
基于硬件在环的泊车控制器仿真测试
2021-04-21 14:15宋绍文罗传东姜家如
汽车实用技术 2021年7期
宋绍文,罗传东,姜家如
基于硬件在环的泊车控制器仿真测试
宋绍文,罗传东,姜家如
(安徽江淮汽车集团股份有限公司技术中心,安徽 合肥 230601)
文章论述了一种基于硬件在环的泊车控制器测试系统的方案原理、构成以及测试过程。为了使用硬件在环测试系统验证泊车控制器功能,需要完成超声波探头激励测试、泊车控制器探测距离测试、泊车控制器功能测试。最终硬件在环的泊车控制器测试系统通过场景仿真软件对交通场景进行视觉模拟。同时,超声波板卡对模拟交通场景中目标信息进行超声波仿真模拟,并将以上信息提供给泊车控制器进行决策运算,完成泊车控制器功能的仿真测试。
硬件在环;泊车控制器;仿真测试
前言
泊车控制器是智能驾驶系统的重要组成之一。它可以根据超声波雷达侦测的障碍物距离信息以,计算泊车轨迹,自动控制转向系统、制动系统、引擎系统、传动系统完成自主泊车。
随着智能驾驶产品的不断开发迭代。智能驾驶产品的开发过程逐渐从以硬件为主导向着以数据为主导演变。传统的场地测试、单一场景的实车测试难以满足智能驾驶对极限危险工况、复杂场景的需求。
硬件在环测试则具有迭代开发、重复性好、场景丰富多样的优点。硬件在环泊车控制器测试系统通过场景仿真软件对视觉交通场景进行模拟。该测试系统有助于在产品开发过程中及时发现设计缺陷和潜在问题,并指导实车测试,进一步提高产品的安全性和可靠性,缩短开发周期[1]。
1 系统方案
硬件在环泊车控制器测试系统方案为:通过场景仿真软件为泊车控制器模拟各种泊车环境;泊车环境中不同距离障碍物的信息,由超声波仿真板卡模拟实现。
系统主要有上位机、实时处理器、超声波暗室、泊车控制器构成。系统各部分作用如下:
上位机:提供测试所需的虚拟道路、交通场景以及虚拟传感器信号。
实时处理器:进行实时信息处理。
超声波暗室:将实时处理器中仿真的障碍物信号通过仿真探头转换成真实探头可以识别的超声波信号。
2 雷达探头测试
2.1 探头调试
系统上电后,在虚拟场景中没有障碍物的情况下。先通过CANoe监测泊车控制器障碍物距离报文。
若报文中障碍物距离为0,则探头集成没有问题;如果个别探头检测到障碍物距离不为0,则需要进行调整,直至障碍物距离为0。图1所示报文信息显示障碍物距离全为0,代表探头间没有相互干扰。
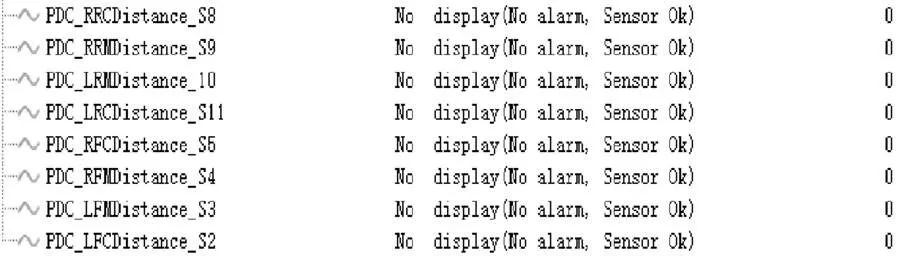
图1 障碍物距离信息
2.2 探头模拟距离测试
通过CANoe给泊车控制器回放实车报文,激活泊车控制器功能。配置超声波探头的回波时间,模拟不同的障碍物距离信息。对比泊车控制器报文信息中识别距离与模拟距离的误差大小,并适当标定回波时间,从而将模拟的距离与泊车控制器识别距离进行标定。
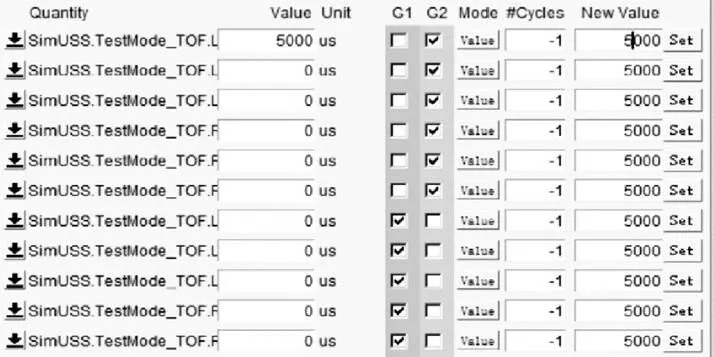
图2 回波探头的回波时间设置
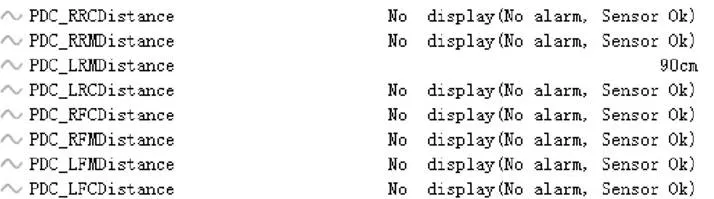
图3 泊车控制器识别距离信息
回波测试时间需要保证在1分钟以上,确保在这段时间内泊车控制器识别的距离稳定没有波动。对每个探头进行逐一测试后,对所有探头进行联调测试,排除互相干扰。图2所示探头回波时间具体设置,图3为泊车控制器报文信息中识别到障碍物的距离信息。
虚拟场景中的障碍物距离,按照计算公式s =v* t/2转换为飞行时间参数后,输入超声波仿真板卡从而进行回波模拟。运行硬件在环工程,进一步测试虚拟场景中的障碍物距离和泊车控制器反馈的距离是否与实车一致,根据测试结果进行一定的补偿。
对于此误差通过飞行时间补偿和修改模型中雷达探头FOV的方法进行补偿,补偿算法代码如图4所示。雷达探头的FOV设置如图5所示。

图4 补偿代码
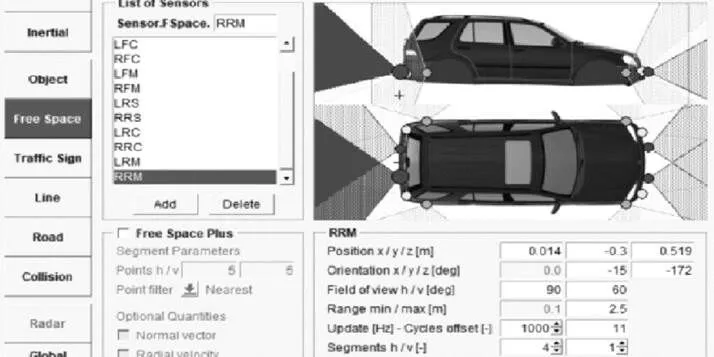
图5 FOV设置
完成以上参数设置后,确认场景中障碍物的距离与泊车控制器识别一致后便可进行硬件在环测试。
3 硬件在环测试
3.1 水平泊车测试
在场景仿真软件中按照功能规范和测试要求,搭建泊车控制器硬件在环水平泊车测试用例。按下泊车控制器功能开关,激活泊车控制器泊车功能,开始进行硬件在环自动化测试。车辆在虚拟场景中会按照开始设定预先设定的测试用例,逐条进行水平泊车功能测试。
测试中,当泊车控制器搜索到车位后,泊车控制器会根据虚拟环境环境信息,提示找到车位并缓慢行驶,并控制虚拟车辆模型完成,进而实现半自动泊车测试。图6为水平泊车测试情况。

图6 水平泊车
3.2 垂直泊车测试
同水平泊车测试类似,垂直泊车测试前先在场景仿真软件中按照功能规范和测试要求,搭建泊车控制器硬件在环垂直泊车测试用例。然后激活泊车控制器泊车功能,开始进行硬件在环自动化测试。系统会自动记录测试结果并输出测试报告。图7为垂直泊车测试情况。

图7 垂直泊车
4 结论
泊车控制器硬件在环测试,可实现泊车控制器功能策略、故障诊断、网络系统等测试。该测试系统成功开发,可以在整车控制器的开发过程中得到应用,提高了测试效率,降低了测试成本[2]。
[1] 崔海峰,刘拥军,赵向东,王强.基于硬件在环仿真的汽车制动控制器测试系统[J].上海汽车,2010,000(008):14-17.
[2] 夏锌.基于硬件在环的电动汽车整车控制器功能测试方法研究[D].天津:天津大学,2013.
Simulation Test Of Parking Controller Based On Hardware In The Loop
Song Shaowen, Luo Chuandong, Jiang Jiaru
( Technology Center of Anhui Jianghuai Automobile Group Co., Ltd., Anhui Hefei 230601 )
The article discusses the principle, composition and test process of a parking controller test system based on hardware in the loop. In order to use the hardware-in-the-loop test system to verify the function of the parking controller, it is necessary to complete the ultrasonic probe excitation test, the detection distance test of the parking controller, and the function test of the parking controller. Finally, the hardware-in-the-loop parking controller test system visually simulates the traffic scene through scene simulation software. At the same time, the ultrasonic board performs ultrasonic simulation simulation on the target information in the simulated traffic scene, and provides the above information to the parking controller for decision-making calculation, and completes the simulation test of the parking controller function.
Hardware in the loop; Panoramic parking controller; Simulation test
10.16638/j.cnki.1671-7988.2021.07.009
U471
A
1671-7988(2021)07-25-03
U471
A
1671-7988(2021)07-25-03
宋绍文,智能网联工程师,就职于安徽江淮汽车集团股份有限公司技术中心。
猜你喜欢
汽车电器(2022年9期)2022-11-07
汽车实用技术(2022年19期)2022-10-19
电子技术与软件工程(2022年11期)2022-09-09
汽车实用技术(2022年7期)2022-04-20
软件导刊(2022年3期)2022-03-25
科学家(2021年24期)2021-04-25
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
小猕猴智力画刊(2019年8期)2019-09-12
好孩子画报(2019年10期)2019-01-10
