网格布断裂缺陷检测方法的研究
2021-04-30 08:25方利华郤志星房昭辉伏燕军
机械设计与制造 2021年4期
方利华,郤志星,房昭辉,伏燕军
(南昌航空大学无损检测教育部重点实验室,江西 南昌 330000)
1 引言
网格布是手机生产中一个基础且重要的部件,主要起到保护听筒的作用。在网格布的制造中,常会因为生产工艺或其他因素导致网格断裂现象的发生,这会使得灰尘和其他杂质进入听筒内部,造成语音通话故障,影响客户体验,因此各大生产厂商都十分重视该产品的质量。目前,大多数厂家都使用人工检测的方式对网格布表面缺陷进行识别,但这种方法速度慢,误判率高,而网格布面积小,结构复杂的特点,使得传统的自动化检测方法并不适用,因此提出一种基于机器视觉的网格布断裂缺陷检测方法具有重要意义。机器视觉是一门包含了计算机技术,光学工程等一系列相关学科在内的综合性技术,它主要是借助多媒体设备采集得到待测物体的图像,通过图像处理获得被测工件对象的各种可描述参数,并利用这些参数完成目标物体的识别,测量,或检测。
对于一些高危环境或者人工不能满足需求的场合下,机器视觉技术发挥着重要的作用[1]。随着硬件设备的普及,理论知识的发展,机器视觉在表面缺陷检测领域得到了广泛应用。西安理工大学利用Kirsch 和Canny 算子对陶瓷碗表面的缺陷进行了检测[2]。文献[3]采用基于SVM 分类器的方式实现了对啤酒瓶口缺陷的检测。文献[4]利用机器视觉技术实现了光栅表面缺陷的检测。基于机器视觉技术,以网格布为研究对象,提出了一种网格断裂缺陷的检测方法。针对网格断裂的程度,将其分为完全断裂和部分断裂两类,并分别完成了算法设计。实验结果表明,提出的方法,正检率为97%,可以满足实际的检测需要,有利于企业降低成本。
2 图像采集系统设计
机器视觉技术主要包括图像获取,图像处理和外部通讯三个单元[5]。图像获取是指通过多媒体设备获取待测物体的高对比度图像的过程,图像质量的高低,直接影响到整个视觉系统的成败。图像处理主要是对采集到的图像进行算法设计,生成各种可描述的参数。外部通讯主要是完成数据的交互。常见的机器视觉系统示意图,如图1 所示。

图1 机器视觉系统示意图Fig.1 System Diagram of Machine Vision
为了保证检测结果的统一性和准确度,在这里图像采集设备采用海康威视MV-CA003-20GC 千兆网工业相机。为了减少因镜头畸变所带来的误差,选择Edmund 公司的金系列远心镜头。基于待测物体的特点,照明系统采用背部打光的方式,突出网格结构,弱化背景。
3 图像处理算法设计
通过多媒体设备采集图像只是整个系统中的第一步,要实现网格布断裂缺陷的精确识别,还需要通过必要的算法设计,提取出可描述参数。检测流程图,如图2 所示。主要包括图像滤波,阈值分割,Blob 分析,凸包检测,骨架提取,缺陷识别几个步骤。网格布的两种主要缺陷,如图3 所示。

图2 检测流程图Fig.2 Flow Diagram of Detection

图3 缺陷类型Fig.3 Defect Types
3.1 图像滤波
在对待测物体进行图像采集时,常会因周围环境的干扰而引入噪声,影响图像质量,因此有必要对采集到的原始图像进行滤波操作。频率域滤波和空间域滤波是图像滤波中的两种主要手段。频率域滤波需要将图像转换到频域空间,计算较为复杂,而空间域滤波不需要对图像进行空间的转换,只是借助于某一大小的模板,处理其内部像素,计算量小,实现简单,在图像处理领域应用更为广泛。均值滤波[6]和中值滤波[7]是常用的两种空间域滤波算法。其中,均值滤波是计算窗口内所有像素点的平均值,方法简单,但容易丢失边缘,计算公式为:

式中:f(i,j)—原始像素点的灰度值;
g(i,j)—均值滤波后像素点的灰度值;
m—窗口内像素点的数量。
不同于均值滤波,中值滤波是一种非线性滤波器,实现方式是使用某一大小的领域窗口遍历图像,排序窗口内像素点的灰度值,将中间灰度值赋予目标点,尤其适用于椒盐噪声。在本实验中,采用3*3 的滤波模板对采集到的网格布原始图像进行中值滤波操作。
3.2 阈值分割
一副图像可以分为目标和背景两个部分,而阈值分割是最常用的一种分割手段。它是将图像中的每个像素点与一给定的阈值进行比较,小于该值的点记为一类,而不小于该值得点记为另一类,计算公式为:

式中:f(i,j)—原始像素点的灰度值;g(i,j)—阈值分割后像素点的灰度值;T—选取的阈值;b0—小于阈值时设定的灰度值;b1—不小于阈值时设定的灰度值。
Otsu 最大类间方差法[8]是一种自适应的阈值分割算法,它的基本思想是如果选择的阈值,使得目标和背景方差最大,则该阈值为最合适阈值。
3.3 Blob 分析
通过阈值分割,只是得到了具有相同属性的一块区域,为了对网格布缺陷进行精确识别,还需要通过Blob 分析将其分为多个独立区域,主要包括连通域标记和特征提取两个步骤[9]。
图像的连通域是指具有同一像素值并且像素点位置关系符合某种规则的区域,通常使用的是4-邻域和8-邻域[10]。采用8-邻域的方法对阈值分割后的图像进行处理。处理后的图像,某些连通区域并不满足缺陷特征,还需要通过特征提取的方式进一步优化。其中,网格的面积是一个很好的参数,通过将其与高低阈值进行比较,可以很容易筛选出目标区域。
3.4 凸包检测
对于二维的图像,凸包就是将最外层的点连接起来构成凸多边形,它能包含点集中所有的点[11]。通过对上面分割出来的连通区域进行凸包检测,可以得到包括不同内容的凸包区域。合格产品,内部元素统一,如图4(a)所示。当网格部分断裂时,网格会出现在凸包内部,如图4(b)所示。因此,对连通区域进行凸包检测,判断其内部是否包含有网格,就可以实现网格部分断裂缺陷的检测。

图4 网格部分断裂缺陷检测Fig.4 Detection of Grid Partial Fracture Defect
3.5 骨架提取
骨架是模型几何形态的一种重要拓扑描述,是一种重要的几何特征,它是所有中心点元素(骨架子集)组成的集合[12]。通过对网格进行骨架提取操作,可以突出它的结构信息,便于提取网格之间的交点(区域)。经过处理后的网格骨架图,如图5(a)所示。网格骨架之间的交点,如图5(b)所示。
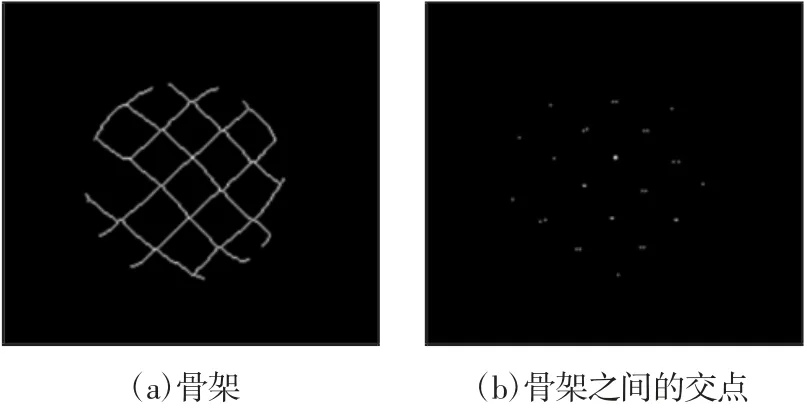
图5 骨架提取Fig.5 Skeleton Extraction
由图5(b)可知,通过图像处理得到的骨架交点存在冗余,还需要通过算法设计去掉其中距离相近的点。记其中的一个交点为A(x1,y1),另一交点为B(x2,y2),当两个交点的距离d小于阈值δ时,可认为两个交点相近,需舍弃其中一个。

式中:d—两交点的距离;(x1,y1)—交点A的坐标;(x2,y2)—交点B的坐标。
网格完全断裂缺陷检测,如图6 所示。

图6 网格完全断裂缺陷检测Fig.6 Defect Detection of Grid Complete Fracture
对于合格产品而言,以骨架交点所生成的圆形区域内,包含有4 个独立的连通区域。而完全断裂的网格,因其结构的不完整,导致圆形区域内,只会包含有3 个独立的连通区域。因此,通过连通域的数目,就可以识别网格是否完全断裂。

式中:(x,y)—像素坐标;C(x,y)—圆形区域内连通域的集合;N—独立的连通区域数目。当N=4 时,为合格。当N=3 时,为不合格。
3.6 缺陷识别
这里的缺陷包括网格部分断裂和完全断裂两类,对于某一待测网格,当其满足上述两种缺陷的一种时,即可判定其为不合格产品,这里缺陷识别流程,如图7 所示。
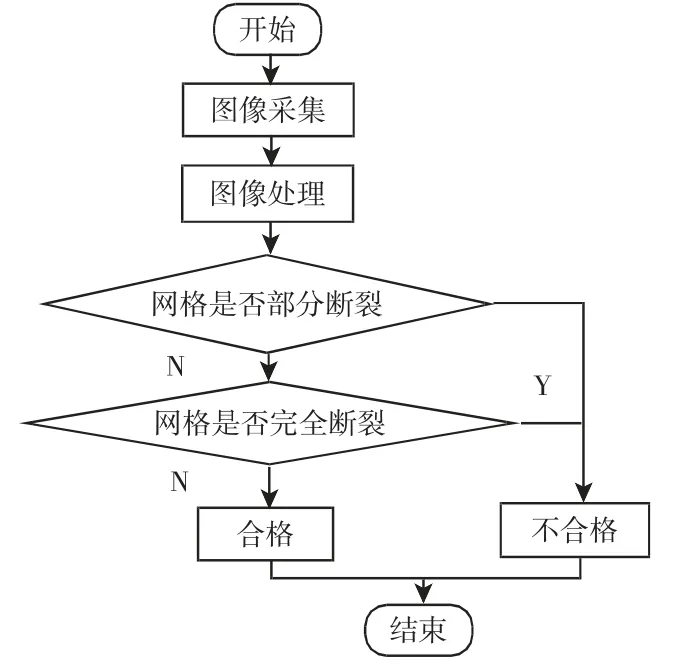
图7 缺陷识别示意图Fig.7 Diagrammatic Sketch of Defect Recognition
4 实验与分析
4.1 实验环境
系统采用研华工控机,CPU 型号为Inter I5-6300 处理器。图像采集设备选用海康威视MV-CA003-20GC 千兆网工业相机,分辨率为(672×512)pixel,镜头选择Edmund 公司金系列远心镜头。照明系统采用(110×110)mm 平行背光源。选取合格和未合格产品共100 个进行试验,采用Halcon 视觉工具包进行编程。
4.2 结果与分析
检测结果,如表1 所示。通过对其分析可以发现,提出的网格断裂缺陷检测方法的正检率为97%,可以满足实际的检测需要。其中,网格部分断裂的正检率为94%,网格完全断裂的正检率为93%。
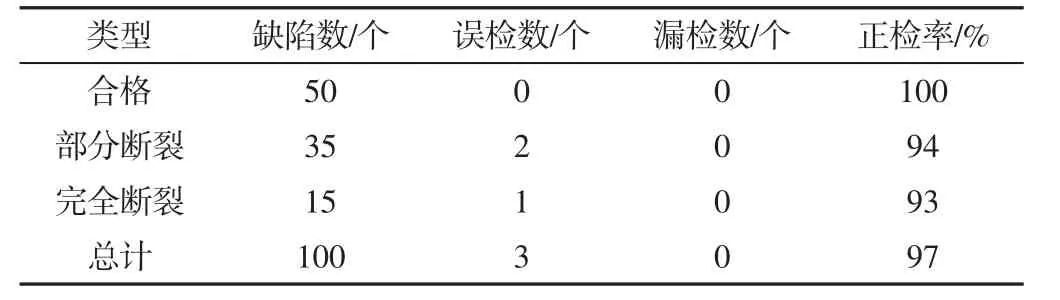
表1 检测结果Tab.1 Test Results
只是对网格布的二维图像进行了处理,其立体边缘部分并没有考虑,这是下一步工作的主要内容。
5 结论
以网格布为研究对象,借助于机器视觉技术实现了网格完全断裂和网格部分断裂两种缺陷的识别。实验检测结果表明,提出的网格断裂缺陷检测方法的正检率为97%,可以满足实际的检测需要,有利于企业降低成本。
猜你喜欢
浙江工业大学学报(2022年6期)2022-11-29
橡塑技术与装备(2021年23期)2021-12-13
现代电子技术(2021年1期)2021-01-17
学生导报·东方少年(2019年7期)2019-06-11
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
数学学习与研究(2017年11期)2017-06-20
自动化学报(2017年11期)2017-04-04
青年时代(2017年3期)2017-02-17
理科考试研究·高中(2014年3期)2014-04-10