统中控制系统鲁棒性差的问题。上述研究从仿真与试验方面证明了主动导向可以解决独立轮对导向能力缺失的问题。然而由于驱动电机用于主动导向的输出转矩限制以及轮轨之间黏着力饱和等因素,采用“牵引+主动导向”复合模式的车辆走行部需要有较小的一系悬挂纵向定位刚度。李军等[4]表明,一系悬挂纵向与横向刚度过大不利于车辆通过小半径曲线;杨哲等[5]中指出,为了能实现独立轮对转向架轨道车辆的主动导向,要求车辆具有较小的一系悬挂纵向定位刚度,而保持车辆牵引时的有效性则需要较高的一系悬挂纵向定位刚度;马卫华等[6]研究了一系悬挂刚度对列车动力学性能的影响;康宇[7]指出一系悬挂纵向定位刚度过低会影响转向架牵引力的传递,造成轮对相对构架偏移量较大、一系定位失准、牵引稳定性差,一系悬挂结构破坏等恶劣状态,对列车运行安全性造成危害。
本文基于上述研究,提出一种牵引与主动导向集成的独立轮对转向架结构方案,解决牵引与主动导向对车辆走行部一系悬挂纵向定位刚度需求的矛盾,使独立轮对转向架车辆可以通过主动导向算法解决由于独立轮对左右车轮解耦导致的丧失导向能力的问题,在曲线上可以有效降低轮轨磨耗,避免独立轮对在小半径曲线上轮缘导向;同时可以有效传递纵向牵引/制动力,有利于采用轮毂电机控制的独立轮对转向架轻轨车辆的发展前景。
1 独立轮对轻轨车辆曲线主动导向性能分析
独立轮对转向架具有左右轮对相对车轴解耦,车轴可做成下凹型轴桥形式以降低车辆地板高度等优点[5],但同时由于左右两侧车轮可独立旋转导致的轮轨纵向蠕滑力缺失会使车辆失去直线对中能力及曲线通过时导向能力[8]。前述研究已指出可通过控制电机直接驱动的独立旋转车轮的转矩或转速实现主动导向控制。
基于动力学软件SIMPACK与数值计算软件MAT⁃LAB/SIMULINK搭建传统独立轮对转向架车辆主动导向动力学及控制联合仿真模型,使用PID 控制算法[9]验证独立轮对轻轨车辆曲线主动导向性能。车辆以36.7 km/h速度通过200 m半径曲线时,对比主动导向控制与无控制时转向架前后轮对的横移与摇头角如图1所示。由图可知,主动控制在车辆通过200 m半径曲线时可有效降低轮对的横移与摇头,轮对从自由转动时的贴靠钢轨变为主动控制时处于轨道中心线附近位置,同时主动控制使轮对处于曲线径向位置,进而降低轮轨磨耗。
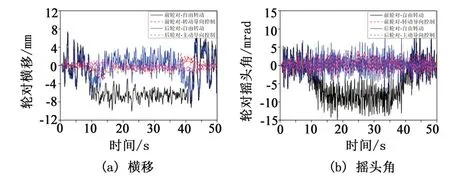
图1 传统独立轮对转向架通过200 m半径曲线时无控制与主动控制仿真结果对比
车辆以18.7 km/h 速度通过50 m 小半径曲线时,针对主动导向的独立轮对转向架,分别采用传统一系纵向定位刚度与弱一系纵向定位刚度,其前后轮对横移与摇头角结果对比如图2所示。传统独立轮对转向架一系悬挂纵向定位刚度较大,即使施加了主动导向控制,轮对由于无法克服较大的一系悬挂纵向定位刚度力导致前后轮对在小半径曲线上依旧贴靠钢轨,轮对的摇头角和横移量在曲线上较大,主动控制效果不明显。这是由于曲线半径较小时,轮对通过主动导向克服悬挂纵向力达到径向位置时所需转动的角度较大,进而所需克服的纵向悬挂力较大,在电机输出转矩受限制以及轮轨之间黏着力饱和的影响下轮对无法有效回到曲线径向位置。而降低转向架的一系悬挂纵向定位刚度后,如图中所示,轮对可通过主动导向回到径向位置,此时轮对的摇头角较小,且轮对回到轨道中心位置附近,避免了轮轨贴靠,进而降低轮轨间磨耗。

图2 传统独立轮对转向架通过50m半径曲线时,传统定位刚度与小一系纵向定位刚度仿真结果对比
上述仿真分析表明,传统独立轮对转向架在曲线半径较大时可通过主动导向使轮对在曲线上达到径向位置,降低轮对横移;而通过小半径曲线时则主动导向控制效果较差,但通过降低独立轮对转向架一系悬挂纵向定位刚度可使主动导向重新获得较好的控制效果。
2 基于主动导向控制的独立轮对转向架结构设计方案
2.1 转向架牵引与径向功能解耦
对于传统轮边(毂)电机直接驱动的独立轮对转向架列车,电机作为动力源驱动轮对转动,通过轮轨黏着产生轮周牵引力,该力通过一系悬挂定位装置传递到转向架,再通过牵引拉杆传递至车体牵引车辆前进,一系悬挂弹性元件的变形量取决于纵向定位刚度的大小。前章已验证对于传统独立轮对转向架而言,降低一系悬挂纵向定位刚度可显著改善小半径曲线主动导向性能,但降低一系悬挂纵向定位刚度同样会导致车辆牵引/制动时轮对相对构架偏移量过大,甚至引起车辆运行安全问题。为解决以上问题,可将一系悬挂牵引/制动力的传递与其径向功能进行解耦,保证在轮对相对构架纵向位置变化不大且能传递纵向力的同时,不影响轮对与构架的相对摇头能力,进而不影响轮对主动导向控制。
2.2 解耦结构设计方案研究
参考转向架中牵引拉杆的结构与功能[10],将拉杆结构设置于独立轮对轴桥与构架之间,使其承担轮对牵引力的传递,同时不影响轮对与构架间相对摇头。将此拉杆结构称为一系纵向拉杆,设计的单一系纵向拉杆与双一系纵向拉杆的独立轮对转向架方案如图3所示。
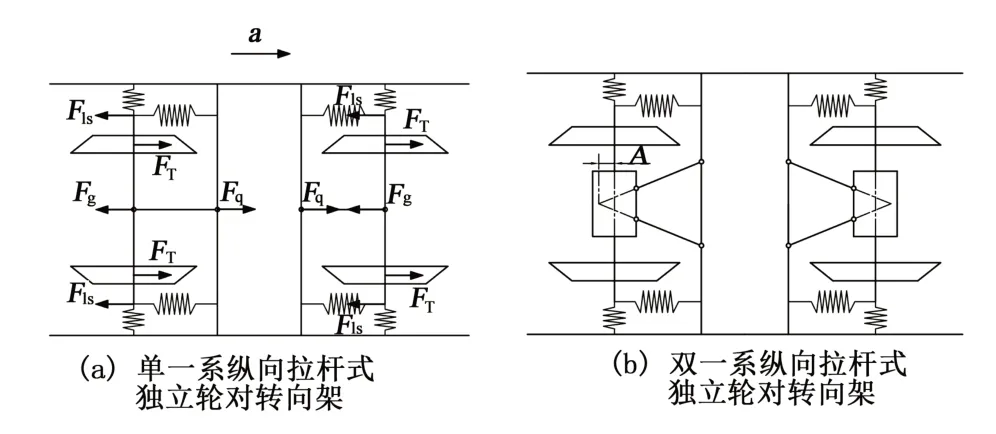
图3 独立轮对转向架牵引导向解耦方案结构示意图
对于单一系纵向拉杆转向架方案,如图3(a)所示,设当转向架前后车轮轮毂电机输出相等的牵引转矩TT驱动左右车轮转动时,所有车轮因轮轨黏着受到相等的轮周牵引力FT。对于半径为r0的车轮,有:

式中:Iwsy为轮对转动惯量;为轮对转动加速度。
针对独立轮对受力分析,其受到车轮的轮周牵引力FT,一系纵向拉杆作用于独立轮对的反作用力Fg以及来自一系悬挂的纵向力Fls,且以加速度a向前牵引,有:

式中:mw为独立轮对质量。
若将构架及其以上车体看做整体且以加速度a向前做加速运动,则对于构架与车体受一系纵向拉杆传递的纵向牵引力Fq,其大小与拉杆作用于独立轮对的力Fg相同,方向相反;同时还受到一系悬挂纵向力Fls,且对于4 轴低地板轻轨车辆,每节车厢安装两个转向架,有:

式中:mb为构架质量;mc为车体质量。
考虑转向架牵引时一系纵向拉杆刚度Kbar与一系悬挂弹性元件纵向刚度Ksx,则独立轮对与构架间相对位移Δx有:

此时一系悬挂弹性元件所受纵向力Fsx为:

由于一系纵向拉杆纵向刚度远大于一系悬挂弹性元件纵向刚度,故一系悬挂纵向受力极小,可近似认为牵引力由一系纵向拉杆传递。
除单一系纵向拉杆方案外,还可采用双一系纵向拉杆的形式,如图3(b)所示。双一系纵向拉杆与构架、独立轮对构成四连杆机构,且独立轮对侧铰接点之间间距较小,双一系纵向拉杆径向延长线交点与独立轮对中心距离设为A,当A=0 时,可近似认为在轮对小转动角度范围内,轮对相对构架仅发生摇头运动;同样的,该结构也可有效传递牵引力。
基于以上解耦方案,结合现有独立轮对转向架结构,设计出使用低纵向定位刚度一系轴箱悬挂与一系纵向拉杆的独立轮对转向架,其示意图如图4所示。
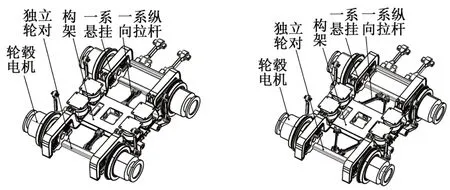
图4 采用单一系纵向拉杆与双一系纵向拉杆转向架总体结构
该转向架使用独立轮对,使轴桥高度可低于轮心高度以降低列车地板高度;一系悬挂采用纵向刚度较低的弹性元件。一系纵向拉杆连接构架与轴桥,使牵引与导向解耦,同时传递纵向牵引力。
3 采用低纵向定位刚度轴箱悬挂与一系纵向拉杆的独立轮对转向架牵引及导向性能分析
3.1 牵引性能分析
如图5 所示,基于动力学软件SIMPACK 建立采用低纵向定位刚度轴箱悬挂与一系纵向拉杆独立轮对转向架的四轴双转向架的车辆动力学模型,验证其纵向牵引/制动力传递情况。由于牵引力与制动力传递路径类似,此处仅对牵引力的传递进行验证。
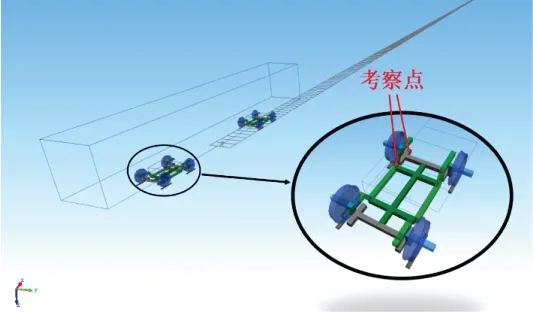
图5 基于SIMPACK的四轴双转向架车辆动力学模型
仿真得到电机驱动车辆在直线线路由3.6 km/h初速度以平均加速度1.2 m/s2加速运行17 s 至79.2 km/h时,独立轮对轴桥端部靠近车轮处相对构架的横向与纵向位移如图6所示。为验证同一轮对左右牵引电机输出转矩不同对转向架的影响,设置同一转向架的4个牵引电机输出转矩最大相差20%,且图中分别为传统独立轮对转向架与本文新设计独立轮对转向架仿真结果对比。由图可知,增加一系纵向拉杆后,车辆在牵引时较低的一系悬挂纵向定位刚度没有导致独立轮对与构架间产生过大的纵向与横向位移,且牵引电机输出转矩的不同没有导致独立轮对相对构架产生较大的振动。轮对与构架间的纵向牵引力由一系纵向拉杆有效传递,一系纵向拉杆受到的纵向牵引力如图7所示。由图可以看出,一系纵向拉杆传递的纵向牵引力约为传统转向架单侧一系悬挂传递的纵向牵引力的2倍,即与单个独立轮对两侧一系悬挂传递的纵向牵引力近似相同,可以认为本文新设计转向架其轮对与构架间的纵向牵引力由一系纵向拉杆有效传递。仅降低独立轮对转向架的一系纵向定位刚度可使转向架拥有更好的曲线通过性能与主动导向性能[5],但会导致一系轴箱悬挂无法有效传递纵向牵引/制动力。一系纵向拉杆可将独立轮对转向架牵引/制动与导向功能性解耦,使列车牵引/制动性能得到保障。
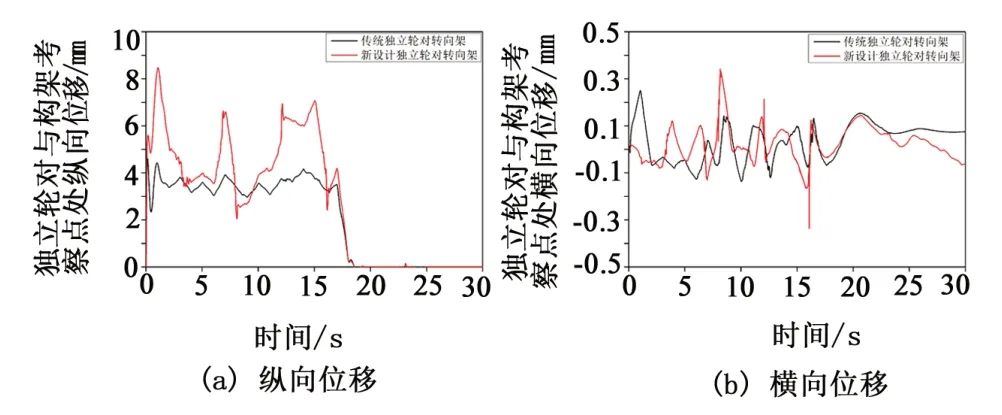
图6 转向架在左右车轮驱动电机牵引转矩不同时轮对相对构架纵向与横向位移

图7 新转向架一系纵向拉杆与传统转向架一系悬挂纵向受力情况
3.2 小半径曲线主动导向性能分析
基于SIMPACK 与MATLAB/SIMULINK 建立本文新设计转向架的车辆动力学及控制联合仿真分析模型,验证其在小半径曲线的主动导向性能。车辆以11.5 km/h 的速度通过25 m 小半径曲线时轮对的横移、摇头角、磨耗数以及电机控制转矩如图8 所示。由图可知,本文设计独立轮对转向架在小半径曲线通过时,相较于传统独立轮对转向架有更好的主动导向控制效果,转向架通过曲线时可避免轮对贴靠以及轮缘导向,同时轮对的摇头角被控制到接近于0,即可认为在小曲线上达到径向位置,且轮轨间磨耗数大幅度降低,有效改善了小曲线通过时轮轨间的磨耗关系。由图8(d)可知,在相近大小的控制转矩作用下,本文设计独立轮对转向架比传统独立轮对转向架控制效果大幅提升,且前轮作为导向轮其所需的控制转矩比后轮大。
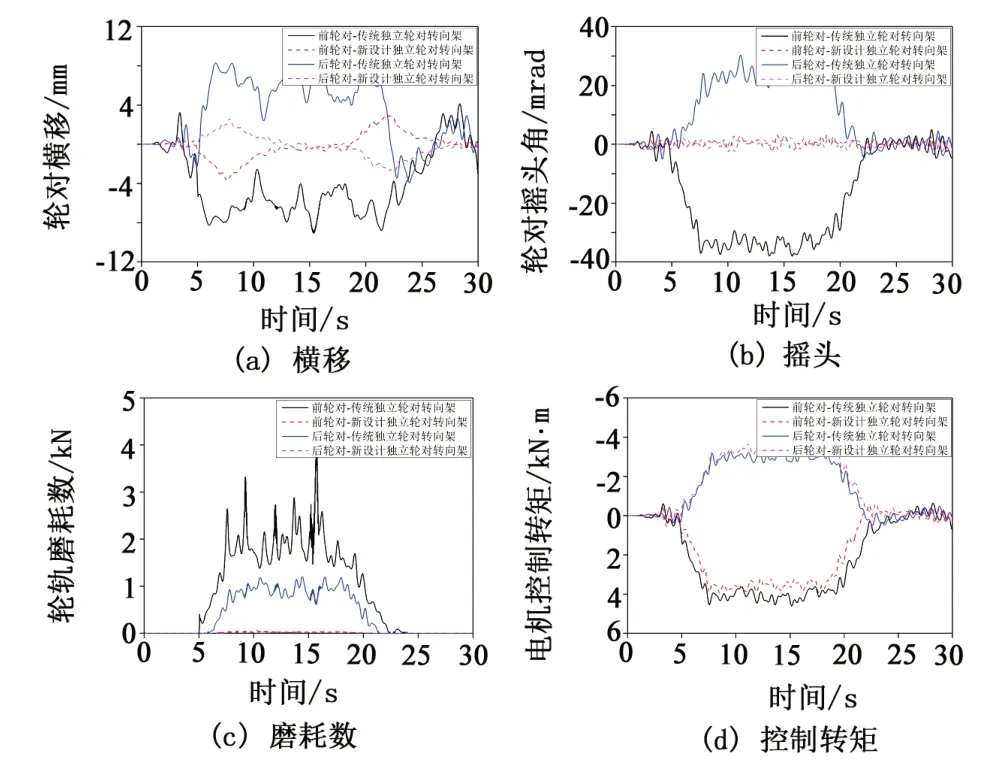
图8 本文设计独立轮对转向架与传统独立轮对转向架通过25 m半径曲线时主动导向控制仿真结果
4 结束语
针对采用主动控制的传统独立轮对转向架,仿真表明,在采用PID控制策略进行主动导向时传统独立轮对转向架可在较大半径曲线获得较好的主动导向控制效果,而在通过小半径曲线时控制效果较差,车轮依旧依靠轮缘导向,轮对摇头角较大,进而产生较大的轮轨磨耗。降低一系悬挂纵向定位刚度可有效改善主动导向控制的独立轮对转向架小半径曲线磨耗问题,但又导致轴箱悬挂无法有效传递纵向牵引/制动力。
为解决以上问题,本文提出一种采用低纵向刚度轴箱悬挂与一系纵向拉杆的独立轮对转向架结构设计方案,在独立轮对轴桥与构架间设置一系纵向拉杆,实现转向架牵引/制动与导向功能解耦。转向架纵向牵引/制动力由一系纵向拉杆有效传递,而转向架一系悬挂纵向刚度则相对传统独立轮对转向架或刚性轮对转向架较小,以满足主动导向对一系悬挂纵向刚度的需求。纵向牵引仿真分析表明,本文所设计的独立轮对转向架可有效传递纵向力,确保车辆牵引/制动运行安全性;在PID 主动导向控制下设计的转向架可有效降低小半径曲线通过时轮对的横移与摇头,进而降低轮轨磨耗。研究结果表明,本文提出的转向架结构设计方案较好地解决了独立轮对转向架中主动导向与牵引/制动对于一系纵向定位刚度需求的矛盾。
猜你喜欢
建材发展导向(2021年7期)2021-07-16
哈尔滨铁道科技(2020年3期)2021-01-18
中华养生保健(2020年3期)2020-11-16
铁道通信信号(2020年10期)2020-02-07
电子制作(2018年17期)2018-09-28
中华诗词(2018年1期)2018-06-26
中学生数理化·高一版(2016年4期)2016-11-19
物理与工程(2016年3期)2016-08-31
铁道通信信号(2016年6期)2016-06-01
学习月刊(2015年1期)2015-07-11
