不确定性双臂空间机器人自适应模糊优化控制
2021-04-30 08:27陈花卫
机械设计与制造 2021年4期
陈花卫
(铜仁学院大数据学院,贵州 铜仁 554300)
1 引言
自由漂浮双臂空间机器人(Dual-ArmFreeFloatingSpaceRobot,DFFSR),是由一个本体基座及搭载其上的双机械臂组成,在太空中忽略微弱重力环境且不受外力控制而处于自由漂浮状态的机器人系统,因其无需消耗多余燃料、且多机械臂系统具备更好的稳定性,在代替宇航员完成目标抓取、卫星修复、空间站建设等在轨服务任务,较姿态或位置受控、单臂空间机器人系统,具有独特的优势,得到了更为广泛的关注和研究[1-4]。
DFFSR 由于处于失重状态,其机械臂的运动与基座的运动相互影响,即存在强动力学耦合关系,使得可用于一般机械臂系统的控制方法失效,研究其运动控制问题也因此具有十分重要的意义。文献[5-7]分别采用传统非线性反馈控制、变结构滑模控制以及PID 控制方法,实现对DFFSR 关节空间的轨迹跟踪控制,但均需获得系统精准惯性参数,然而空间环境往往存在燃料消耗、外界扰动等诸多不确定因素,会对控制精度产生影响。文献[8]针对不确定性问题,提出了一种基于遗传算法的补偿学习控制方法,实现了机械臂关节空间的轨迹跟踪控制;文献[9]基于增广法提出了一种改进鲁棒控制方法,能够有效解决不确定性DFFSR 的关节运动控制问题;文献[10]考虑DFFSR 系统关节执行器故障的不确定性因素,设计了一种分散容错控制器,实现了关节角高精度运动跟踪控制,但上述文献均未考虑到系统关节力矩输出能量优化问题。
针对上述不足,基于系统动量守恒关系及Lagrange 方法,建立DFFSR 系统关节空间的动力学方程;而后,考虑系统惯性参数未知导致惯性矩阵无法求解问题,利用模糊控制理论的万能逼近特性,通过在线参数辨识建立系统自适应模糊模型;基于此,同时考虑系统存在外界扰动以及输出力矩的优化问题,利用SDRE 优化控制理论,设计一种自适应模糊优化控制方法,实现了DFFSR系统关节空间的轨迹跟踪。
2 DFFSR 系统建模
2.1 DFFSR 系统动力学方程
以做平面运动的二连杆DFFSR 系统为研究对象,如图1 所示。
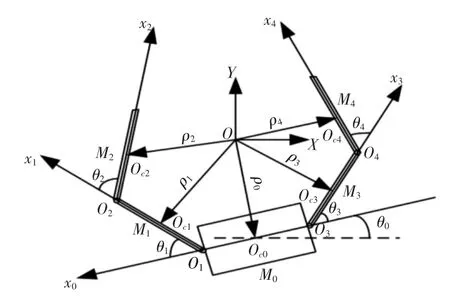
图1 DFFSR 系统Fig.1 Dual-Arm Free Floating Space Robot Syste m
其由一个基座M0及四个机械臂M1、M2、M3、M4组成,忽略太空环境中的微弱重力梯度,根据动力守恒定理和Lagrange 第二类方程,可推出姿态受控双臂空间机器人动力学模型、运动学模型以及姿态角与关节角的雅克比关系分别为[11]:
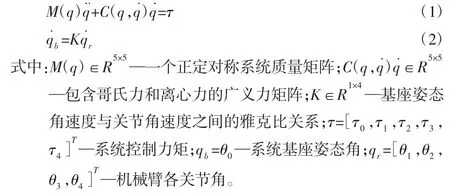
考虑系统自由漂浮状态下基座位置和姿态均不受控情况,对双臂空间机器人动力学、运动学模型结构进行分解可得:

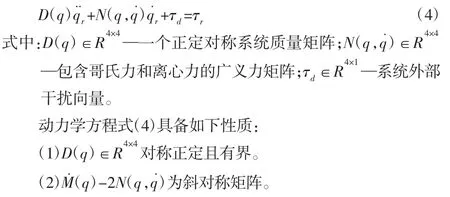
根据式(3),同时考虑存在外界扰动,可进一步推导出DFFSR系统动力学方程为:
2.2 DFFSR 系统模糊建模
定义模糊系统输出函数形式如下[12]:

3 控制器设计
3.1 SDRE 优化控制理论
考虑仿射非线性系统:
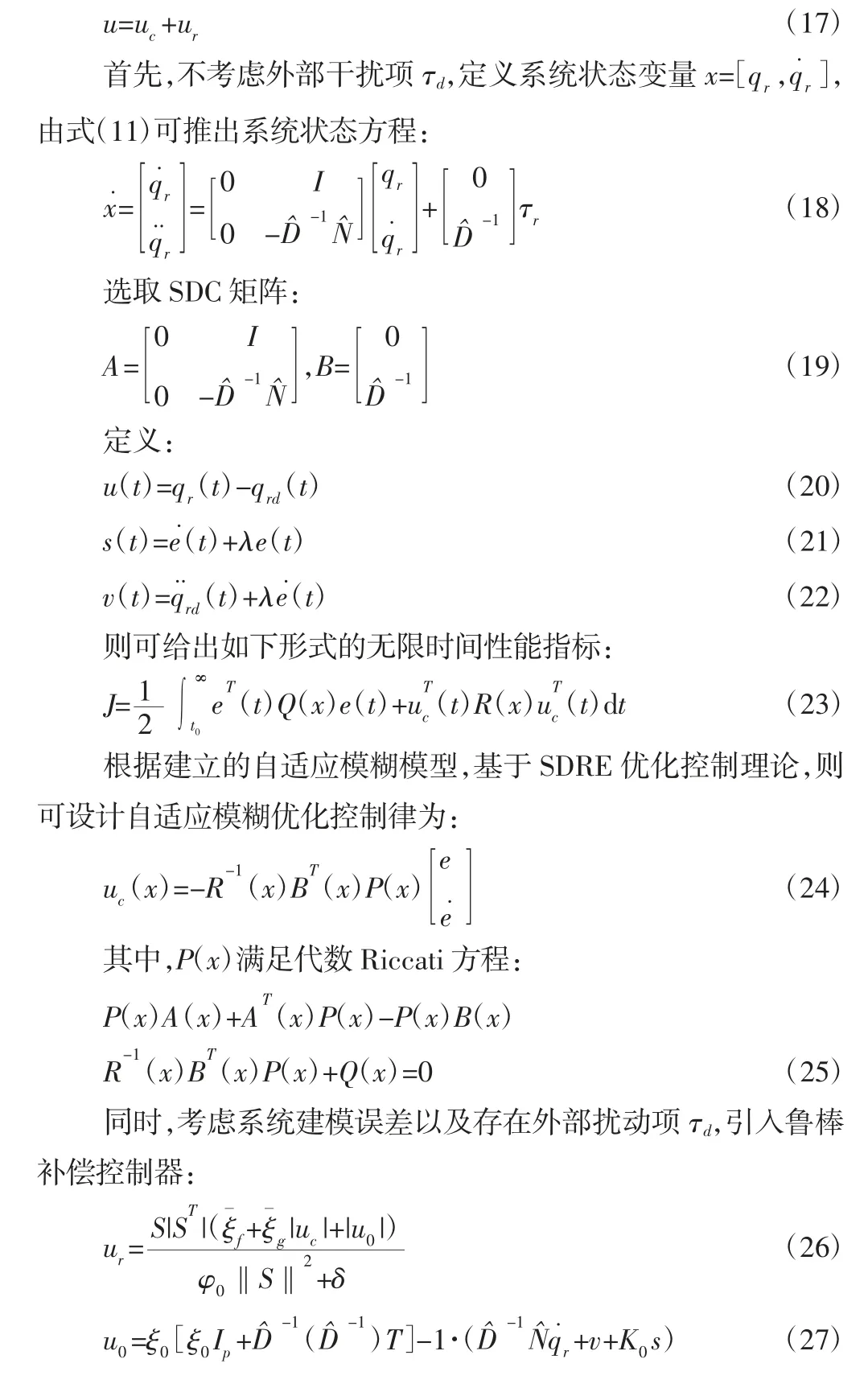
3.2 自适应模糊优化控制器设计

图2 自适应模糊优化控制系统Fig.2 Adaptive Fuzzy Optimal Control System
DFFSR 系统关节空间控制系统框图,如图2 所示。所设计控制器包括优化控制器和鲁棒补偿控制器两个部分组成:
4 仿真实例
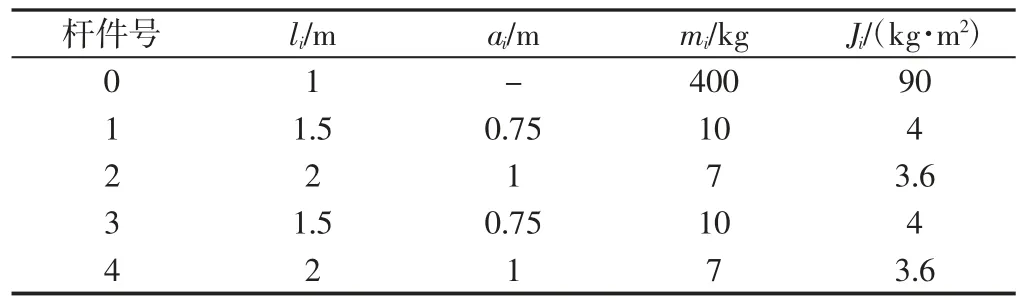
表1 系统模型参数Tab.1 Model Parameters of System
以图1 所示的平面二连杆DFFSR 系统为仿真对象,其系统参数,如表1 所示。系统初始运动参数为:
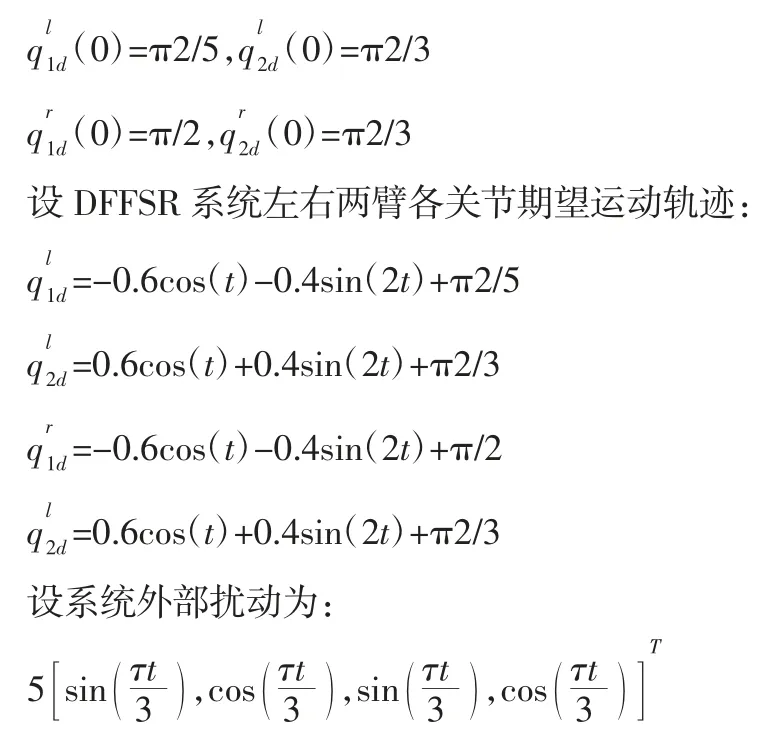
仿真算例一:
考虑系统存在惯性参数未知以及外部扰动等不确定性,使用自适应模糊优化控制律式(17)控制DFFSR 系统关节运动,仿真时间t=15.0s,得到左右两臂各关节运动轨迹跟踪情况,如图3所示。以及各关节输出力矩,如图4 所示。
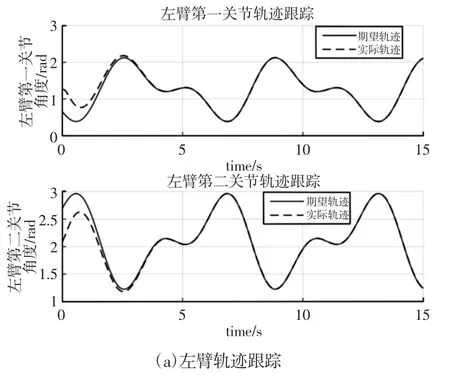
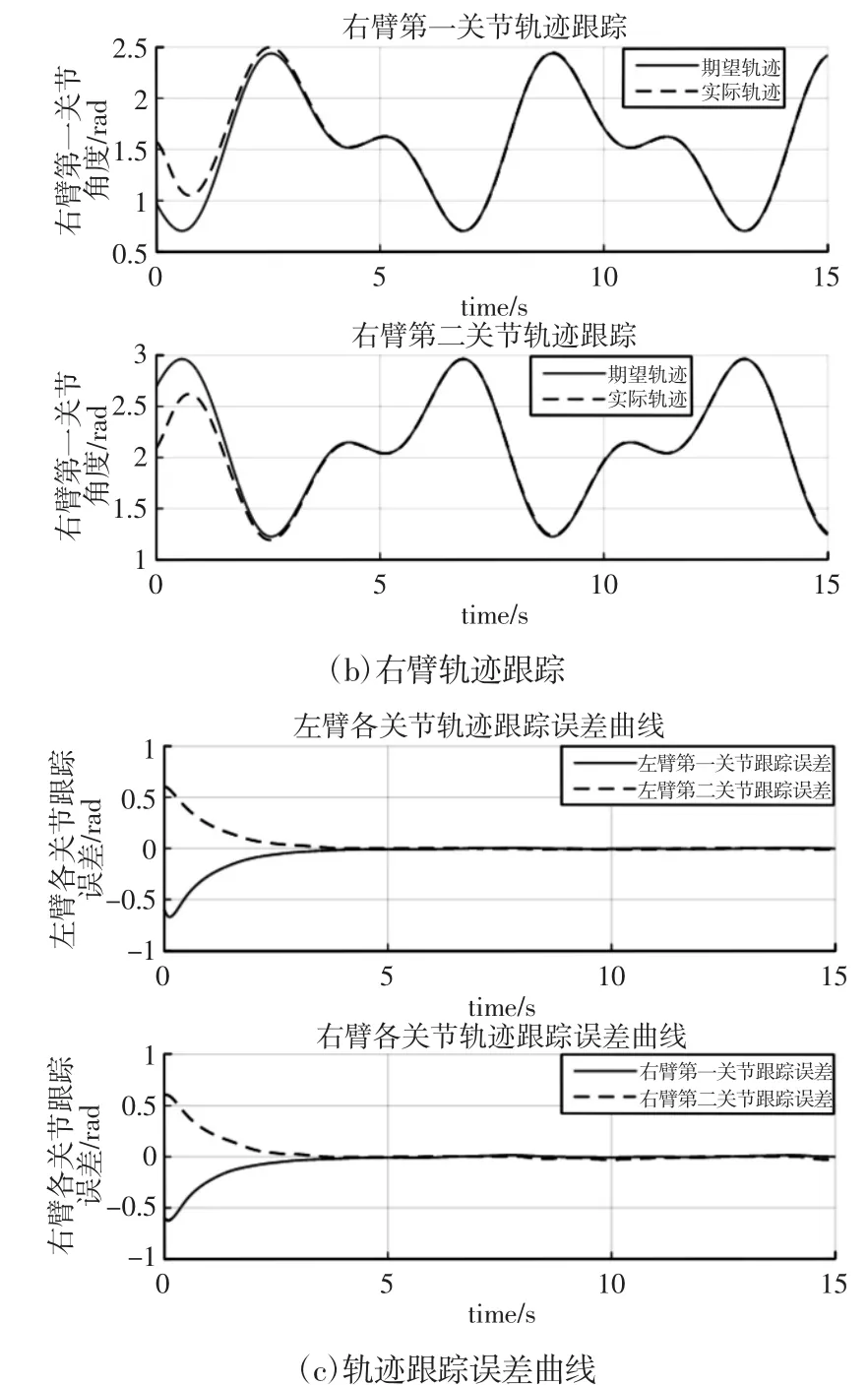
图3 DFFSR 关节角运动控制Fig.3 Trajectory Tracking of DFFSR in Joint Space
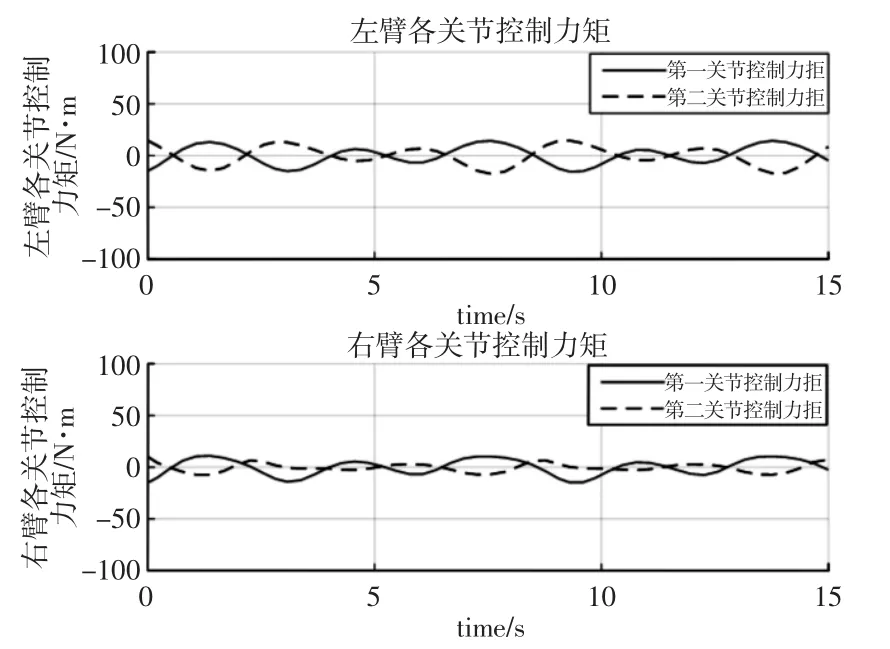
图4 DFFSR 系统输出力矩Fig.4 Control Torque of DFFSR System
仿真算例二:
为进一步证明所设计控制器的有效性和优越性,考虑在获得系统精确参数模型前提下,使用常用PD 控制律式(31)进行仿真实验,仿真时间t=15.0s,得到左右两臂各关节运动轨迹跟踪情况,如图5 所示。以及各关节输出力矩,如图6 所示。

综合分析以上仿真结果,对比图3 和图5,证明了所设计控制器较一般控制器在跟踪精度以及抗干扰能力上具有明显优势;对比图4 和图6,可以看出,所设计控制器考虑了力矩优化问题,整体输出力矩均保持在较小合理范围内。
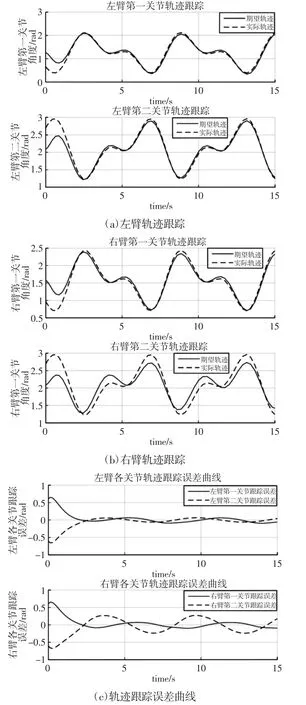
图5 DFFSR 关节角运动控制Fig.5 Trajectory Tracking of DFFSR in Joint Space
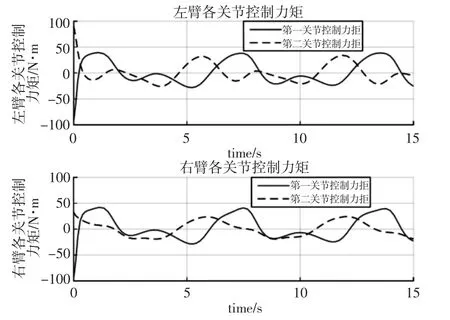
图6 DFFSR 系统输出力矩Fig.6 Control Torque of DFFSR System
5 结论
考虑空间环境存在惯性参数未知及外部扰动等不确定性因素,针对DFFSR 系统关节角运动控制问题,提出了一种自适应模糊优化控制方法,一组对比仿真验证了所提控制方法的主要优点有:(1)无需精确知道系统惯性参数等先验信息;(2)系统具有较好的抗干扰特性;(3)实现了输出力矩的优化。
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28