基于智能电动汽车的纵向车速跟随控制策略
2021-03-29 09:39窦宝华郭璧玺张旭
汽车实用技术 2021年5期
窦宝华,郭璧玺,张旭
(1.上海电气集团智能交通科技有限公司,上海 201499;2.长安大学汽车学院,陕西 西安 710000;3.上海綦穹机电设备有限公司,上海 201499)
1 引言
近年来,自动驾驶辅助系统在车辆上的应用越来越多,随着时代的发展,自动驾驶技术无疑将成为最热门的研究技术之一。由于自动驾驶技术在军事领域以及商业无人打车领域具有无限的潜力并可解决交通安全等问题,所以,各国政府机构以及各大科技公司纷纷投入到无人驾驶技术的研究中[1]。智能汽车的纵向运动控制技术是自动驾驶领域的关键技术之一,因此,国内外车辆技术研究人员对此进行了广泛地研究。文献[2]基于模糊控制对滑模纵向控制器进行了改进,抑制了滑模控制的抖动问题,并削弱了外部干扰对控制系统的影响,具有较好的鲁棒性和跟踪准确性。卡内基梅隆大学在参加2008年的DARPA 挑战赛时,基于PID 控制方法设计了一种非线性PID制动/油门控制策略,并构建了以速度偏差为输入的油门/制动切换策略,搭载该控制系统的智能车最终取得了第一名的成绩[3]。文献[4,5]经过对车辆的系统辨识搭建了车辆的动力学模型,并分别结合PI与模糊控制等控制方法构建了一种车辆速度自动控制策略,削弱了因动力学模型精度低带来的影响,并提高了系统的抗干扰性能。
本文采用直接式控制结构进行纵向车速跟踪控制策略的设计。首先,对基于速度误差的制动和油门切换逻辑进行改进,设计了一种切换缓冲区间阈值可调的切换逻辑。然后,设计了一种对车速变化具有自适应性的PI控制驱动策略,除此之外,设计一种基于模糊控制的制动控制策略,能避免车辆发生“前冲现象”所带来乘坐不适,并提高了纵向车速跟踪算法的精度、适应性等。
2 纵向动力学建模
2.1 动力及传动系统建模
由于中小型电动汽车的电机调速范围很宽,这些车辆则取消了变速器装置,那么纯电动汽车的动力及传动系统就是包括电机、电机控制器及主减速器。电机控制器与电机的作用是将输入电机控制器的需求扭通过控制电机输出轴输出相应的扭矩,该扭矩应与需求扭矩近似相等,然后再通过主减速器将电机输出轴的输出扭矩进行减速增距。因此,有如下公式:

式中To为电机的输出扭矩,Ti为输入给电机控制器的需求扭矩,Tm为作用于驱动桥上的扭矩,i0为主减速器的传动比,ηt为传动系的传动效率。
2.2 整车纵向动力学建模
做纵向运动的车辆,其在纵向上主要受到制动力/驱动力、滚动阻力、空气阻力等力的作用[6]。车辆纵向受力分析要分驱动与制动两种状态进行讨论,因此,要分别建立两种状态下的车辆纵向运动数学模型。假设车辆在平坦的路面上行驶,并忽略车辆的加速阻力,则有如下公式。
驱动工况表达式:

制动工况表达式:

3 智能电车的车速跟踪控制器设计
车速跟随控制是通过驱动/制动切换逻辑来协调相应的驱动和制动控制算法,最终使得车辆能快速地以较高精度跟踪上期望车速。因此,车速跟踪控制算法可以分为切换策略、驱动控制策略、制动控制策略。本文所设计的车速跟踪控制器是对速度偏差为输入的油门/制动切换策略及PID驱动、制动策略的改进。

3.1 切换规则
目前广泛研究的车速跟踪控制器的切换规则为:设置一个缓冲区域(-a,a),a>0,通过判断速度误差值是落在缓冲区间内部及外部的位置来协调驱动与制动控制算法起作用[7,8]。因此,阈值a的设置是关键,适当增大a,会降低驱动与制动之间的切换频率,但是车速跟踪精度会降低;适当减小a,会提高车速跟踪精度,但是会增大驱动与制动的频繁切换。基于上述问题,设计一种阈值a可调的驱动/制动切换策略,该阈值可随速度误差(绝对值)的大小进行自适应调节。通过设置另一个阈值b,该阈值为最大允许车速误差与最小允许车速误差的绝对值之均值,当速度误差小于阈值b时,则应适当增大原有的阈值a,尽可能避免驱动与制动的频繁切换,当速度误差大于阈值b时,则应适当减小原有的阈值a,保证车速跟踪精度。则有如下公式:

式中u为驱动或制动控制量,ut代表驱动控制量,ub代表制动控制量,e为期望车速与当前车速之差,a为缓冲区间的阈值,b,C1,C2均为常数。
3.2 PID驱动、制动控制策略
本文基于 PID控制方法进行驱动与制动控制策略的设计,由于加入微分环节常常会导致PID控制器的输出抖动增加,因此,在保证车速跟踪精度的前提下删去微分环节,以提高车辆的乘坐舒适性。
3.2.1 PID驱动控制策略
经过理论分析可知,当由规划车速求解出的期望加速度(绝对值)越大时,则下一控制时刻就需要更大的驱动控制量或制动控制量,以能更快地跟踪上期望车速,降低控制系统的延迟性并提高跟踪精度,因此设计了一种基于加速度大小比例增益可调的PID驱动算法。则有如下公式:

式中ac为期望加速度,m为不为零常数以避免ac=0时比例环节输出为零;ek为当前时刻误差;T为控制器的指令周期;kp、ki为比例增益与积分增益;uk+1即为驱动控制算法输出的电机输出轴期望扭矩。
3.2.2 PID制动控制策略
类似于3.2.1中的PID算法,建立了基于减速度大小比例增益可调的PID制动算法:

式中,ab为期望制动减速度,m为不为零常数。
在智能汽车的纵向车速跟随控制过程中,制动控制量的好坏是决定车辆乘坐舒适性的必要条件,而评价制动控制量好坏的标准则是在保证一定跟踪精度的前提下避免车辆在制动时发生“前冲现象”,即减小制动控制量的抖动与突变。为避免发生“前冲现象”,可在PID的输出端加一个滤波模块,并对其结果进行分级输出,以达到人类驾驶员的点刹效果。
如图1所示为本文所设计的智能电车车速跟踪控制系统的结构框架图:

图1 车速跟踪控制系统的结构框架
4 仿真分析
为了验证本文所设计车速跟踪控制算法的有效性,本文采用 MATLAB/Simulink 与 Carsim、Amesim软件联合搭建仿真模型进行验证,使用Carsim与Amesim软件分别搭建整车模型和电池电机驱动系统模型。在MATLAB/Smulink下建立车速跟踪控制器的控制算法。MATLAB/Simulink 与Carsim、Amesim联合仿真的具体模型如图2所示。

图2 MATLAB/Simulink 与 Carsim、Amesim联合仿真模型
为了能说明本文所设计的车速跟踪控制器能适应多种工况,因此将期望车速设置为同时包括加速、减速以及匀速三种工况。将带固定阈值缓冲区间的PID车速跟踪策略的仿真结果与本文改进后的车速跟踪策略的仿真结果做对比,通常,应将缓冲区间设为(-3km/h,3km/h)以能较好地权衡跟踪精度与驱动/制动的切换频率[9,10]。
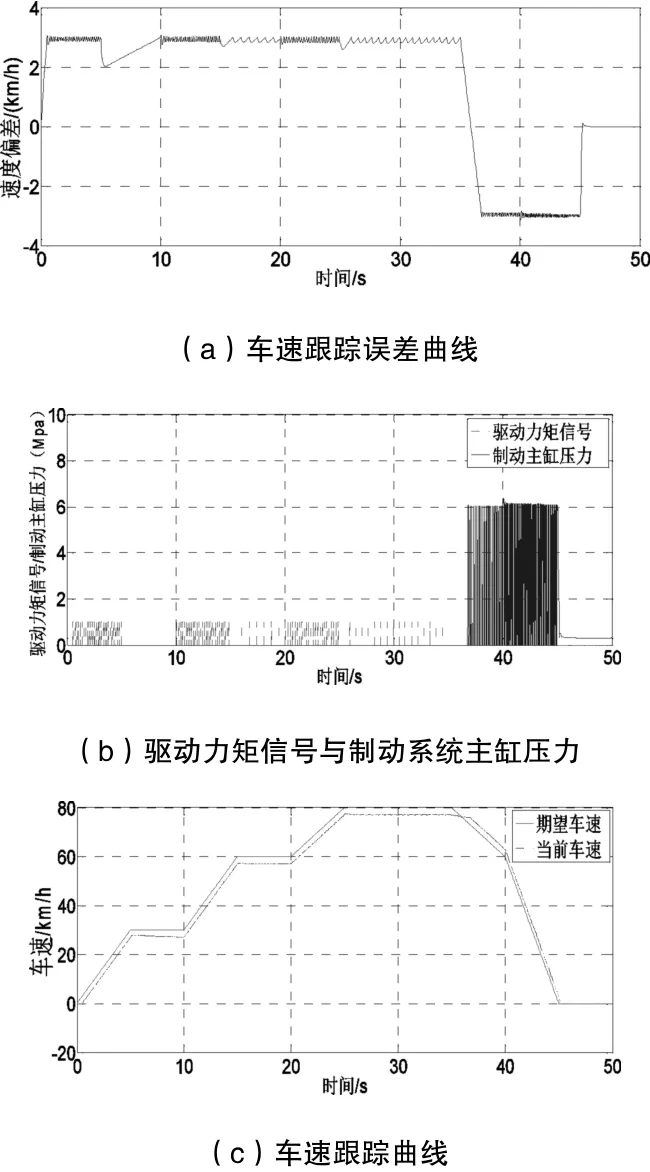
图3 常规PID车速跟踪策略的仿真数据图

图4 改进后的PID车速跟踪策略的仿真数据图
将常规PID与改进后的PID车速跟踪控制策略分别进行了仿真,为了使带固定阈值缓冲区间的常规PID与改进后的切换策略达到相似的效果,即都无制动与驱动的频繁切换,可将阈值设的稍大些,这是以牺牲一定的跟踪精度作为代价,因此,得到了如下仿真结果分析。常规PID的车速跟踪控制算法的仿真结果如图3所示,改进后PID的车速跟踪控制算法的仿真结果如图4所示。图3(a)中的车速跟踪误差范围为-3~3km/h,误差均值为2.52km/h,图4(a)中的车速跟踪误差范围为-3~1.8km/h,误差均值为 0.81km/h,并且小于人工驾驶时的车速跟踪误差-4~4km/h,因此,改进后的PID车速跟踪策略的控制精度有一定地提高。除此之外,将图3(b)的驱动信号和制动系主缸压力与图4(b)的驱动信号和制动系主缸压力对比分析后可以发现,图3(b)中的驱动信号波动剧烈,而图4(b)中的驱动信号波动频率很低,并且,图3(b)中的制动信号抖振现在剧烈,很容易导致车辆在制动时发生“前冲现象”,舒适性较差,而图4(b)中的制动信号波动频率很低,并可实现制动力的分级输出,类似于驾驶员的点刹操作,车辆乘坐舒适性好。从图4(c)的仿真结果可知,改进后的PID车速跟踪控制器可实现对多种不同工况的目标车速进行跟踪,具有一定的自适应性。由上分析可知,改进后的PID车速跟踪控制器在保证跟踪精度的前提下,提高了车辆乘坐的舒适性,并且其具有一定的适应性。
猜你喜欢
时代汽车(2022年17期)2022-09-06
现代电子技术(2022年11期)2022-06-14
建材发展导向(2021年19期)2021-12-06
现代计算机(2021年10期)2021-05-28
现代计算机(2021年3期)2021-03-24
汽车杂志(2018年6期)2018-06-25
中国测试(2018年9期)2018-05-14
作文周刊·小学一年级版(2017年27期)2017-08-10
计算机辅助工程(2016年3期)2016-08-01
科技视界(2016年2期)2016-03-30