环卫洗扫车上装智能语音识别系统浅析
2021-05-07 12:48卢军波潘昌财肖正奎
汽车电器 2021年4期
卢军波,何 伟,潘昌财,肖正奎
(重庆凯瑞特种车有限公司,重庆 400900)
1 引言
近年来,随着中国经济的飞速发展,城市文明建设需求的凸显,城市道路清扫保洁、垃圾收运、扬尘抑制等成为城市文明建设的重要组成部分。环卫洗扫车是一种承担城市主干路扫地、吸尘、洗地、垃圾回收、运输等功能为一体的经济实用型车辆,在城市道路清洁过程中得到广泛应用。但是,目前环卫洗扫车驾驶员既要保证车辆行驶安全,同时还要根据路面或周边情况手动操作控制面板或实体按键来选择适当的作业模式,很容易导致驾驶员分心,视线离开路面而发生安全事故。为解决这一实际运用问题,特别提出了一种环卫洗扫车上装智能语音识别控制系统装置,通过语音控制方式完成对车辆上装作业的操作和控制,从而让驾驶员可以甩掉原有的手动操作、触屏操作,有效提升路面行车安全性及作业时的便捷性。
本文以环卫洗扫车为例,介绍上装智能语音识别系统的设计及验证。
2 系统构成
智能语音识别系统构成:麦克风、语音处理模块、显示屏主板(前操作面板总成)、液晶屏、上装控制模块、扬声器、执行模块。
智能语音识别系统原理框图如图1所示。

图1 智能语音识别系统构成和原理框图
3 系统工作原理
麦克风获取语音信息后,将语音信息传输至语音处理模块,语音处理模块处理完成后与预存的作业指令表进行比对,根据对比结果,输出相应的指令到显示屏和上装控制模块,完成显示和动作驱动,各关键部件工作原理如下。
1)麦克风:用于获取外部输入的语音数据,并将语音信号转换为电信号;
2)语音处理模块:①负责驱动麦克风;②将转换为电信号的语音波形进行数字滤波、自适应降噪、回声消除等处理;③对处理后的语音波形与预存的语音命令通过DNN算法,进行比对识别语音特征。
3)显示屏主板(前操作面板总成):显示屏内会预存作业语音指令表(表1),通过语音处理模块发出的语音指令,其结果是相对应的语音指令的序号,显示屏只需要解析出与之相对应的序号,同主板内预存的语音序号进行比对,即可获知当前语音指令并完成显示。
4)上装控制模块:用于分解显示屏(前操作面板总成)输出的数据信息,并转换为各个执行模块的控制指令。

表1 作业语音指令表
5)执行模块:在接收到上装控制模块指令后,根据指令准确控制各个执行对象(电机、风机、电磁阀等)。
6)扬声器:对预设的语音指令进行声音播报,实现语音交互体验。
4 系统关键技术
虽然语音识别技术已经有了飞速的发展,但环卫车在作业时,副发动机以及作业装备仍会产生巨大的噪声,为保证强噪声下系统的识别成功率,音频信号识别和降噪处理就成为该套系统的关键技术。
4.1 音频信号识别
系统在采集到音频数据输入后,通过特征算法将声音进行分帧和叠加数字化处理,然后将声音数据的首尾端做静音切除,降低后续步骤的干扰。再对处理后的数据进行人声提取,把提取的数据通过算法变成一个包含声音信息的多维向量,形成一个特定矩阵。同时,建立语言模型,对回声进行估算,通过修改滤波器参数值,使估算值更接近真实的回声,然后将回声估算值在输入信号中减去,从而达到消除回声,避免自激。再运用声学模型和语言模型对语音数据进行训练,确定特征向量,将输出的音素信息与提取人声特征后的音频数据进行比对,输出适合的语言编码。音频信号识别流程如图2所示。
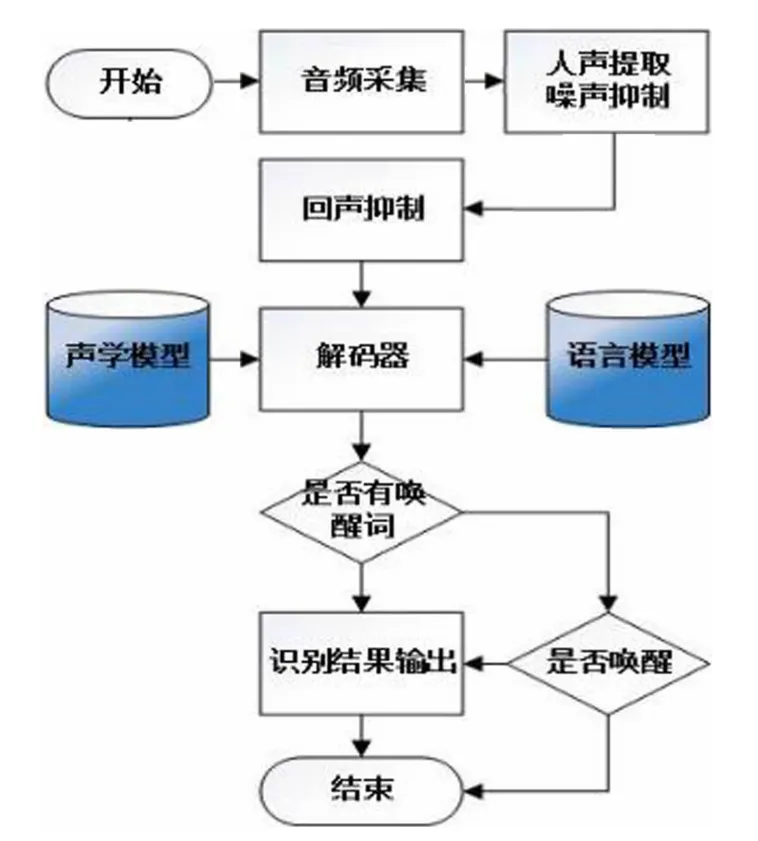
图2 音频信号识别流程
4.2 降噪处理
4.2.1 调整麦克风灵敏度与信噪比
麦克风的灵敏度和信噪比两个参数直接影响语音识别效果,灵敏度太高将会采集到更多的背景噪声,使得语句难以判断;太低则采集的信号强度不够,无法进行有效的信号分离。同理,信噪比太低,信号与噪声分离困难;太高,各个频率的音频分量过大,将直接影响识别进度和效果。结合台架测试及洗扫车实车测试验证,本系统选择的麦克风灵敏度为-28dB,信噪比为70dB。
4.2.2 调整电源洁净度
音频处理过程中,电源的洁净度将直接影响整个系统的信噪比。而车载电源在工作中由于发动机转速变化、液压系统负载变化、大功率设备的启停等各种外部原因会导致系统电源有较大程度的波动。针对这种情况,对语音识别系统供电电源进行二次处理,将电源纹波从200mV调至50mV,有效降低了电源波动对系统的影响。
4.2.3 静态软件滤波
一般人说话的语音范围大概在300~3400Hz的频率范围内,而环卫洗扫车的噪声主要来源于风机噪声以及发动机噪声。经过驾驶室隔离之后,风机噪声多集中在500Hz以下,发动机的噪声一般集中在200Hz,针对这一特点,通过软件静态滤波,着重提取人声段信号进行处理。
4.2.4 动态软件滤波
环卫洗扫车的环境噪声在一定的作业模式下是相对固定的,针对这一特点,通过软件动态滤波,在人未发声的情况下进行环境噪声信号采集,以此作为当前的噪声基频再通过声波叠加原理,将噪声信号通过加权反向叠加到采集的信号中,从而达到降低噪声分量的目的。
5 系统测试验证
通过对系统进行台架及实车验证,确保系统功能满足设计要求,同时在验证过程中及时进行修正和优化,使产品识别效果达到最佳。测试结果如表2所示。
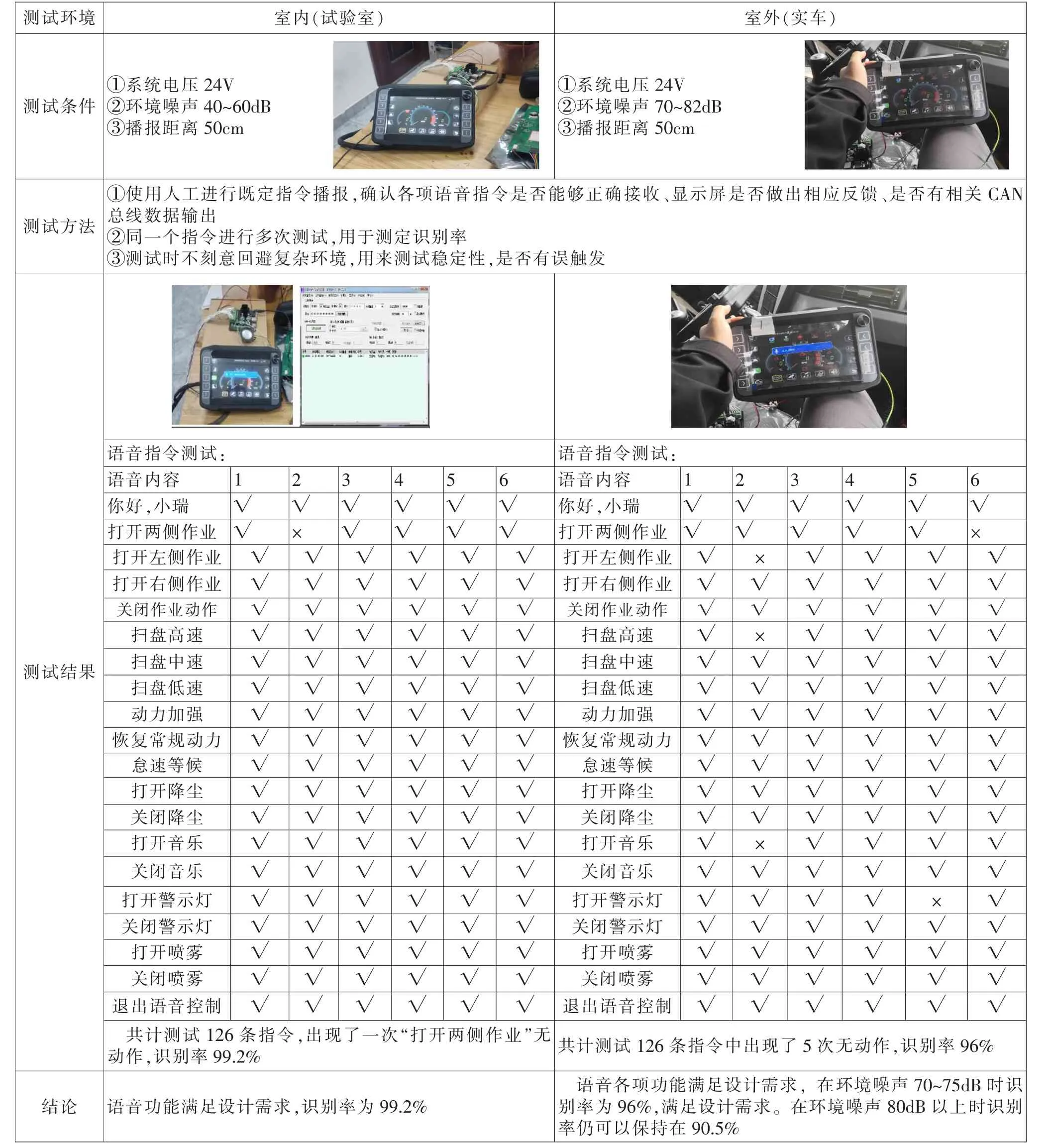
表2 测试结果
6 结束语
该智能语音识别控制系统产品已完成可靠性验证和试验工作,并已经实现市场销售,环卫洗扫车智能语音识别系统功能得到客户的认可好评。智能语音识别控制系统产品装车效果如图3所示。

图3 智能语音识别控制系统产品装车效果
随着国内环卫行业的快速发展,安全性和高端性也越来越被重视,环卫洗扫车智能化应用需求日趋明显。在人们原有的依靠手动操作、触屏操作,现在只需通过语音智能控制方式即可完成车辆上装的操作与控制,可有效提升行车的安全性和便捷性,因此智能语音识别系统更凸显在环卫车型中的应用价值。同时,可为整车提升产品档次,增加销售亮点。
猜你喜欢
电脑报(2022年24期)2022-07-01
现代仪器与医疗(2022年1期)2022-04-19
舰船科学技术(2021年12期)2021-03-29
小学科学(2016年12期)2017-01-06
电脑爱好者(2016年24期)2017-01-05
青少年科技博览(中学版)(2016年5期)2016-08-11
饮食科学(2016年7期)2016-07-27
科技视界(2016年11期)2016-05-23
现代电子技术(2015年17期)2015-09-23
做人与处世(2015年19期)2015-09-10