基于3D打印的三自由度码垛教学机械臂
2021-03-06 05:31郑凯强
卷宗 2021年1期
郑凯强
(南充职业技术学院机电工程系,四川 南充 637131)
1 工业机器人专业当前教学现状及存在的问题
当前虽然很多高职院校开设了工业机器人专业,但是大部分院校都存在同一个问题就是教学设备的投入不足导致学生无法深刻理解工业机器人的种类及工作原理。很多院校在设备投入之初考虑到设备的通用性与使用周期的时长性都会直接采用当下使用面最广、动作最灵活、功能最多样化的六自由度关节机械臂。但是这类机械臂虽然动作灵活功能丰富但其价格昂贵、结构复杂并且高职学生的基础本就不是太高,复杂的结构不利于学生的入门学习。而且工业机器人种类繁多例如:直角坐标机器人、圆柱坐标机器人、球坐标机器人等;只用六自由度关节机械臂进行教学使得学生对机械臂的结构无法全面认识,并且从六自由度机械臂开始进入学习也违背了循序渐进、由易到难的教学规律。工业机器人作为一个高度集成化的机电一体化产品,涉及机械、电气、控制等多方面的学科知识点,采用机器人成品进行教学无法很好的将各学科的知识点有机的串联起来锻炼学生学以致用的 能力。
2 基于3D打印的三自由度码垛教学机械臂
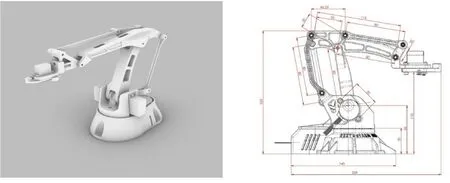
三自由度码垛教学机械臂采用完全3D打印的机械本体设计,可采用3D打印技术加工制造零件,零件制造简单便捷。码垛机械臂采用简易的平行四边形机构做为理论运动机构,在该机构的基础上可以设计出不同大小、不同形式、匹配不同电机的三自由度码垛机械臂。该机构结构简易并且具有末端始终与水平面保持平行的特点,非常适合码垛用途,并且该结构简单易于设计装配,学生在该机构的基础上可以自由发挥设计末端夹爪结构,利于学生创新能力的培养。不同形式的机械臂可采用市面上常见的MG996R、MG945、SG90、MG90舵机以及28BY-J48步进电机作为驱动电机进行驱动,这类电机都具有低电压易于控制等特点。机械臂的整体装配都采用标准M3、M4、M6螺钉以及对应螺母,螺钉长度根据实际需要选用,额外还需606轴承一粒,价格低廉易购,降低了装配难度。
3 采用3D打印的三自由度码垛机械臂进行教学的优点
采用该机械臂进行教学可以使学生由易到难循序渐进的系统学习工业机器人的机械结构。因机械臂结构简单小巧、并且采用3D打印制造机械本体的方式,学生可以自行动手完成从零件加工制造到装配成机械臂本体的全过程。在此过程之中学生可以更加深刻的理解机械臂的结构提升学生的实操能力与发现问题解决问题的能力。因为机械臂的驱动部分采取舵机或者小型步进电机提供动力所以可采用电子电路的方式进行控制,51单片机、Arduino、嵌入式芯片都可以完成对机械臂的驱动控制。恰好工业机器人技术专业一般都开设有单片机、嵌入式、C语言等课程,刚好可以利用此机械臂作为媒介将单片机、C语言、工业机器人技术基础这三门课程有机串联起来。学生利用所学单片机知识为机械臂设计制作控制电路,然后利用C语言所学知识为机械臂编写控制代码设计控制程序,并且可进阶控制APP程序的开发。利用这种多学科知识点融合的教学方式,使得各学科之间可以相辅相成,各学科之间不再是独立的教学而是考虑到各学科之间的联系,并且将各学科之间的知识点转化为实际应用,提升了知识的转化能力,使学生能够学以致用,学生所学及所见所得,学习成果不再是单一枯燥的考试分数,极大的提高了学生的学习兴趣与学习成就感,有助于教育教学的顺利推进。
4 3D打印三自由度码垛教学机械臂发展趋势
学生以此机械臂为原型设计出体积更大负载更强的码垛机械臂,例如采用42步进电机做为驱动电机的码垛机械臂。学生也可在此机械臂的基础上发挥创新思维设计多样化的末端夹具,结合机械创新设计等课程培养学生的创新能力,并可在此课程基础上继续与电气控制、机械设计基础等课程融合教学。
猜你喜欢
装备制造技术(2020年3期)2020-12-25
重型机械(2020年3期)2020-08-24
当代工人(2020年8期)2020-05-25
电子制作(2019年13期)2020-01-14
电子制作(2019年20期)2019-12-04
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
电子设计工程(2015年15期)2015-02-27
科技传播(2011年4期)2011-04-13