液压机械无级变速器速比自抗扰控制研究*
2021-04-14 10:31罗俊林苑士华李鑫勇
汽车工程 2021年3期
罗俊林,吴 维,苑士华,刘 辉,李鑫勇
(北京理工大学,车辆传动国家重点实验室,北京 100081)
前言
无级变速器是提高汽车燃油经济性和动力性能的有效方法[1-3]。液压机械无级变速器是静液传动和机械传动结合构成的无级变速器,综合了液压传动无级调速和齿轮传动效率高的优点[4],在拖拉机、轮式装载机、军用车辆等特种车辆上已得到应用[5-7]。对于装配液压机械变速器的车辆,通过调节速比,间接调整发动机的工作点,以提高车辆的燃油经济性或动力性。因此,速比跟踪控制性能对车辆的动力性和燃油经济性有重要影响。
国内外学者对液压机械无级变速器的速比跟踪控制方法进行了相关研究。文献[8]和文献[9]中采用最少拍系统原理设计速比跟踪控制算法,实现了较好的控制效果。文献[10]和文献[11]中采用模糊PID 控制方法对速比跟踪控制。由于液压机械无级变速器具有高度非线性特性,模糊PID 控制仍然存在速比跟踪控制效果自适应差等问题。为解决上述问题,文献[12]中提出变论域模糊PID 控制,但是模糊规则的制定较为复杂且需要凭经验。文献[13]中基于单神经元网络的神经PID 控制器,实现了速比无静差控制,但是动态性能不足。
液压机械无级变速器是高度非线性时变系统,其速比受到液压系统泵/马达效率的影响,而泵/马达效率受到油温、压力和排量等影响,效率变化范围较大,且难以精确建模,因此液压机械无级变速器的速比控制器必须具有较强的适应能力和抗干扰能力。文献[14]和文献[15]中将自抗扰控制算法应用于液压伺服系统的控制,证明自抗扰控制算法能够有效抑制干扰和未建模动态等不确定因素的影响,提高了控制性能。为提高液压机械无级变速器速比跟踪性能,本文中提出带前馈的自抗扰速比控制算法,并通过仿真和试验对控制算法的性能进行测试。
1 系统结构与数学模型
1.1 传动系统结构
单行星排液压机械无级变速器传动系统简图如图1 所示。传动系统主要由行星排、变量液压泵、液压马达、汇矩齿轮、发动机减速齿轮和主减速器组成。发动机动力经过减速器2 传输到行星架,液压泵4 与行星排太阳轮相连,齿圈输出动力与液压马达5输出动力由齿轮组6进行耦合,耦合后的动力再经过主减速器7和差速器8,最终传输到车轮以驱动车辆。通过调节液压泵的排量,就可以实现速比的连续调节。本结构方案中液压泵有较高的输入转速和较低的转矩,可以减小液压泵的压力要求。与纯液压传动系统相比,液压机械变速器可以利用机械路进行传输,因此具有更高的传动效率。
根据传动系统简图,设计了一种适用于全地形车辆的液压-机械无级变速器样机,原型车辆参数和传动系统参数如表1所示。变量液压泵的排量为0~37 mL/r,马达的排量为37 mL/r。由于液压泵的最大转速限制,发动机输出减速比为5.0,行星排的特征参数约为2.0,液压马达输出减速比为1.0。液压-机械无级变速原型车如图2所示。

图1 液压机械无级传动系统简图

表1 整车与传动系统主要参数

图2 原型样车
1.2 数学模型
1.2.1 发动机模型
发动机是非线性时变系统,其工作过程较为复杂,简单的数学公式很难精确表述发动机的工作性能。所以目前发动机的稳态模型主要采用试验数据查表的方法进行描述。
发动机的输出转矩是油门开度和发动机输出转速的函数,即

式中:α为油门开度;ne为发动机转速;Te为发动机转矩。
为能够更加精确地描述发动机的工作状态,还须考虑发动机惯量的影响,得到发动机的动态输出转矩为

式中:Ted为发动机的动态转矩;Je为发动机转动惯量。
1.2.2 液压泵模型
变量液压泵输出流量计算方程为

式中:εp为泵排量比,排量比定义为实际排量与其最大排量的比值(-1~1),正负代表排量调节方向;Vp,max为泵最大排量,mL/r;np为泵转速,r/min;ηpv为泵的容积效率;Qp,out为泵输出流量,L/min。
变量液压泵输入转矩计算方程为

式中:Δp为系统压力差,MPa;ηpm为泵的机械效率;Tp,in为液压泵输入转矩,N·m。
1.2.3 液压马达模型
液压马达进口流量计算公式为

式中:Vm,max为马达最大排量,mL/r;nm为马达转速,r/min;ηmv为马达的容积效率。
液压马达输出转矩计算公式为

式中:ηmm为马达机械效率;Tm,out为电机输出转矩,N·m。
1.2.4 整车纵向动力学模型
本文中仅考虑车辆的纵向动力学性能,车辆行驶力平衡方程为

式中:f为滚动阻力系数;α为地面的坡度角,(°);CD为空气阻力系数;A为迎风面积,m2;v为车速,km/h;δ为旋转质量增加系数;m为整车质量,kg;r为车轮半径,m;a为车辆加速度,m/s2。
2 速比自抗扰控制策略
2.1 自抗扰速比控制总体设计
在高精度伺服控制系统中,前馈控制可以提高系统的跟踪性能、控制速度和控制精度。因此,在液压机械无级变速器速比控制过程中,通过采用基于前馈补偿的自抗扰控制ADRC 方法来实现速比的有效控制。控制系统框图如图3 所示。控制系统主要包括前馈控制量计算模块、ADRC 控制模块、排量比计算模块和斜盘转角计算模块。前馈计算模块根据目标速比,通过理论计算得到前馈控制量u0、ADRC控制器根据目标速比id和实际速比ia计算修正控制量Δu,然后对两者求和,得到泵的目标排量,后续模块将目标排量转换为排量比和斜盘目标转角。最终通过步进电机实现泵排量的控制。
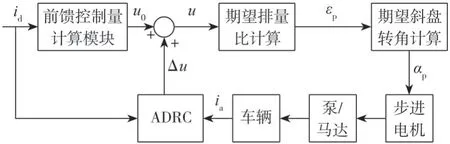
图3 速比控制框图
2.2 理论转速关系分析
在闭式液压泵-马达工作系统中,液压泵-马达存在流量平衡关系,从液压泵输出的液压油流量与输入到液压马达进油口的液压油流量相等:

根据式(8)可以推导出液压泵与液压马达的转速关系式为

根据传动系统原理简图,发动机输出转速经一级减速与行星排的行星架相连,行星排机构的太阳轮与液压泵相连,行星排的齿圈同时与液压马达和减速器相连,得到转速关系表达式,即

式中:nt为太阳轮转速;nq为齿圈转速;nj为行星架转速;ne为发动机转速;im为液压马达输出减速比;iq为发动机输出减速比。
行星机构中,太阳轮、行星架、齿圈是通过行星轮联系起来的,存在如下的转速关系式,即

将式(9)和式(10)中的转速关系代入式(11),可以得到行星排齿圈和太阳轮的转速与发动机转速和液压泵-马达系统各参数的关系式:

式中k为行星排特性参数。
行星排齿圈转速与行星架转速的关系为

2.3 前馈控制量计算
对于液压机械无级变速器,根据目标速比对变量泵的排量进行调节,从而实现无级调速。假设速比i定义为行星架转速与齿圈转速之比,即

假设目标速比为id,由式(14)可以求出液压泵/马达的理论目标排量之比,即

由于本传动系统的液压马达为定量马达,因此马达排量比εm=1,进而得到液压变量泵的期望排量:

由式(17)可知,液压泵的理论排量比与液压泵/马达的容积效率有关,在实际系统中,液压泵/马达的容积效率受到油液温度、泵排量、转速、系统压力等影响,是难以精确获取的,因此按照式(17)得到的目标排量比进行速比控制是不够精确的。虽然根据式(17)不能得到准确的目标排量比,但可以作为控制器的前馈参考量。
2.4 自抗扰反馈控制
自抗扰控制(ADRC)技术是继承经典PID控制理论的基础上,结合现代控制理论逐步构建而成。相比于经典PID控制,ADRC设计了跟踪-微分器,能够事先安排过渡过程,从而使其整定更容易且鲁棒性更好,同时可以提取目标信号及其微分信号的跟踪信号;设计了扩张状态观测器,实现总扰动的估计和补偿,进行实时观测并加以补偿;利用非线性状态误差反馈控制律将误差、误差微分、误差积分3 种信号组合起来,易于实现且具有良好的鲁棒性和适应性[16]。
ADRC 主 要 由 跟 踪- 微 分 器(tracking differentiator,TD)、扩张状态观测器(extended state observer,ESO)和非线性状态误差反馈控制律(nonlinear state error feedback,NLSEF)组成,其基本结构如图4所示。
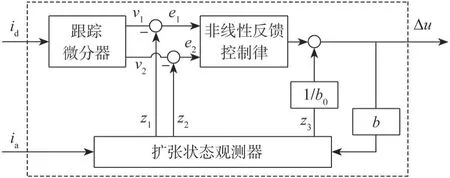
图4 ADRC基本结构
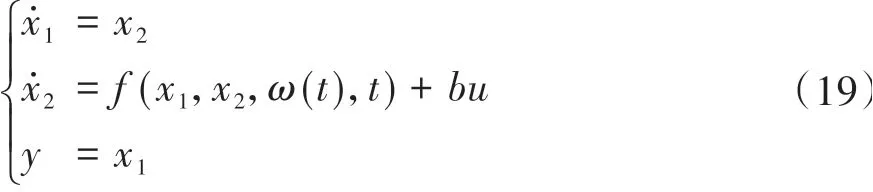
对于液压无级变速器的ADRC 速比控制,目标信号为目标速比id,反馈信号为实际速比ia,控制信号为液压泵的排量比εp。假设有2 阶系统,系统状态量y为ia,控制u为εp,则有

式中:ω(t)为外扰作用;f(y,y˙,ω(t),t)为综合了外扰和内扰的总扰动。选取状态变量:x1=y,x2=y˙,则可将其转化为状态方程:

扩张状态观测器主要用于总扰动的观测,将总扰动扩张成系统的一个新状态变量,然后利用系统的输入/输出观测出包含系统原有状态变量和扰动的所有状态。对于式(18)所示的2 阶系统,将外扰作用的表现量当作一个新的未知状态变量:

并将其加入到原2阶系统中:

对此2阶系统建立离散非线性状态观测器:
式中fal(ε,a,δ)为非线性函数:
跟踪-微分器的输入v为目标信号即目标速比id,输出信号v1为目标信号的跟踪信号,v2为目标信号v1的微分。离散微分跟踪器为

式中:h为采样时间;h0为跟踪微分器的滤波因子;r0为速度因子,用于调整过渡过程的快慢;v(k)为k时刻期望值;fh为快速最优控制综合函数。fh表示为

ADRC可以采用下式实现非线性组合:

式中:c为阻尼因子;h1为精度因子。
由于通过扩张状态观测器,原控制对象中扩张出的扰动状态变量x3被扩张状态观测器的z3跟踪,将估计的扰动加入控制量,以消除扰动的影响,因此可以得到ADRC的最终控制量:

在整个控制模型系统中,r0由过渡过程快慢的需求和系统的承受能力决定;h0为采样周期h的整数倍。整个控制系统需要调整的参数为控制量增益r、阻尼因子c、精度因子h1和补偿因子b0,β01、β02、β03由系统采样步长决定:

3 结果讨论
图5 为液压机械传动系统速比仿真与试验曲线。通过数据采集系统获得驱动系统的实际速比。从图5 可以看出,所建立的液压机械无级传动系统仿真模型能够很好地反映实际车辆的运行状态。
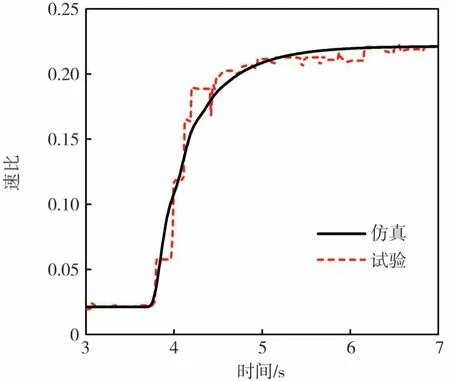
图5 传动系统速比阶跃仿真与试验曲线
图6 为不同控制方式下的阶跃速比仿真曲线。在仿真过程中,控制发动机使其工作在恒定转速下,令目标速比在第10 s时从0.25阶跃上升至0.4,然后维持目标速比稳定,分别通过经典PID 控制器和ADRC 控制器对液压机械无级传动系统的液压变量泵进行控制。由图6可以看出,经典PID控制几乎没有延迟,且在前期响应速度较快,在10.56 s时就可达到目标速度,但存在超调,超调量为13%,达到稳态的时间也较长,为3.75 s。ADRC 控制经过0.01 s的延迟后开始跟踪目标速比,虽然前期响应速度略慢于经典PID控制,但是第一次达到目标速比0.4的时间略快于经典PID,且ADRC 控制超调量很小,仅为2.33%,比PID 控制降低了10.67%。ADRC 控制达到稳态的时间也较快,仅为2 s,比经典PID控制缩短了46.67%。结果证明:ADRC 算法中安排的过渡过程能够减小超调量,而ADRC非线性误差反馈律的设计具有比PID误差线性组合更高的控制效率。
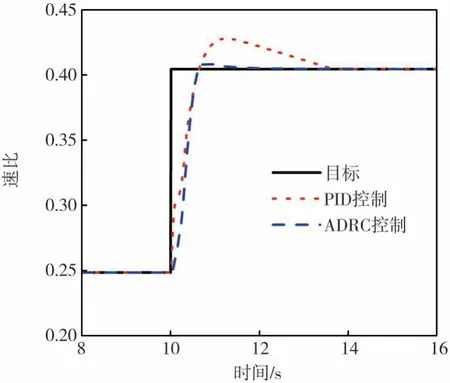
图6 传动系统阶跃速比仿真
图7为传动系统正弦速比跟踪仿真曲线。正弦速比跟踪的经典PID控制和ADRC控制参数均为调节好的最佳阶跃响应特性参数值。在仿真过程中,控制发动机使其工作在恒定转速下,令目标速比在0.25 与0.4之间以频率为0.5 rad/s的正弦信号形式变化。由图7可以看出,经典PID 控制与ADRC 控制在速比缓慢跟踪过程中存在较小的跟踪误差,两者的性能基本接近。但是在速比由减到增,或由增到减的换向过程中,ADRC控制的跟踪误差明显较小,这表明ADRC适应能力强,具有更好的速比跟踪效果。

图7 传动系统正弦速比跟踪仿真
在实际控制系统中,液压机械无级传动系统受到诸多因素影响,比如液压泵的排量、转速、油温和液压系统压力会影响到液压传动系统的效率,参数变化之间还会相互影响,且难以精确建模。例如,实际的发动机转速都存在一定的波动,且发动机转速变化会引起系统压力、泵排量等变化,从而系统效率也会发生变化。假设目标速比恒定为0.405,在25 s时将发动机转速加入一个正弦波动信号,幅值为100 r/min,频率为1 rad/s,比较两种控制方法的速比稳定性,两种控制方法均采用前面调整好的参数,仿真结果如图8所示。
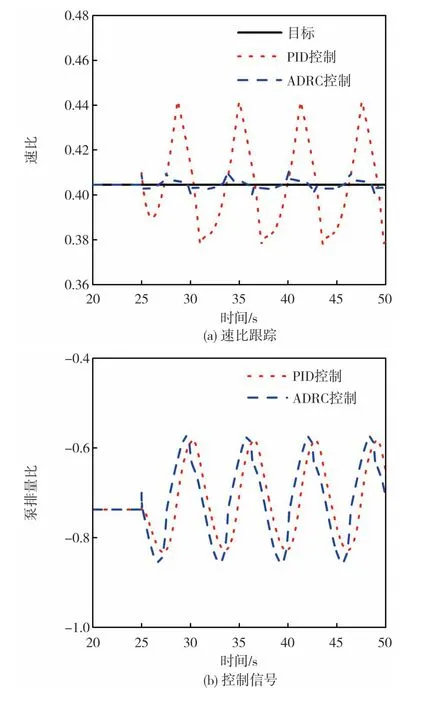
图8 发动机转速波动下速比跟踪控制仿真
图8(a)为发动机转速变化时,PID控制和ADRC控制下实际速比跟踪目标速比的结果。可以看出,PID 控制时速比变化范围为0.38~0.44,变化幅值为0.06,而ADRC 控制下速比变化范围为0.40~0.41,变化幅值为0.01,速比变化幅值降低了83.33%。图8(b)为两种控制方法下输出的控制信号。可以看出,ADRC 控制信号比PID 控制信号提前,说明ADRC 控制方法在抵抗干扰时反应更加迅速,这是由于ADRC 对扰动进行实时估计,并在控制信号中加以补偿的效果。从控制信号的幅值来看,ADRC控制信号范围为-0.853~-0.573,PID 控制信号范围为-0.854~-0.585,ADRC 控制信号幅值比PID 控制信号幅值仅大4.09%,这证明在相差不大的控制量输出时,ADRC 的控制效果比PID 控制有很大的提高。
图9为PID 控制和ADRC 实车的速比测试结果。图9(a)为PID 控制试验结果。可以看出,PID 控制下,在速比上升阶段,速比有较大的跟踪误差,且具有明显的迟滞现象,而在速比下降阶段,跟踪误差较小。图9(b)为ADRC 控制试验结果,其速比动态跟踪性能更好,响应更快,误差更小,但ADRC 控制出现了较小的超调。试验结果表明,采用自抗扰控制的速比控制方法可以提高速比动态跟踪性能,减小稳态误差,具有较好的适应性。

图9 速比跟踪试验
4 结论
本文中研究了一种单行星排的液压-机械无级变速器的速比控制问题,提出了带前馈的自抗扰速比控制算法。仿真与试验结果表明:
(1)通过液压机械无级变速器的仿真模型和样车试验,验证了自抗扰算法用于液压机械无级变速器速比控制的可行性和有效性;
(2)液压机械无级变速器的速比控制采用带前馈补偿的自抗扰控制,可以降低液压-机械无级变速的速比误差,具有良好的适应性和抗干扰性能。
所得结果可用于液压机械无级变速器控制器的优化设计。由于液体静压传动受到许多复杂因素的影响,控制方法还需要更多的研究。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
青少年科技博览(中学版)(2022年1期)2022-03-28
中国军转民(2021年11期)2021-12-13
机电工程技术(2021年3期)2021-09-10
科技风(2018年6期)2018-10-21
大经贸(2017年8期)2017-09-26
科学与财富(2016年27期)2017-03-24
发明与创新·大科技(2016年10期)2016-10-22
汽车观察(2009年6期)2009-12-07