
水下机器人推进器状态评估智能方法研究*
2021-04-02 03:16田军委崔鹏飞孙江龙
西安工业大学学报 2021年1期
王 轩,田军委, ,崔鹏飞,孙江龙
(1.西安工业大学 机电工程学院,西安 710021;2.西安工业大学 电子信息工程学院,西安 710021)
为了应对更大的作业深度、更复杂的海流条件,保障水下机器人(Romote Operated Vehicle,ROV)水下任务的顺利有效进行,提高作业的安全性,ROV推进器的状态评估技术显得尤为重要[1]。由于推进系统主要由推进电机、电调和螺旋桨组成,且运行过程中各个部件的状态相互影响,这无疑对推进器的状态评估带来了困难,然而推进器的安全状态是针对整体而言的,对ROV的推进器进行状态评估,为ROV在水下的安全航行以及航行前的维修工作提供了参考[2]。
文献[3-4]将模糊神经网络运用在船舶的电力推进系统的状态评估中,实验表明其在船舶电力推进系统状态评估中具有一定的准确性,但是网络模型的建立需要设备的技术参数、在线监测数据等状态参数,不适合状态参数少的系统。文献[5]中建立一种基于时间序列分析的非线性关系模型来拟合设备综合健康指数的变化趋势,评估未来健康状态并预测维护时间节点,研究结果表明该模型具有一定的有效性与合理性,但是该方法同样不适合状态参数少的系统。文献[6-7]中运用小波分析法设计了一种基于电机电流特征分析的状态检测方法,实现了对变速箱和感应电机的状态监测,实验表明小波分析可在参数少甚至单一参数的情况下提取系统的状态信息,但是小波分析对信号的细节部分不再继续分解,这就导致该方法只适合对同种部件的不同故障进行识别,不适合复杂的系统或设备。在小波的基础上发展起来的小波包(Wavelet Packet,WPT)理论适合用于复杂设备的信号处理。
本文针对小型水下机器人的推进器设计了一种基于信号处理的评估方法,在只有电流信息的情况下,利用小波包提取推进器在正常,以及各部件发生故障时定子电流信号的特征信息,通过所设计的BP神经网络,能够得到每一个部件发生故障的概率,根据故障概率求出推进器的整体健康度。
1 基于小波包的特征提取
对于水下推进器来说能够反映健康状态的参数难以采集,所以选择对相对容易采集的推进电机的定子电流信号进行研究,传统的基于小波的分析方法,只对信号的低频部分进行分解,然而小波包变换具有类似于离散小波变换的多分辨率分析框架[8],能同时分解信号的高频部分和低频部分,因此,小波变换不会丢失原信号所携带的推进器状态信息。所以选择利用小波包对定子电流信号进行分析[8-10]。为方便起见,只对A相定子电流进行分析。
1.1 信号的分解与重构
小波包变换是进一步对小波空间按照二进制分式进行频率的细分,若分解层数为l,则分解后的节点数为2l。
小波包分解算法为
(1)

由式(1)可知,小波包分解每次得到的结果都是两个序列,而这两个序列都要进行进一步的分解,即分解过程对低频部分和高频部分都要进行,从而使信号高频部分的分辨率也得到了提高。
小波包重构算法定义为
(2)
其中hl-2k,gl-2k为小波包重构的低通、高通滤波器系数。
相对于小波变换,小波包变换具有更强的适应性和良好的时频定位特性,能够对各种时变信号进行有效的分解,小波包基函数的选择直接影响着推进器故障信号的提取效果,进一步影响状态评估的结果。选择DB4作为小波包母函数,选择不同的分解尺度,所对应的检测结果也不一样,本文根据电机运行速度和采样频率,采用的DB4小波包对定子电流信号进行5层分解,则一共有32个节点,即将采样信号划分在了32个细分频带上,提取第5层上所有频率成分的信号特征,以S(5,j)表示第5层的第j个节点,其中j=0,1,…,31。
1.2 定子电流的频带能量提取
当推进器出现故障时,小波包分析主要表现在对不同频率段的电流信号具有不同的抑制和增强作用。当用一个含有丰富频率段成分的信号作为输入信号对系统进行激励时,系统故障对各频率成分的抑制和增强作用将发生差异性变化。通常,对某些频率成分会起抑制作用,而对另一些频率成分起增强作用。由于故障与正常情况相比在相同频带内信号的能量会有显著差异:使某些信号能量减小而会使另外一些信号能量增大。小波包分析输出信号的各频率成分能量的变化情况表征了系统参数的变化,即实现了故障识别。
设Si,j,i=0,1,2,…,j=0,1,…,2i-1,表示小波包分解到第i层,第j个频段的重构信号,则第i层信号Si可表示为
(3)
设第i层第j个频带信号的能量为
(4)
式中:cj,k为第j个频段上分解的小波包系数;n为系数个数;t为时间。将第i层各频带内信号的能量元素构成一个特征向量:
T=[Ei,0,Ei,1,...,Ei,2i-1]。
(5)
最后根据推进器的定子电流信号提取的特征向量形式为T=[E5,1,E5,2,E5,3,…,E5,8]。
2 基于BP神经网络的推进器故障分类
BP(Back Propagation)神经网络是多层前馈神经网络,该网络的主要特点是前向传递,误差反向传递,在前向传递中,输入信号是从输入层经隐含层逐层处理,直至输出层[11-12]。每一层的神经元状态只影响下一层神经元状态,如果输出层得不到期望输出,则反向传播,根据预测误差调整网络权值和阈值,从而使BP神经网络预测输出不断逼近期望输出,所以可以利用BP神经网络来对推进器的状态进行预测。
2.1 神经网络结构设计
BP神经网络的结构一般包括输入层、隐含层、输出层以及传输函数。训练在样本较少的情况下,较少的隐含层就可以实现样本空间的超平面划分,所以本文采用包含一个隐含层的3层BP网络。
经过小波包分析提取的推进电机的定子电流特征向量为8个元素,所以神经网络的输入层神经元n为8;输出层包括3种故障状态和1种正常状态,所以输出层神经元数m为4;隐含层神经元数l与输入层神经元数、输出层神经元数有关,可以根据经验公式进行计算:
(6)
其中a为1~10之间的常数。
经过测试网络收敛的效果后,确定l=13。所以确定BP神经网络的结构为8-13-4。
BP网络的传输函数本文采用Softmax函数,能够直接计算出输入向量隶属于第z类故障类别的概率f(x),即
(7)
式中:k为输入向量维数;j=1,2,…,k。


图1 BP神经网络结构Fig.1 BP neural network structure
2.2 输出结果表示
对推进器的主要故障类型进行分类,首先将故障的类型分为4类:正常运行状态、推进电机短路故障、螺旋桨卡死故障和逆变器断路故障,用集合P={p1,p2,p3,p4}表示。在BP神经网络训练的过程中用4位二进制数表示,其对应的输出见表1。
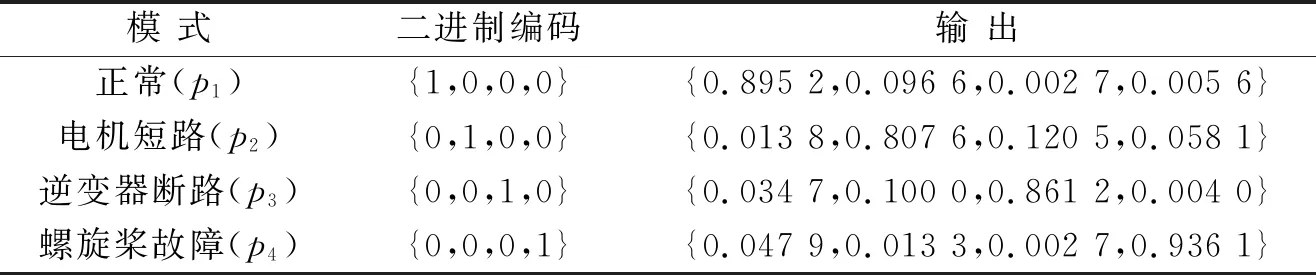
表1 输出向量Tab.1 Output vector
3 推进器健康度计算
输入信号经过小波包提取特征,再经过BP神经网络的分类后可以得到该信号隶属于4种状态的概率:
P={p1,p2,p3,p4}。
(8)
以上的内容是对推进器的主要故障在极端状态下的识别与分类,那么当这些极端状态发生的时候,推进器已经处于严重的故障状态,需要立即进行维修工作。
令m1=p1,m2=1-p2,m3=1-p3,m4=1-p4即可将四种类别的概率转换为健康的概率Pn,如下所示:
Pn={m1,m2,m3,m4}。
(9)
对4种类别的健康的概率进行求均值即可得到推进器状态的隶属度η:
(10)
当推进器的各个部件的状态下滑时,它的整体状态也会下滑,又不至于无法工作,这个时候推进器处于正常与严重故障之间的某一个状态,这个状态是由各个部件的状态共同决定的。划分推进器的状态区间见表2。

表2 状态区间Tab.2 Status interval
4 实验及分析
在Matlab/Simulink软件中进行推进器运动仿真建模,该模型采用速度闭环控制,速度环使用PI控制器,速度环的输出决定了母线电流,进而决定逆变器输出电压的大小,从而控制转速。以下对推进器进行正常运行和推进带电机B、C两相短路运行进行仿真,定子电流波形以及功率谱密度如图2~3所示。其他类型故障仿真实验同理。

图2 正常运行时定子电流时频图Fig.2 Time-frequency diagram of stator current during normal operation
图2(a)为推进器以1 000 rad·s-1的速度稳态运行时的时域电流信号,可以看到此信号是由正弦信号组成的。图2(b)为此信号的频域电流信号,可以看出频率主要分布在5,25,50,100 Hz左右,并且幅值在4.5,1.0,0.5,0.2 dB·Hz-1左右。
图3(a)为推进器以1 000 rad·s-1的速度稳态运行时,在0.1 s时,在仿真模型中加入A相短路时的时域电流信号,可以看到此信号是在正常信号的基础上增加了相当的负序电流组成的。图3(b)为此信号的频域电流信号,可看出频率主要分布在10,30,50,75 Hz左右,并且幅值在60,4,18,8 dB·Hz-1左右。相对于正常信号来看,增加了低频和高频的分量,频率的幅值增加。

图3 短路运行时定子电流时频图Fig.3 Time-frequency diagram of stator current during short-circuit operation
根据小波包原理对正常以及短路信号进行八层分解以及重构,前8个重构信号节点如图4所示。由图4可看出故障信号的小波包重构节点系数与正常信号的重构节点系数有明显差异,所以经过提取分解后的推进电机的能量能反映出该信号的故障特征。

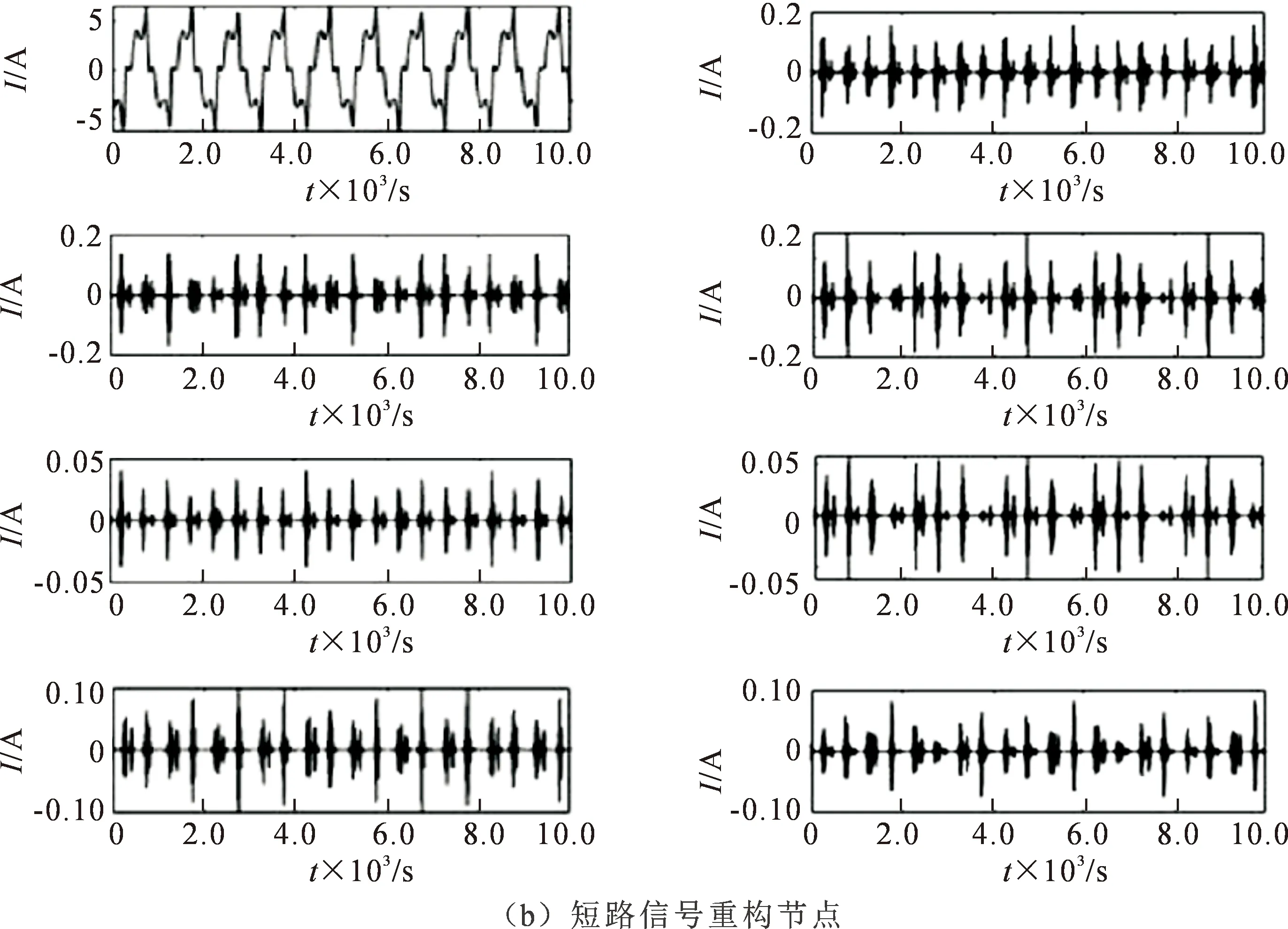
图4 小波包重构信号Fig.4 Wavelet packet reconstructed signal
利用小波包能量提取算法对重构信号的节点进行特征提取,信号长度为1 s,实验中每种模式采集100组数据。部分数据见表3,由表中的数据可以看出每种类型特征向量的元素都有区别,为了能准确的区分四种状态类别,选取8个元素作为特征向量。
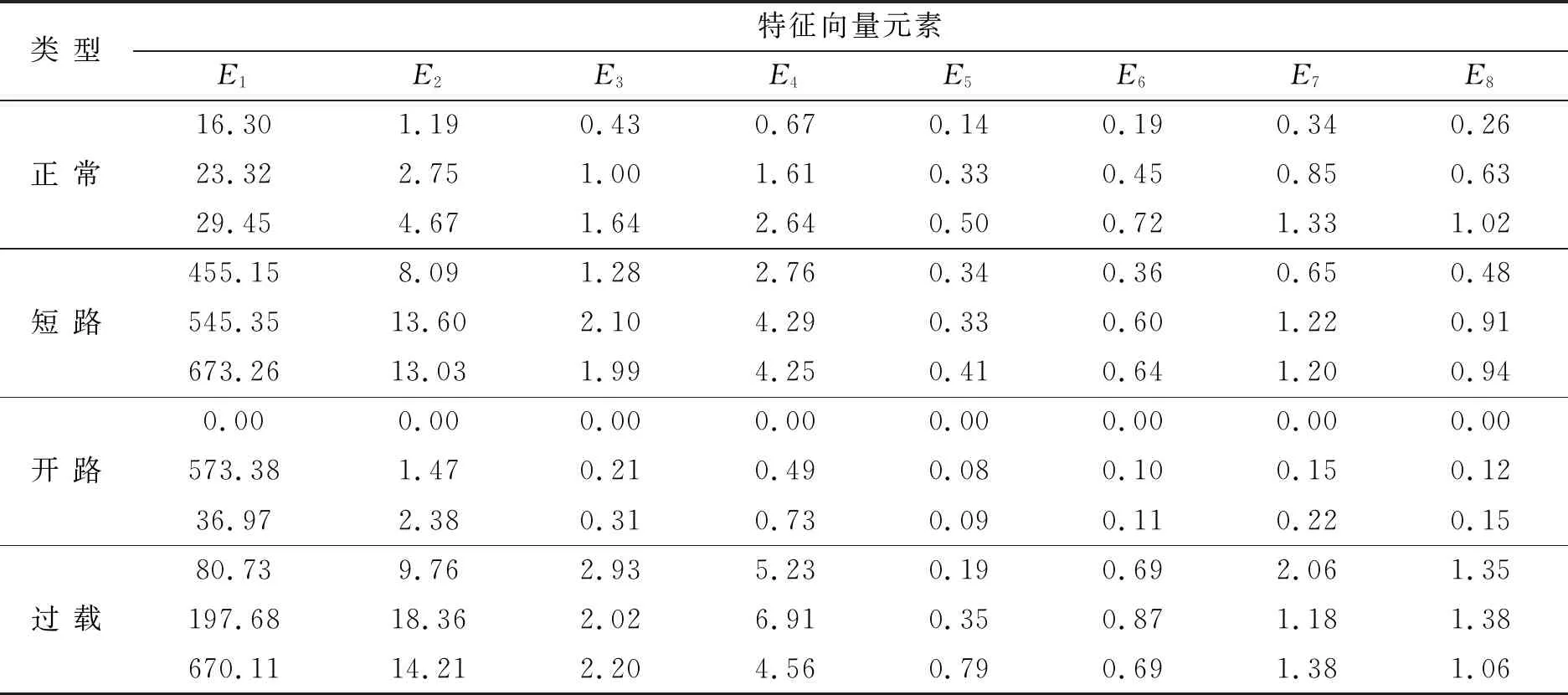
表3 特征向量元素Tab.3 Feature vectors element
将采集的400个样本分为300个训练样本和100个测试样本,每种类别75个训练样本,25个测试样本,设置迭代次数为200,误差率为0.01,学习速度为0.01进行仿真,误差曲线如图5所示,训练分类结果如图6所示。
从图5中可以看到分类模型在第17次迭代时已经达到了目标误差,表明所设计的网络模型能够满足分类要求。从图6训练结果图中可以看出120组样本中,有8个样本分类错误,其中黑点表示分类正确,圆圈表示分类错误;由训练后结果误差图中可以看出分类样本的数值误差比较大。可以多次训练模型,选择分类效果最好的网络模型。
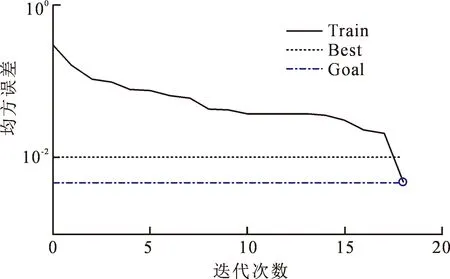
图5 误差曲线Fig.5 Error curve

图6 分类结果Fig.6 Classification results
分类准确率以及平均值见表4。

表4 分类准确率Tab.4 Classification accuracy
从表4可以看出,BP神经网络的分类效果良好,经过6次分类的平均准确率可以达到95.6%,这也证明了基于小波包的定子电流信号特征的提取效果也不错,依靠现有的样本量准确率并没有达到100%。
根据第3节的隶属度计算方法,利用四种类别的一个样本计算ROV推进器状态健康度,然后根据健康度可以判断推进器的健康状况。对120组测试数据进行计算,准确度达到100%,部分结果见表5。

表5 状态判别Tab.5 Status discrimination
ROV推进器状态健康度的正确性是以故障分类正确为前提的,相比文献[13]利用推力和舵角的变化情况来描述各自的状态,本文的方法不需要考虑ROV本体的姿态变化,并且经过BP网络分类后能精确的定位到推进器故障部件;而在分类精度方面,文献[14]提出将具有模糊输出的BP神经网络用于状态评估,该方法每一层的输出都具有模糊性,本文的优点是利用真实分类结果进行状态评估,没有模糊性。缺点是状态评估的结果比较依赖于分类的精度,神经网络的输出越接近于理想输出,评估的结果越准确,所以可以将提高分类精度作为进一步的研究。
5 结 论
1) 对故障仿真实验得到的定子电流进行5层小波包分解,并提取前8个节点的能量组成特征向量,能保证每种故障特征之间有更大的差异,有利于下一步的分类识别。
2) 利用BP神经网络对仿真实验得到的样本向量分类能得到良好的分类结果,实验结果表明,经过6次分类后的平均准确率达到95.6%,在分类正确的样本中进行健康度的计算后判断状态的准确率达到100%。
3) 分类结果的准确率并未达到100%,考虑是样本数量或者分类算法优化造成的,这对整体的状态判断也有一定影响,可以将算法优化作为下一步的研究方向。
猜你喜欢
时代汽车(2022年19期)2022-10-18
防爆电机(2022年4期)2022-08-17
防爆电机(2022年4期)2022-08-17
爆破(2021年2期)2021-06-24
舰船科学技术(2021年12期)2021-03-29
课堂内外(小学版)(2020年5期)2020-07-20
物理教学探讨(2018年10期)2018-12-27
当代陕西(2018年12期)2018-08-04
魅力中国(2016年52期)2017-09-01
科技创新导报(2016年31期)2017-03-30
