医院药品托运机器人作业安全设计
2021-03-22 03:32王秋惠赵瑶瑶
人类工效学 2021年6期
王秋惠,赵瑶瑶
(天津工业大学 机械工程学院,天津 300387)
1 引言
人口老龄化进程的加深与社会劳动力供给下降,导致劳动力成本不断增加,以机器人替代人力服务人类成为未来发展趋势[1]。目前我国医院药品人工传输方式存在成本高、人力资源浪费、安全性差等弊端,因此药品智能传输的需求不断增加[2]。相关文献显示[3-5],以智能机器人代替医护人员进行药品传输,可节省医院在物流方面耗费的人力资源并提高药品的安全性,高效准确的智能化配送方式可有效提高医护人员工作效率。目前,已有学者对医院智能托运机器人进行研究,ZHU等人[6],通过使用多功能模块化机柜设计来构建医疗传输机器人,实现多功能输送,节约医疗资源;Jeon S等人[7],运用穷举搜索算法进行优化,用于解决医院物流机器人多任务分配情况下最优路径的选择问题;Kang M S等[8],提出基于人体识别的实时环境感知技术,用于避免机器人作业过程中与障碍物发生碰撞;肖湘[9]针对传统图像传感器成本高、应用复杂等问题,设计了一款基于可见光识别科室和定位的医疗配送机器人。上述学者主要从技术结构及可用性设计理论方面对医院相关托运机器人进行研究,而对于其“人-机-环”系统下作业安全的研究较少。人工智能技术正逐渐影响医疗行业发展,使用药品托运机器人运送药品是现代社会发展的必然趋势,对其作业安全进行研究,可以帮助设计师在设计初期了解其作业过程中可能发生的失误,通过设计方法优化,以及降低医护人员面临伤害的可能性来配置人、机和环境之间的关系[11-12],提高药品托运机器人的作业安全性。
在安全科学研究领域中,层次分析法(The analytic hierarchy process,AHP)作为一种定性与定量相结合的评价方法被广泛应用[13-14]。AHP由专家依据经验通过主观判断获得权数,得到各指标的重要程度,但主观随意性较大、客观性较差[15]。粗糙集理论(Rough Set,RS)是解决不确定问题的数学工具,不需要任何先验信息,保证了数据的客观性[16],应用粗糙集理论中的粗糙数和粗糙边界区间可灵活发现原始数据中隐含的含糊性与不确定性[17]。运用粗糙层次分析法(Rough Analytic Hierarchy Process,RAHP)可将AHP的主观性与粗糙集理论的客观性有效结合来提高最终决策权重的准确性,实现对作业安全领域影响因素的分析判断。
因此,本文应用粗糙层次分析法,从人因工程视角,对医院药品托运机器人作业安全设计进行研究。通过对药品托运机器人“人-机-环”系统下作业安全影响因素进行量化分析,探究其人因系统作业安全设计原则,以期提升医院药品托运机器人作业效率与作业安全。
2 药品托运机器人作业安全设计研究流程
基于人机工学理论,从“人-机-环”系统分析药品托运机器人作业流程中存在的潜在风险,获取影响药品托运机器人作业安全的因素,从人、机、环三方面构建作业安全影响因素层次化模型。
为保证作业安全设计原则提出的科学性,提高影响因素权重决策的准确性,应用粗糙层次分析法对影响因素进行权重计算与排序,完成设计原则与实践。具体研究流程如图1所示。
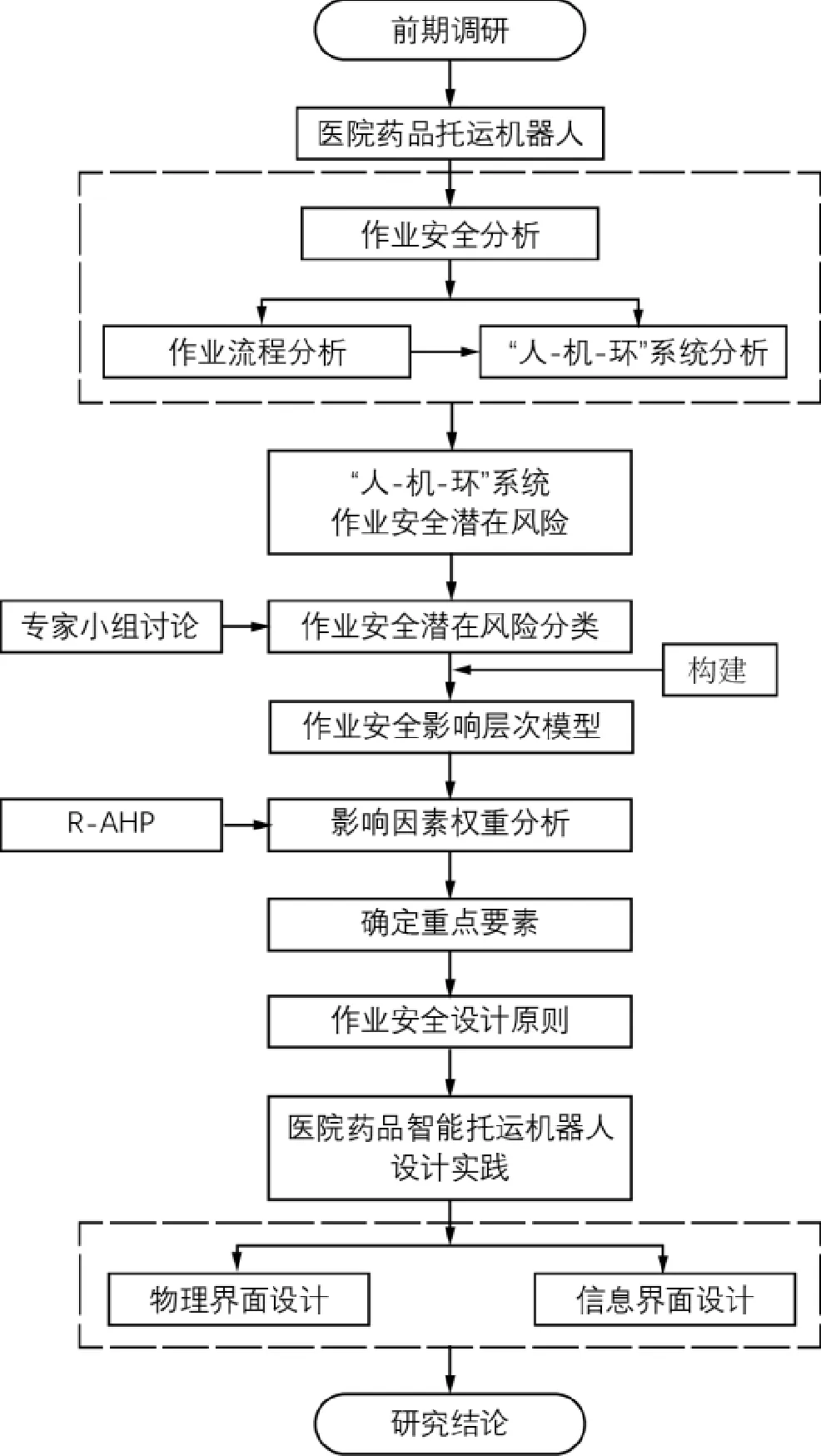
图1 研究流程
3 药品托运机器人作业安全分析
3.1 作业流程分析
通过对作业流程(见图2)进行分析,可以了解药品托运机器人作业过程中所涉及的交互行为,是分析“人-机-环”系统下药品托运机器人作业安全影响因素的基础。
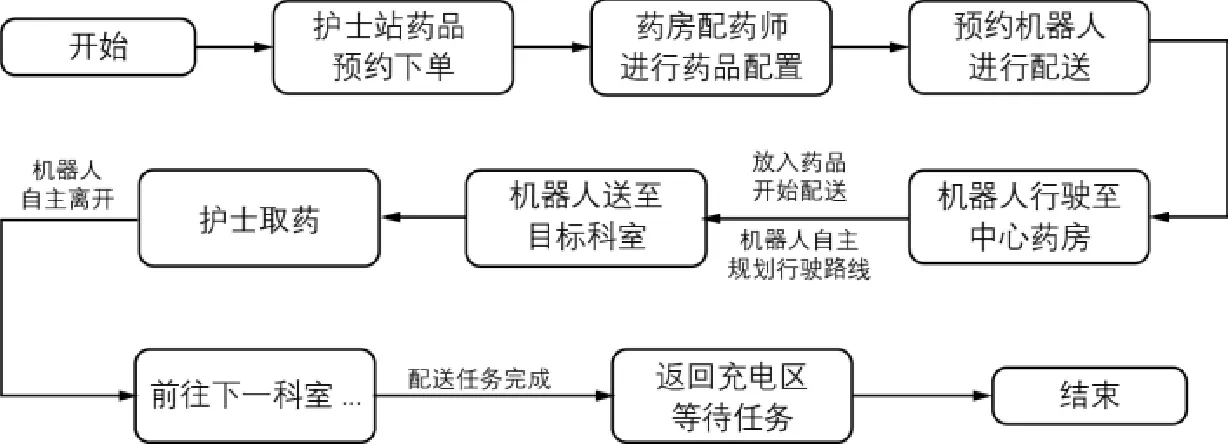
图2 医院药品托运机器人作业流程图
3.2 “人-机-环”系统分析
“人-机-环”系统将人、机器、环境作为三大要素进行考虑[18],医院药品托运机器人“人-机-环”系统模型,如图3所示。从人机系统全局出发,综合考虑人(医护人员)、机(医院药品托运机器人),环境(医院环境)三者之间的制约关系,以提高其复杂人因系统中人的安全性、舒适性、高效性等问题。根据作业流程,分析医院药品托运机器人“人-机-环”系统。
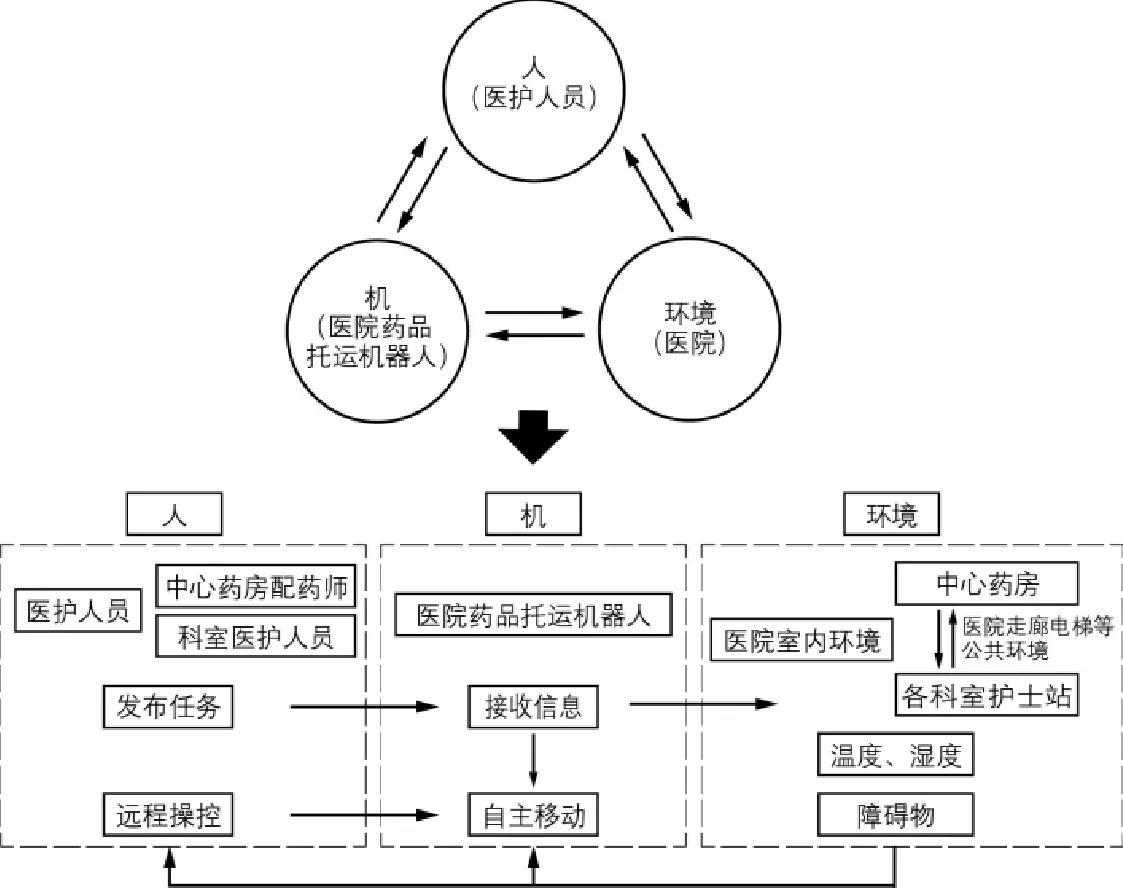
图3 医院药品托运机器人“人-机-环”系统模型
人对于任务信息处理过程可以分为“感知(S)-认知(O)-反应(T)”三个阶段[19],事故的发生取决于人在任务处理过程三阶段的行为性质。当医护人员未能发觉医院药品托运机器人交互界面所形成的对人感知层面的外部刺激,或对外部刺激的错误判断而产生错误的反应行动均可影响医院药品托运机器人作业安全。由于本身职业特点使得医护人员长期处于高负荷工作强度下,在进行药物拿取的过程中会存在未发觉显示界面出现的信号灯变化、异常声响、操作界面阅读失误等情况。且受外部环境及自身因素影响,主体认知存在差异,机器人界面与功能分配不当将增加医护人员的认知负荷,难以产生认知记忆,导致任务失败。
机的不安全因素是指引起事故、或可能引起事故的机械状态[20],药品托运机器人功能、信息显示、信息识别、人机交互操作流程以及内部控制器等都会不同程度对医护人员的操作行为产生影响。药品托运机器人内部零件多,受外部环境影响零件长时间工作发生老化、腐蚀,种种原因使得零件之间配合失效,最终导致其作业过程中发生故障,影响作业安全。医院药品托运机器人内部控制系统复杂,由电池模块、控制模块、运动模块、避障模块、导航及定位模块、无线通信模块、人机交互模块七部分组成[21],当医院设备维修人员没有定期对其进行设备检查,其设备内部模块在运行过程中将存在发生故障的风险。
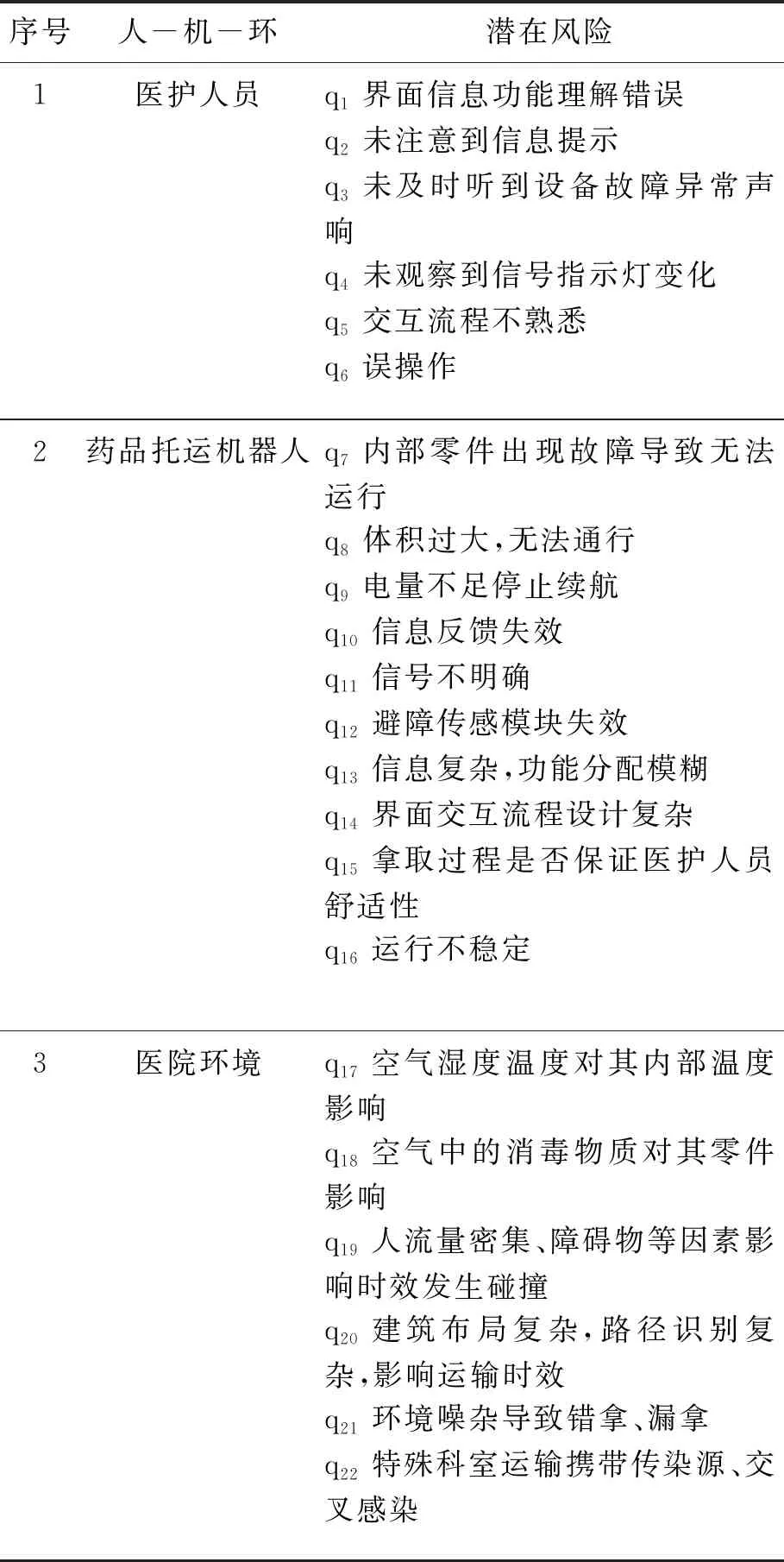
表1 医院药品托运机器人作业安全潜在风险
环境作为人、机共处的特定工作条件,药品托运机器人主要用于医院各科室护士站与中心药房之间的药品托运工作,其作业环境为医院内部走廊、电梯、中心药房及各科室护士站。伴随经济的发展,我国大型综合医院数量及规模逐渐扩大,医院建筑布局复杂、不同功能的科室数量多,多种病源并存[22],对药品运输过程中的路径规划、避障模块以及箱体密封性等提出挑战;且其内部软件设备及精密零件多,环境湿度与温度会影响其使用寿命与内部箱体的环境状态。如今,随着医院就诊人数的增加,人流量密集将影响药品托运机器人运输时效以及导致机器人运输过程中与行人发生碰撞。患者数量多以及部分工作环境环境噪声大,将增加医护者工作压力,致使医护人员在进行药物取放过程中,发生药品误拿、错拿的情况。
3.3 作业安全潜在风险分析
通过对医院药品托运机器人作业流程及“人-机-环”系统分析,总结其“人-机-环”系统中存在的潜在风险,见表1。
4 药品托运机器人作业安全影响因素模型
4.1 作业安全影响因素层次分析模型
根据上述对医院药品托运机器人作业安全的分析,通过专家小组讨论将作业过程中存在的潜在风险进行聚类与精简,建立医院药品托运机器人作业安全影响因素层次分析模型,见图4。
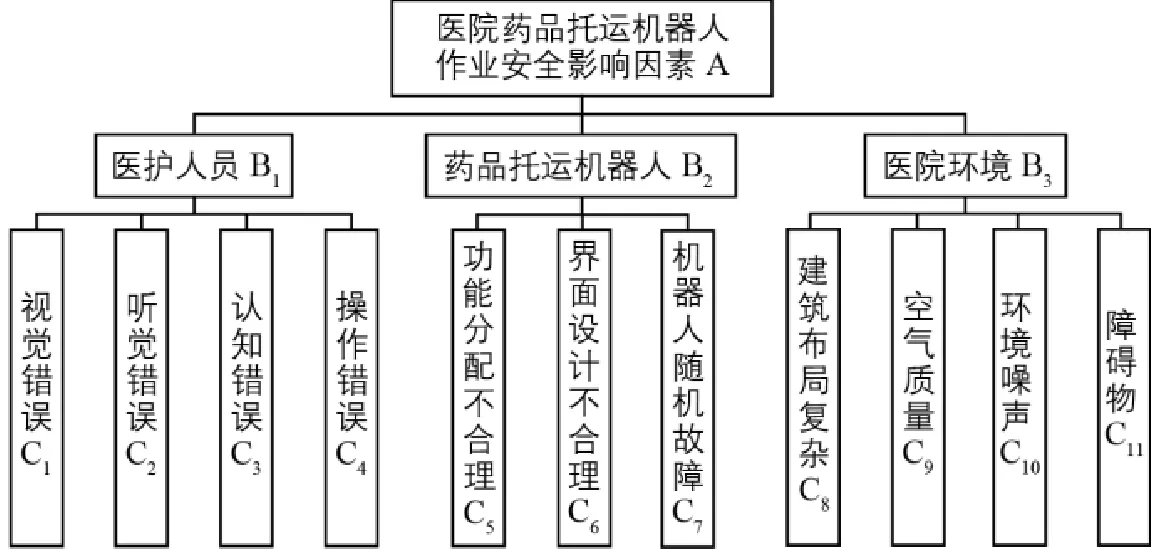
图4 医院药品托运机器人作业安全影响因素层次分析模型
4.2 作业安全影响因素权重计算
粗糙层次分析法是将粗糙集理论中的粗糙数与粗糙边界区间两者优点结合并应用于层次分析法之中,可解决传统层次分析法主观性较大的问题[23]。邀请5位相关领域具有多年经验的专家采用1-9标度法对影响因子进行打分,构建各层对上一层每一因素的成对比较矩阵。对第一层Bi进行打分共获得五组判断矩阵MNi (N为人数,i = 1,2,3,4,5):
根据公式(1)公式(2)对判断矩阵进行一致性检验,求得上述5个判断矩阵的一致性检验结果为:CR1=0.0747,CR2=0.0565,CR3=0.0942,CR4=0.0465,CR5=0.0565。CR值均<0.1,说明评分结果具备一致性。
CI=(λmax-n)/(n-1)
(1)
CR=CI/RI
(2)
通过建立粗糙群决策矩阵,求解矩阵中元素的粗糙数。将上述判断矩阵MNi转化为粗糙群体决策矩阵W*:
W*=

“划分5”的粗糙数为:



Z1=


根据公式(3)对特征向量N1、N2进行规范化处理,求解结果为
(3)
由此,根据公式(4)可得第一层影响因子权重f(Bi)=[0.5311,0.3515,0.1174],即:B1>B2>B3。
(4)
同理求解Ci影响因子权重,结果如表2所示。根据公式(5)计算得影响因子最终权重指数f(Di)。
f(Di)=f(Bi)×f(Ci)
(5)
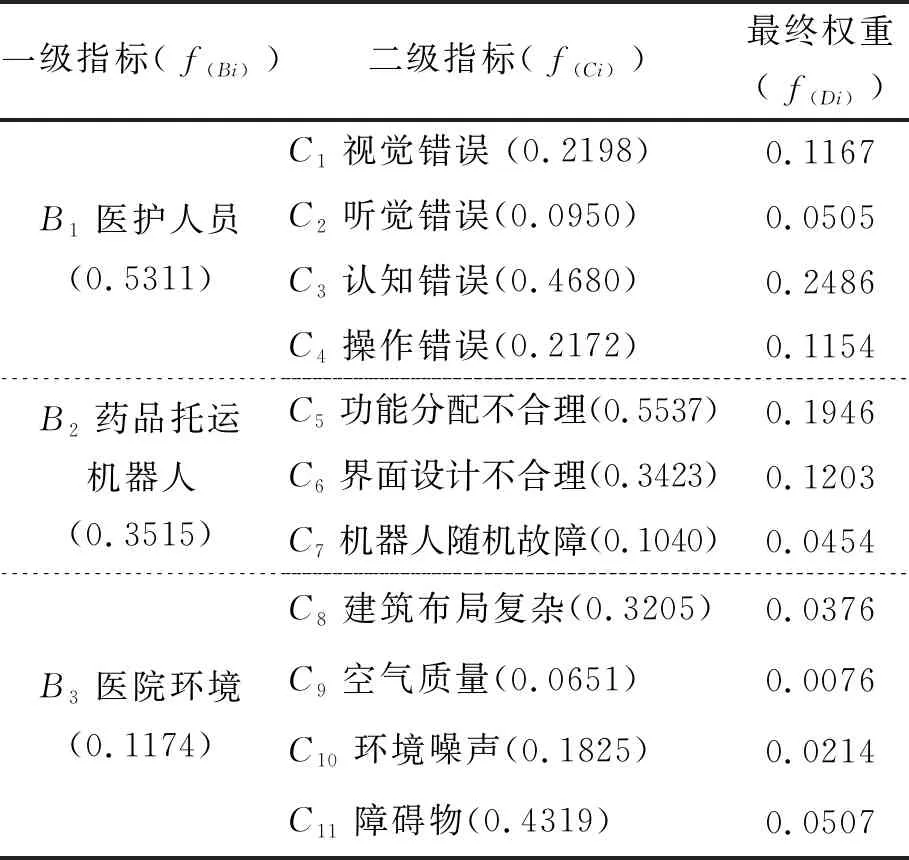
表2 医院药品托运机器人作业安全影响因素权重
由表2数据结果可得:B1中作业安全影响因素排序为C3>C1>C4>C2;B2中作业安全影响因素排序为C5>C6>C7;B3中作业安全影响因素排序为C11>C8>C10>C9。本次选取各二级指标中的前80%影响因素作为主要影响因子进行分析,作为后续药品托运机器人设计原则提出的依据。作业安全影响因子为:C1、C3、C4、C5、C6、C8、C10、C11。
5 药品托运机器人作业安全设计原则
根据表2数据结果所得药品托运机器人作业安全重点影响因子,从界面宜人性、功能安全性及环境适应性三个方面提出针对性设计原则,如下:
5.1 界面宜人性原则
人作为影响药品托运机器人作业安全的主要因素,以人为中心,提高交互界面的宜人性是降低医护人员操作过程失误率的重要措施。
(1)物理交互界面设计应从医护人员出发,尺寸设计着重考虑医护人员的工作特征以及作业空间下的作业姿势、作业习惯,提高物理交互的宜人性与自然性。外观功能设置应清晰明了,降低人员操作过程的认知难度,提高操作过程的宜人性与安全性。
(2)信息交互界面设计应考虑人的行为习惯,分析操作过程中可能存在的失误,设置一定的容错设计。在视觉层面上突出不同元素之间的优先级,层级设置不易过多,简化交互流程,减少操作错误的发生;界面操作的文案、图标所代表的语义应明确、一致,以降低医护人员视觉认知偏差;而在实际交互过程中可能存在误操作行为,因此,界面设计应设置返回步骤,提高操作准确性。
5.2 功能安全性原则
药品托运机器人的作业环境与使用人群特殊,完善功能分配的合理性是提高其作业过程安全性的重要措施。药品托运机器人基本功能为移动功能、药品运输功能、人机交互功能和路障识别功能。
(1)移动功能是药品托运机器人进行药品运输的基本及必备功能,保证运行过程的稳定性是提高其作业安全的重要措施。合适的移动速度可保证机器人运行的稳定性与障碍识别的准确性;大轮毂设计及独立悬挂减震设计可确保机器人通过的稳定性,提高运行的安全性。
(2)药品运输功能是其基础功能,运输对象特殊,因此保证运送过程中药品不被污染是保证药品运输安全性的重要措施。封闭式箱体设计可保证机器人运输过程中的安全性;身份识别模块可保证药品拿取的准确性;内置紫外线消毒装置可保证药品放取过程不被污染。
(3)人机交互作为人与机器交互的过程,提升人机交互安全性,设计应考虑降低人操作错误发生的几率以及降低错误操作所带来的风险。设计应符合人机工程学,功能布局清晰明确,操作界面简单易懂,以此降低用户操作错误发生的概率。设置听觉、触觉、视觉等反馈机制对用户操作的进行指引提示,使用户意识到操作的错误,降低错误发生的风险。
(4)路障识别功能可保证机器人运行过程中的安全性,只有准确识别动态环境下的障碍物,并实时避让才能保证运输过程中机与物的安全性。多模式传感装置实时感应动态环境变化,使机器人能够进行实时避让是保证其运行过程安全的重要措施。
5.3 环境适应性原则
医院环境特殊、布局复杂、各空间尺寸固定,因此药品托运机器人设计应加强其对非动态与动态环境的感知及适应能力,保证其作业过程中人、机、物的安全。药品托运机器人应具备非动态及动态环境感知识别能力,以保障其作业环境下运行的安全性;外观尺寸设计应考虑目前医院的建筑布局及空间尺寸限制;对于部分病区可能存在环境噪声过大的弊端,可通过语音提示装置对周围人员进行提醒;外观造型配色应考虑医院整体环境,避免突兀。
6 药品托运机器人作业安全设计实践
基于上述分析所得作业安全设计原则,从尺寸设定、功能结构及人机交互三个层面,对药品托运机器人物理界面与信息界面进行设计实践。
6.1 物理交互界面设计
药品托运机器人造型设计以方形为主,边缘采用圆角处理,主体配色以白、灰为主,点缀以蓝色,整体简洁沉稳,与医院环境相协调,物理界面设计方案见图5。
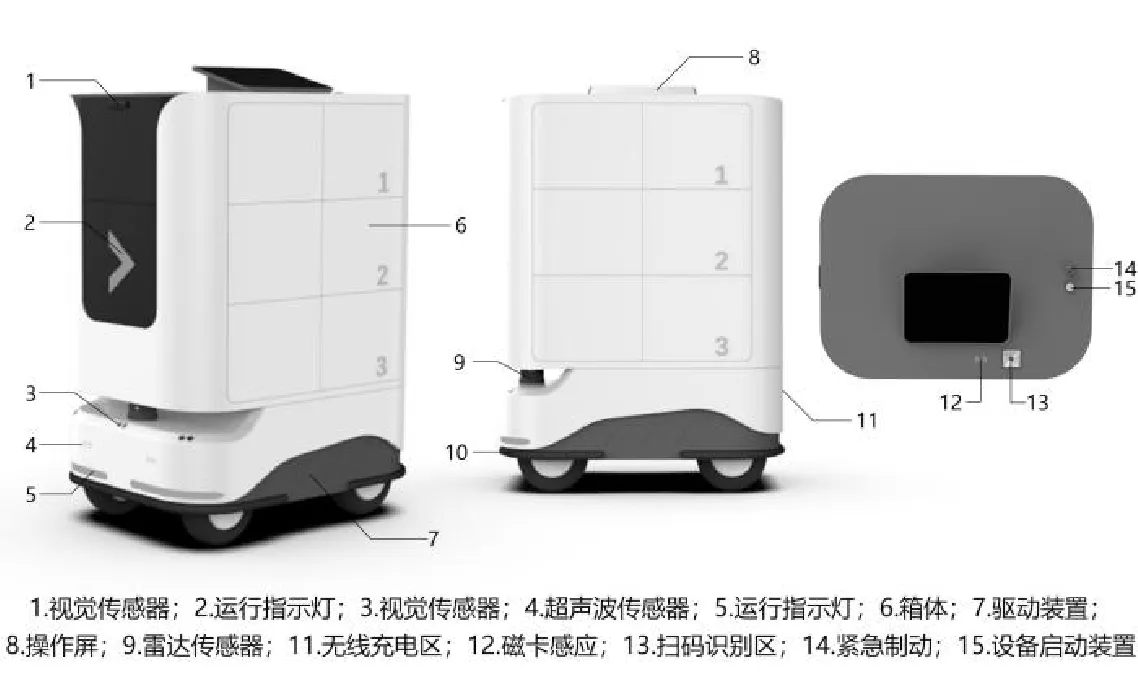
图5 医院药品托运机器人物理界面设计方案
提高人机交互宜人性与环境作业空间的适应性,尺寸设计综合考虑药房及护士站作业空间、医院走廊尺寸[24]与人立姿工作岗位作业尺寸[18],人机尺寸如图6所示。
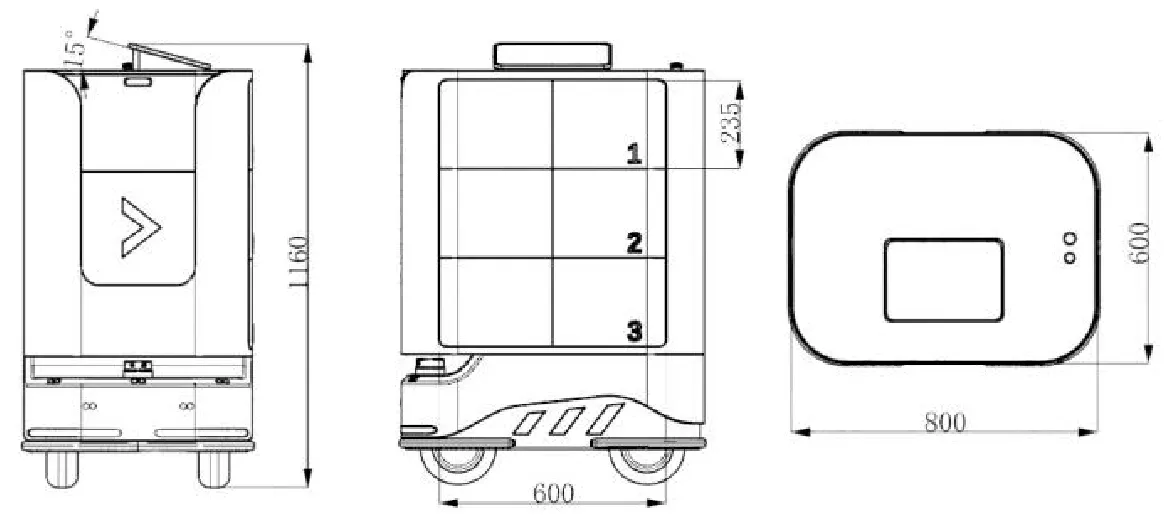
图6 医院药品托运机器人尺寸图
结构分为药品托运机器人主体、底盘和人机交互屏幕。主体部分为箱体、箱体内部消毒模块、紧急制动装置、视觉传感装置和运行状态指示灯;底部包括驱动装置、防撞保护、超声波传感装置、故障警示灯、定位模块和电池模块;人机交互模块主要包括功能选择、智能识别、语音交互模块,提高交互过程的高效性与自然性。
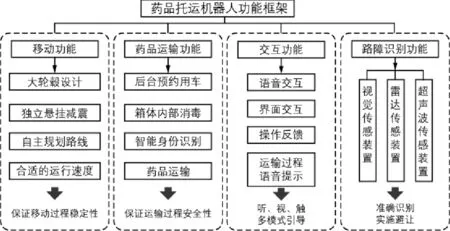
图7 医院药品托运机器人功能分析
根据作业安全影响因素结果与设计原则,构建药品托运机器人功能框架如图7所示。从移动、运输、交互、识别四方面进行功能分类,以保证移动过程的稳定性、运输过程的安全性、交互过程的自然性和路障识别的实时性,提高药品托运机器人整个作业环节中人、机、物的安全性。
6.2 信息交互界面设计
为降低交互过程中人为失误的发生,提高操作的准确性,基于药品托运机器人作业流程分析,引入HTA建立其操作层级框架(见图8),指导信息交互界面设计。
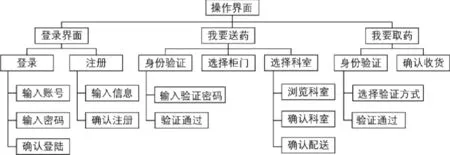
图8 医院药品托运机器人操作层级框架图
为降低操作过程中的认知难度,减少操作失误发生的几率,提高操作安全性,界面功能设置为系统登陆、送药、取药;界面设计减少操作层级,简化操作流程、明确操作任务。送药模块操作功能为用户登录、柜体选择、科室选择;对科室进行分类,使选择更加清晰。取药模块操作功能为身份识别,用户只需选择进行验证方式即可进行取药。
对于界面操作设置实时反馈,以降低错误操作带来的风险。在医护人员进行交互过程中,界面针对每一步操作将会发生相应的变化;操作点击过程将会有实时语音提示,若发生错误操作会有震动反馈,确保操作流程的准确性,一定的容错及反馈设计可降低医护人员使用过程中错误的发生。药品托运机器人信息界面设计交互流程图见图9。

图9 医院药品托运机器人信息界面设计交互流程图
7 结论
为提高医院药品托运机器人的作业安全,研究提出其“人-机-环”系统下作业流程中存在的不安全因素,建立基于粗糙层次分析法的作业安全影响因素层次模型。研究发现,人是影响医院药品托运机器人作业安全的主要因素,而优化药品托运机器人界面及功能避免医护人员认知错误是改善其作业安全的重要措施。最终,从界面、功能和环境适应三个方面提出了药品托运机器人作业安全设计原则,从功能完善及交互提升方面对药品托运机器人进行设计实践,为未来相关机器人作业安全理论研究及应用实践提供参考。
猜你喜欢
大众文艺(2022年19期)2022-10-19
包装工程(2022年14期)2022-07-28
安徽商贸职业技术学院学报·社会科学版(2022年1期)2022-04-25
销售与市场(营销版)(2021年8期)2021-08-30
诗潮(2021年1期)2021-03-15
环球时报(2020-06-24)2020-06-24
海峡姐妹(2020年4期)2020-05-30
海峡姐妹(2020年3期)2020-04-21
中国新闻周刊(2020年5期)2020-02-22
科技传播(2019年23期)2020-01-18