
机器视觉的低照度图像缺陷识别方法
2021-03-12 12:24陆金江
辽东学院学报(自然科学版) 2021年1期
陆金江
(安徽财贸职业学院 信息工程学院,安徽 合肥 230601)
低照度图像缺陷识别作为一种低照度图像处理方式,能够显著提升图像效果。低照度图像缺陷识别的发展背景是监控系统逐渐高清化,促使低照度图像的画质与分辨率不断提升。而在其实际应用中,在光照度较差的情况下,噪声会对可视信息造成极大影响,使物体边缘变得模糊不清,降低图像的实际视觉效果,造成低照度图像缺陷的出现。为提升光照度较差情况下的监控图像效果,需要通过低照度图像缺陷识别来实现缺陷的修复。低照度图像缺陷识别需要基于低照度图像灰度范围较为狭窄、空间相邻像素具备较高的相关性以及信噪比较低等特征来实现[1]。当前国内外都在积极开展低照度图像缺陷识别的相关研究以实现监控系统光照度较差情况下的图像质量提升。目前国外开展的低照度图像缺陷识别研究主要围绕低照度图像的增强来进行,有学者提出一种基于HE算法的低照度图像缺陷识别方法,主要通过HE算法重新分配低照度图像的像素值,使低照度图像的对比度获得提升,突出较暗区域的缺陷细节信息,实现低照度图像的缺陷识别[2]。而国内的低照度图像缺陷识别研究仍处于探索阶段,主要集中于低照度图像缺陷特征识别方面的研究。有学者提出一种基于AHE算法的低照度图像缺陷识别方法,主要通过AHE算法实现低照度图像缺陷处对比度的提升,获取缺陷处的细节信息,从而实现低照度图像缺陷识别[3];还有学者提出一种基于CLAHE算法的低照度图像缺陷识别方法,主要通过CLAHE算法对比度限制增加低照度图像缺陷处的幅值,并通过插值方法实现低照度图像的缺陷识别[4]。对低照度图像实施识别的过程中,现有低照度图像受自身导图以及光线影响,含有噪声图像,导致现有方法在图像照度在15~45lx的范围内存在缺陷区域图像对比度较低的问题,因此提出一种基于机器视觉的低照度图像缺陷识别方法。
1 设计基于机器视觉的低照度图像缺陷识别方法
1.1 低照度图像对比度增强
通过灰度变换算法改变低照度图像中各像素点的实际灰度值,并通过线性变换增强低照度图像对比度[5]。灰度变换算法的公式具体如下:
g(x,y)=T(x,y)f(x,y)。
(1)
其中:g(x,y)代表处理后的低照度图像像素实际灰度值;f(x,y)代表低照度图像像素的原始灰度值;T(x,y)代表处理时选择的灰度变换函数,也就是灰度值的输入值与输出值的实际变换关系[6]。
接着通过线性变换增加低照度图像中像素实际灰度值之间的对应动态范围,对低照度图像进行对比度拉伸,增强低照度图像对比度[7]。为了对感兴趣的低照度图像灰度区间进行突出并对不感兴趣的低照度图像灰度区间进行抑制,选择的线性变换函数为3段函数,具体如图1所示。

图1中:L代表低照度图像的灰度总级数;a、b分别代表低照度图像像素的某原始灰度值;c、d则分别代表处理后的低照度图像像素某灰度值[8]。
利用3段函数进行低照度图像线性变换的具体如公式(2):
(2)
其中,C(x,y)代表低照度图像对比度。
1.2 低照度图像降噪
根据有雾图像与低照度图像的反转图像之间的相似性对低照度图像进行降噪处理[9]。首先反转低照度图像,具体如公式(3):
Ic(x)=255-Lc(x) 。
(3)
其中:Ic(x)代表低照度图像的反转图像;Lc(x)代表低照度图像;c代表图像的3通道,分别为R、G、B。
接着对低照度图像的反转图像进行大气光估值。将输入的反转图像视为1个矩阵,并将其划分为相等的4个子矩阵。对子矩阵中全部像素的均值与标准差之间的差值进行计算,并通过计算结果对各子矩阵进行评分[10]。选择得分最高的子矩阵继续对其进行重复划分,将其划分为相等的更小的4个子矩阵并重复后面的操作,直到得分最高的子矩阵比指定的门限值小,将该矩阵中最短距离的颜色作为低照度图像反转图像的大气光估值,具体如式(4)所示:

(4)
其中,Ac代表低照度图像反转图像的大气光估值,(1,1,1)表示矩阵中最短距离的颜色坐标。
根据上式对低照度图像反转图像的对应最小值图像进行求取:

(5)
然后对低照度图像反转图像的对应G通道图进行最大值滤波,将滤波的结果图当做引导图,对最小值图像实施梯度信息融合的引导滤波,实现低照度图像的降噪,具体如式(6)所示:

(6)
其中:L′(x)代表最小值图像的梯度信息融合引导滤波;IG(y)代表滤波结果图即引导图;y代表最大值滤波。
最后利用大气散射函数求出低照度图像反转图像的透射率,具体如式(7)所示:

(7)
其中:t(x)代表低照度图像反转图像的透射率;A代表大气光估值的最大值。
根据大气散射模型对低照度图像进行反演复原,具体如式(8)所示:

(8)
其中:Jcn(x)代表低照度图像的反演复原图像;t0代表反演阈值[11]。
对低照度图像的反演复原图像再进行一次反转操作,即可得到去噪后的清晰低照度图像:
Jc′(x)=255-Jcn(x)。
(9)
其中,Jc′(x)代表去噪后的清晰低照度图像。
低照度图像降噪的具体流程如图2所示。

1.3 低照度图像特征提取
通过SIFT特征描述低照度图像的特征点,对低照度图像的特征进行提取。首先对高斯尺度空间进行构建。利用高斯函数对低照度图像实施卷积运算,完成低照度图像的模糊处理,获取低照度图像的高斯尺度空间[12]。接着对尺度空间的所有图像进行搜索,通过差分高斯对空间极值点进行检测。并通过高斯窗口加权运算尺度空间中的所有特征点[13]。最后对各方向上的梯度直方图进行绘制,共8个方向,绘制单位为像素块,大小为4×4。对各梯度方向的实际累加值进行计算,完成低照度图像的特征点描述。
1.4 低照度图像缺陷识别
根据提取的低照度图像特征,基于机器视觉构建低照度图像缺陷识别模型,实现低照度图像缺陷识别。构建的低照度图像缺陷识别模型包括网络传输模块、图像处理模块以及图像缺陷识别模块。
网络传输模块主要由网络变压器与USB接口构成,其中网络变压器能够利用脉冲波形变换转换网络信号;USB接口能够对通信进行控制与连接[14]。
图像处理模块主要由CMOS传感器与嵌入式ARM处理器构成。嵌入式ARM处理器为32位内核微处理器,能够进行低照度图像信息处理;CMOS传感器是一种机器视觉产品,能够将低照度图像根据颜色、亮度、像素分布等信息转换成数字化信号[15]。
图像缺陷识别模块主要通过调用图像缺陷识别函数进行图像缺陷识别,具体流程如图3所示。

根据图3可知,图像缺陷识别的具体过程为:
(1)打开CMOS传感器设备文件,采集设备信息并重新设置低照度图像参数信息及帧信息;
(2)将设备中的信息缓冲映射到内存空间中,并判断图像缺陷所处位置为单帧或者多帧;
(3)如果所处位置为单帧,则进行单帧图像缺陷识别;如果所处位置为多帧缺陷,则进行多帧图像缺陷识别,多帧图像缺陷识别通过SIGINT()函数完成。
根据上述过程完成低照度图像缺陷识别。
2 实验验证
2.1 设计实验
对设计的基于机器视觉的低照度图像缺陷识别方法进行实验验证。选取图像照度在15~45lx的范围内的低照度图像进行缺陷识别实验,选取的实验低照度图像数据集,具体如图4所示。

实验低照度图像数据集的具体图像数据如表1所示。
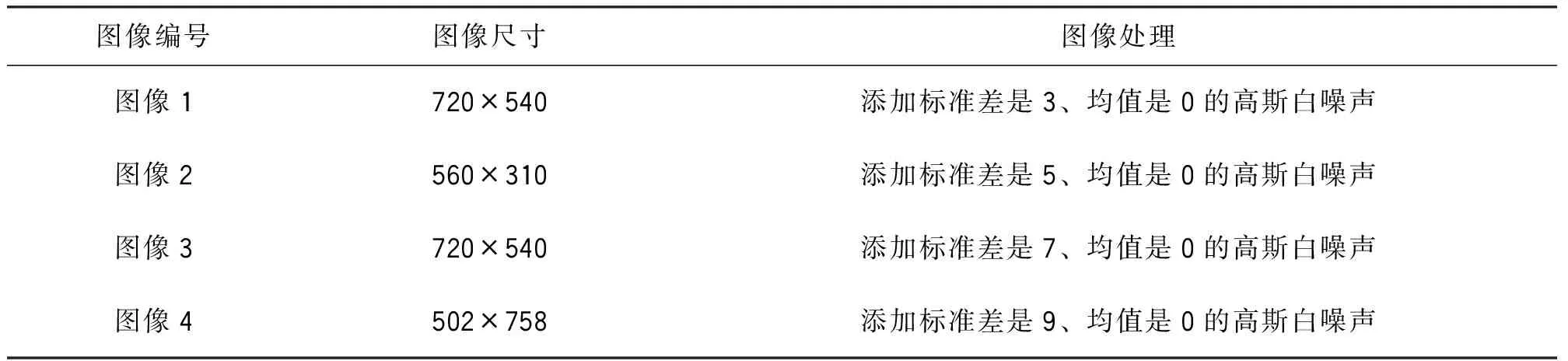
表1 实验低照度图像数据集的具体图像数据
实验低照度图像数据集均存在灰度值较低的区域。首先对实验低照度图像数据集进行对比度增强处理,接着实施降噪与特征提取处理,最后利用建低照度图像缺陷识别模型分别对数据集中的图像进行缺陷识别,获取缺陷识别后缺陷区域对比度实验数据。为了避免实验结果过于单一,将基于HE算法、基于AHE算法、基于CLAHE算法的低照度图像缺陷识别方法作为实验中的对比方法。分别利用这几种方法进行实验低照度图像数据集的图像缺陷识别,获取这几种方法的缺陷区域对比度实验数据作为对比实验数据。比较集中实验方法的缺陷区域对比度,观察基于机器视觉的低照度图像缺陷识别方法是否实现了缺陷区域对比度的提升。
2.2 对比度实验结果
对于图像1,基于机器视觉的低照度图像缺陷识别方法与基于HE算法、基于AHE算法、基于CLAHE算法的低照度图像缺陷识别方法的缺陷区域对比度实验结果如图5所示。

根据图像2的缺陷区域对比度实验结果可知,在识别时间为200s时,基于机器视觉方法、HE算法、AHE算法、CLAHE算法的识别方法的缺陷区域对比度分别为52.34%、38.08%、43.21%、34.74%,基于机器视觉方法分别高出3种对比方法14.26%、9.13%、14.6%。当识别时间达到400s时。基于机器视觉、HE算法、AHE算法、CLAHE算法低照度图像缺陷识别方法的缺陷区域图像对比度分别为79.64%、48.46%、58.98%、46.3%,基于机器视觉方法分别高出3种对比方法31.38%、20.66%、34.34%。
对于图像2,基于机器视觉的低照度图像缺陷识别方法与其他实验方法的缺陷区域对比度实验结果对比如图6所示。

根据图像2的缺陷区域对比度实验结果可知,在识别时间为200s时,基于机器视觉方法、HE算法、AHE算法、CLAHE算法的识别方法的缺陷区域对比度分别为62.98%、46.47%、44.16%、30.08%,基于机器视觉方法分别高出3种对比方法16.51%、18.82%、32.9%。当识别时间达到400s时。基于机器视觉、HE算法、AHE算法、CLAHE算法低照度图像缺陷识别方法的缺陷区域图像对比度分别为83.64%、68.32%、72.93%、60.25%,基于机器视觉方法分别高出3种对比方法15.32%、10.71%、23.39%。
对于图像3,基于机器视觉的低照度图像缺陷识别方法与其他实验方法的缺陷区域对比度实验结果对比具体如图7所示。

根据图像3的缺陷区域对比度实验结果可知,根据图像2的缺陷区域对比度实验结果可知,在识别时间为200s时,基于机器视觉方法、HE算法、AHE算法、CLAHE算法的识别方法的缺陷区域对照度分别为55.03%、52.78%、42.65%、22.98%,基于机器视觉方法分别高出3种对比方法2.25%、12.38%、32.05%。当识别时间达到400s时。基于机器视觉、HE算法、AHE算法、CLAHE算法低照度图像缺陷识别方法的缺陷区域图像对比度分别为75.96%、72.11%、51.85%、43.69%,基于机器视觉方法分别高出3种对比方法3.85%、24.11%、32.27%。
对于图像4,基于机器视觉的低照度图像缺陷识别方法与其他实验方法的缺陷区域对比度实验结果对比如图8所示。
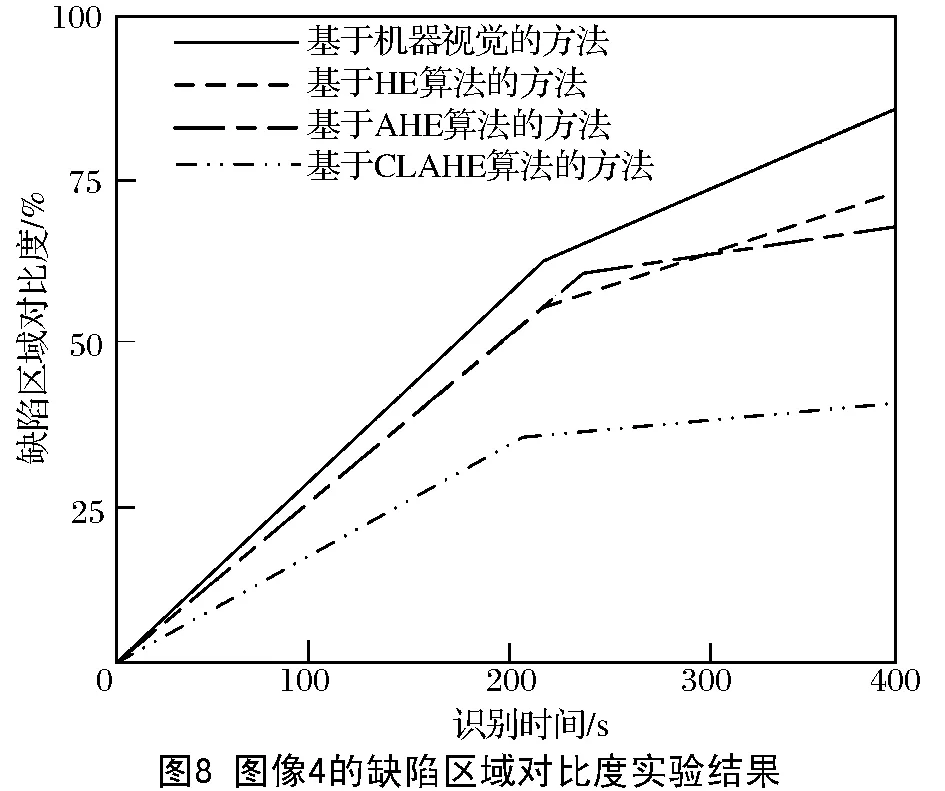
根据图像4的缺陷区域对比度实验结果可知,根据第2张图像的缺陷区域对比度实验结果可知,在识别时间为200s时,基于机器视觉方法、HE算法、AHE算法、CLAHE算法的识别方法的缺陷区域对照度分别为65.11%、51.97%、52.01%、33.78%,基于机器视觉方法分别高出3种对比方法13.14%、13.10%、31.33%。当识别时间达到400s时。基于机器视觉、HE算法、AHE算法、CLAHE算法低照度图像缺陷识别方法缺陷区域图像对比度分别为86.69%、73.60%、68.99%、46.69%,基于机器视觉方法分别高出3种对比方法13.09%、17.70%、46%。
综上所述,基于机器视觉的低照度图像缺陷识别方法的缺陷区域图像对比度在几种实验方法中始终保持最高。
3 结语
基于机器视觉的低照度图像缺陷识别方法成功实现了缺陷区域图像对比度的提升,对于低照度图像的缺陷处理具有很大参考意义。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
小哥白尼(军事科学)(2022年2期)2022-05-25
集装箱化(2021年1期)2021-04-12
天津医科大学学报(2021年1期)2021-01-26
中国信息技术教育(2020年2期)2020-02-02
应用心理学(2019年4期)2019-12-05
红领巾·萌芽(2019年8期)2019-08-27
CHIP新电脑(2016年3期)2016-03-10
汽车文摘(2014年2期)2014-12-14
数码影像时代(2006年5期)2006-05-29
