自动卸模机械手手爪的研究与设计
2021-05-26 09:09董伟
汽车实用技术 2021年9期
董 伟
(1.纯电动轿车及关键零部件河南省工程实验室,河南 三门峡 472000; 2.三门峡职业技术学院,河南 三门峡 472000)
1 前言
在一些工业生产领域,工人由于工作原因,往往会受到易燃易爆、致命气体等因素的存在,增加员工的劳动强度,甚至危及生命。因此,保障生产安全,降低生产价格,提高产品质量和经济效益是企业最应该面对的问题。自动化卸模机械手主要解放了工人在易燃易爆等恶劣环境下繁重而频繁的操作,虽然它不像手那样用途灵活,但它的特点是可以不断重复工作和劳动,不知道疲劳,不畏惧危险,而且抓举重物的力气也比手的力气大,特别是在高空、粉尘、易燃、易爆、高温的恶劣环境中操作中代替人作业,因此,它的应用越来越广泛,在远程观察下,自动卸模机械手会从加装区将模具从螺旋压力机构上安全卸下,并运送到螺旋水泥平台上,实现无先导卸模操作。卸模机械手的出现为卸模工作的完成提供了可靠的专业保障,为更全面实现模具更换的无人操作提供了参考[1]。
2 机械手的功能分析
2.1 模具的结构特点
模具有6套,形状相似,尺寸差异大不,长约1250mm,全身钢铁结构,重约500kg,模具示意图如图1所示。
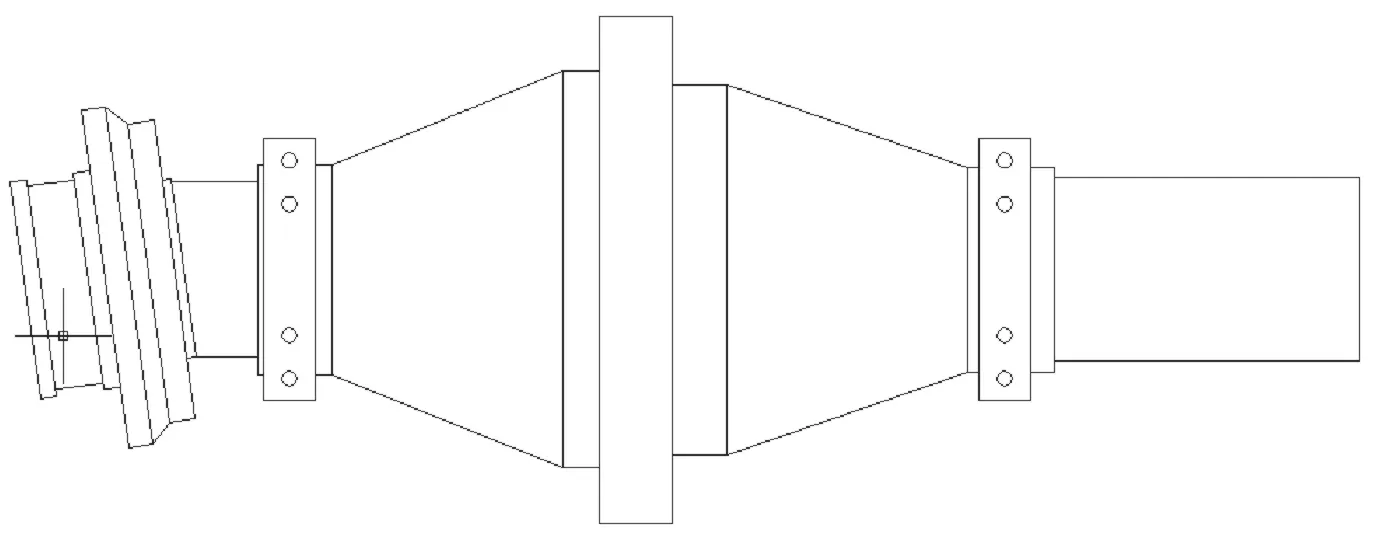
图1 模具示意图
2.2 机械手的组成
根据模具机构的特点和车间的布置,采用龙门架结构的直角坐标机械手,满足模具装卸空间运输的要求。 机械手主要由执行器,驱动系统,控制系统和位置检测装置组成[2]。 执行器包括手,腕,臂,柱等部分。驱动装置主要包括防爆电机和气缸,通过接近开关来防止机械部件间的碰撞,通过气缸拉动齿条来完成手爪的张开闭合,由防爆电机驱动来完成机械手的各个方向运动,通过配合可完成模具的装卸。机械手的控制系统通常由程序控制系统和电气定位(或机械停止定位)系统组成,如有必要,它可以监视机械手的动作并在出现错误或故障时发出警报信号。
2.3 卸模工作流程
在制定设计方案之前,要整理出卸模机械手的管理方法,首先卸模机械手从任何位置开始返回起始位置的方法,整个过程中,机械手爪打开到最大角度,机械手臂提升到最高位置,龙门框架也返回到左侧原点。在手动模式下,操作者在视频观察的帮助下,启动命令按钮进行操作。卸模机械手的提臂和侧臂配备有接近开关,可精确到达计划的停止位置。对于其他运动机构,需要达到的位置建议点动微调。
3 机械手手爪的设计
手爪是机械手执行机构的主要部件,其通过齿条的上下移动实现手爪的张开闭合,根据模具外形和质量大小,机械手的手爪采用两个机械夹钳式手爪将模具前后抓住来搬运工件。手爪的各种运动通常使用驱动机构和传动机构实现,机械手爪采用气缸作为其动力元件。从受力情况分析,当它在工作中,是直接承受安装框架,手部及工件的静态和动态负载,并有额外的自己运动。因此,手爪的结构、工作行程和灵活性等直接影响机构的工作性能[3]。
3.1 机械手手爪的设计分析
(1)手爪应具有较大的承载能力、良好的刚度和轻巧的自重;
(2)截面形式和轮廓尺寸应根据受力情况进行选择;
(3)提高支承刚度,合理选择支承目的距离;
(4)手部运动要灵活,惯性要小。
3.2 机械手手爪的设计计算
(1)手爪的类型。 工业机械手常用的手爪按夹持工件的原理将其分为两类:夹持式和吸附式。吸附式通常习惯于抓取工件表面平整、空间巨大的板状物体,而夹持式则会带动负荷较重的模具,且夹持程度较高[4]。根据模具的形状和尺寸,本设计选用了夹持机械手的手爪。以便使机械手能够游刃有余地操纵工件,因此本设计选择了两个夹紧手爪,夹紧力由两个气缸提供。手爪通过手爪固定座安装到机械手调整架上。
(2)齿条的设计计算。
1)按照所设计的传动方案,选用齿轮齿条传动;
2)防爆机械手为一般工作机器,速度不高,故选用7级精度(GB10095-88);
3)材料选择。由《机械设计》表10-1选择小齿轮为40Cr(调质),硬度为280HBS,齿条材料45钢(调质)硬度为240HBS,二者材料硬度差为40HBS;
4)闭式齿轮传动一般转速较高,为了提高传动的平稳性,减小冲击振动,小齿轮的齿数Z1=20-40,所以选择小齿轮的齿数Z1=28。
这样设计的齿轮传动装置在做到结构紧凑,避免浪费的基础上,又满足了各齿面接触疲劳强度和齿根弯曲疲劳强度。
(3)安装座的设计。
侧板的作用主要是用来固定机械手爪和气缸,用来确定手爪和齿条的位置,是机械手的重要组成部分,如图2为机械手侧板的设计结构图。
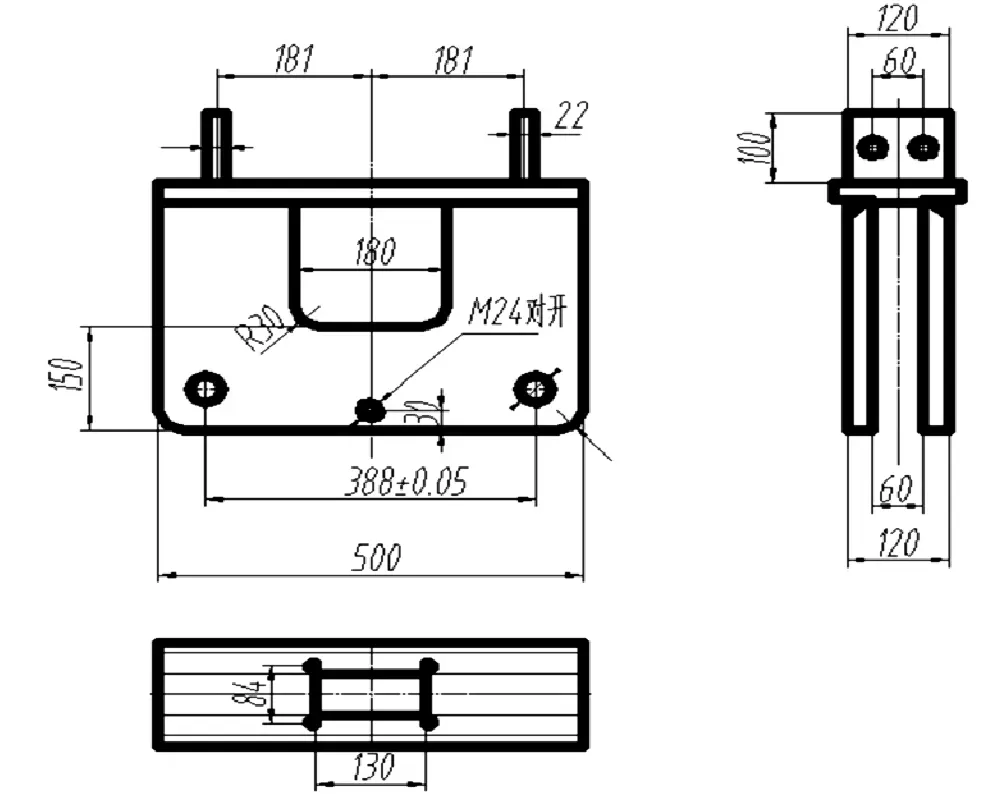
图2 机械手侧板结构图
(4)气动控制设计。
防爆卸模机械手手爪由气动元件控制,气缸的伸开和关闭由三位五通电磁阀控制,而阀芯在中间位置内,可长时间锁定气缸,在断气瞬间防止手爪伸开[5]。节流阀将改变空气流量,形成机械手的缓慢夹持速度及稳定。PLC控制气动系统,PLC逻辑输出管理方向阀的继电器开/关,实现方向阀体的动作,并完成气路的开/关,以控制气动回路。
3.3 机械手手爪的张开角度计算校核
根据前面的设计,初步设计的机械手手爪结构如图3所示。
3.3.1 对初步设计进行张开角度计算校核
在设计初期先假设使用型号为CDGPB15-150-D-B-97的气缸,那么气缸活塞杆伸长量为150mm,那机械手抓旋转角度为,则理论最大垂直距离为19.53mm,那么最终可实现向上提升距离为169.53mm<240mm(模具夹持位置直径),那么张开角太小,无法进行零件夹取。
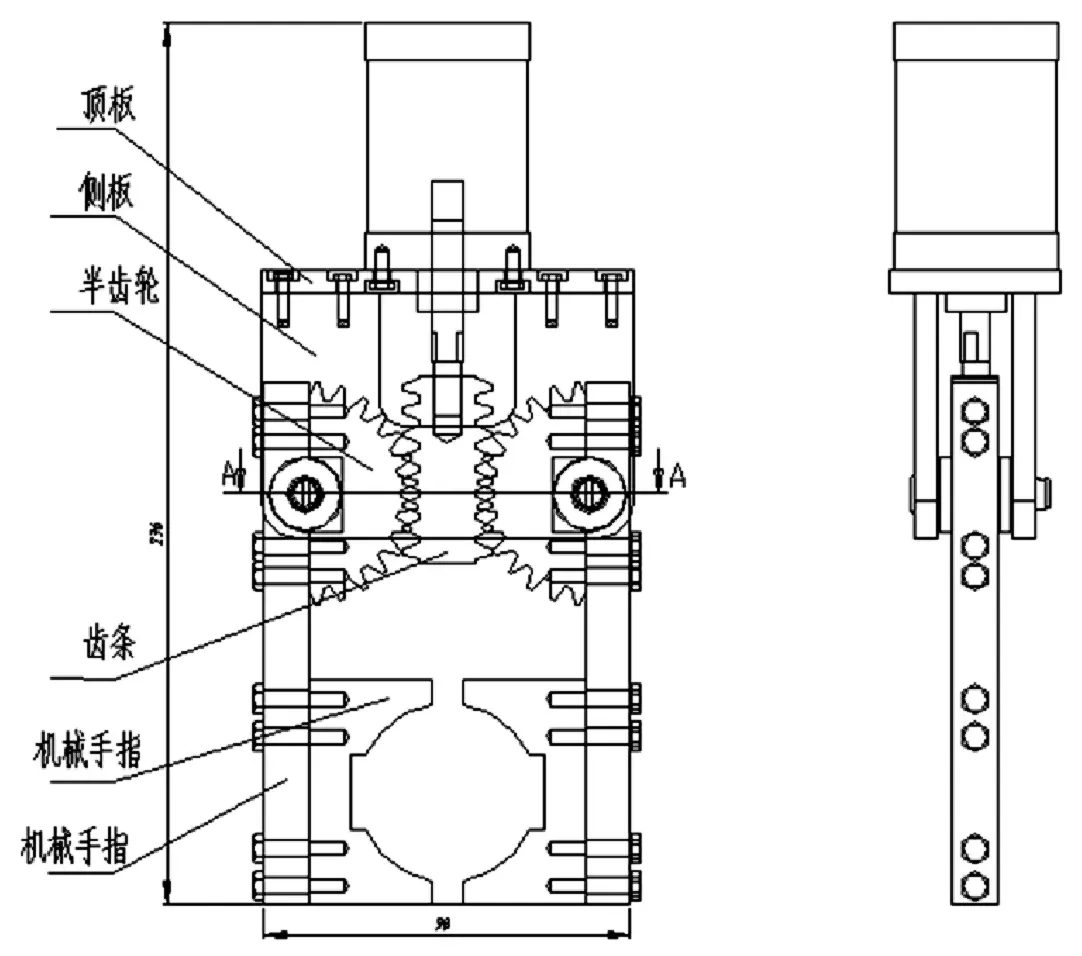
图3 机械手结构图
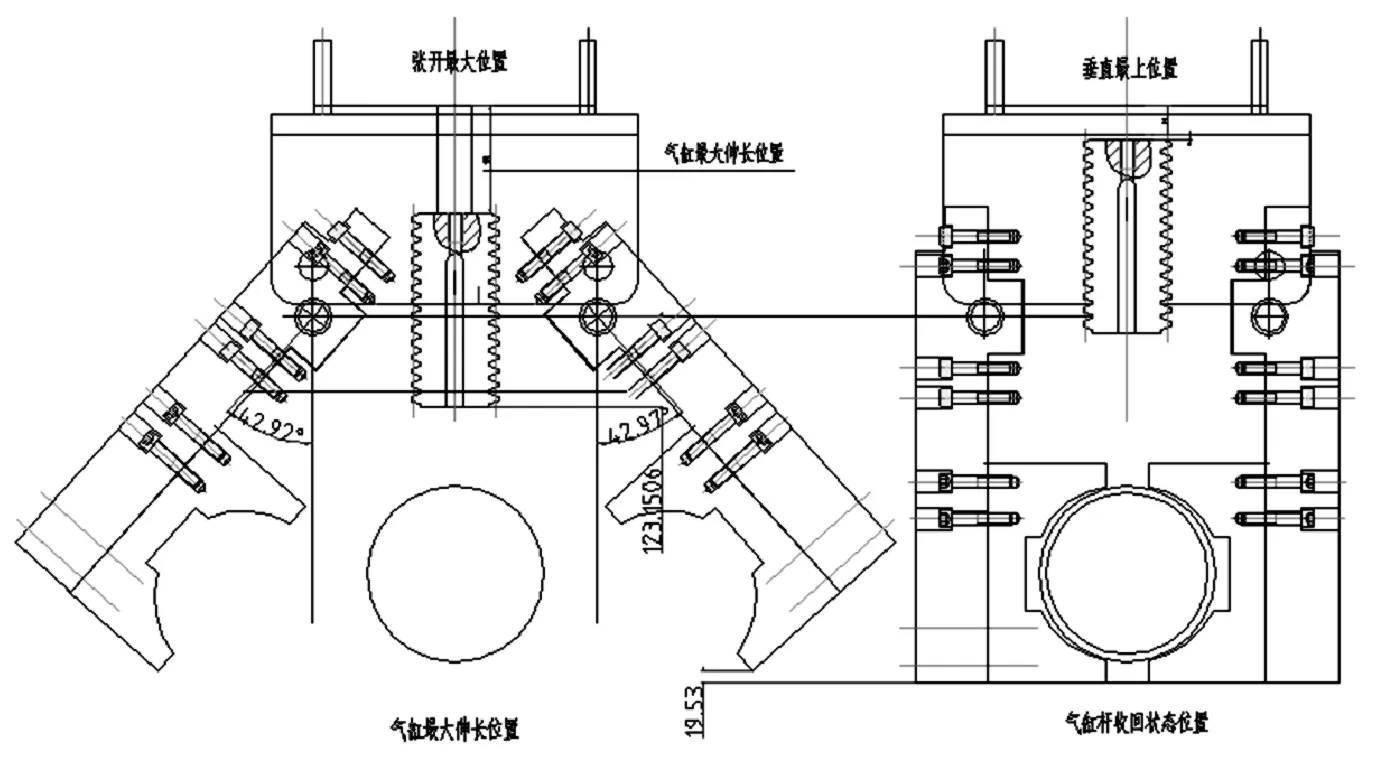
图4 机械手抓张开角度图
3.3.2 对优化后的机械手手爪进行张开角度计算校核
通过分析,需对三部分进行调整:首先更改气缸型号,选用CDGPB15-200-D-B-97的气缸,则气缸活塞杆伸长量为200 mm,其次将机械手手抓下部分减小50mm,第三安装旋转销位置提高100mm。机械手抓旋转角度为,则理论最大垂直距离为118.26mm,那么最终可实现向上提 升距离为118.26+100+50=268.26>240mm,那么张开角满足要求,可进行零件的夹取。
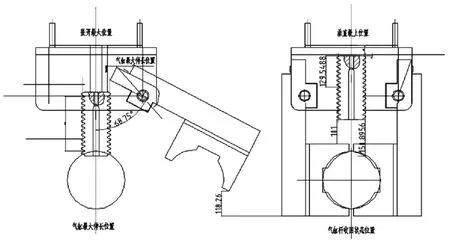
图5 机械抓重新设计后张开角度后
4 结论
防爆机械手是恶劣环境中装配的重要工具,本文针对模具的特点,设计了机械手组成,对机械手爪进行了设计分析,设计了手爪的类型,并对机械手爪的张开角度初步进行了计算校核,通过优化设计方案使张开角满足模具的要求,可进行零件的夹取。
猜你喜欢
汽车维护与修理(2022年3期)2022-08-02
农机使用与维修(2022年7期)2022-07-14
机电工程技术(2021年3期)2021-09-10
诗潮(2019年10期)2019-11-19
环球时报(2019-07-18)2019-07-18
东坡赤壁诗词(2018年3期)2018-07-16
读者·校园版(2018年13期)2018-06-19
现代职业教育·中职中专(2018年7期)2018-05-14
科技创新导报(2016年9期)2016-05-14
延河·绿色文学(2015年4期)2015-06-01