
隧道掌子面岩体裂隙快速识别方法
2021-06-06 08:36侯高鹏
西南交通大学学报 2021年2期
冷 彪 ,张 毅 ,杨 辉 ,侯高鹏
(1. 西南交通大学土木工程学院,四川 成都 610031;2. 西南交通大学交通隧道工程教育部重点实验室,四川 成都610031;3. 中铁二院工程集团有限责任公司,四川 成都 610031)
隧道工程中,工程地质情况一直是参建各方十分关注的问题. 隧道施工期形成的掌子面蕴含大量地质信息,随工程推进,掌子面不断产生变化,地质状态也在发生改变. 掌子面岩体结构特征评价是隧道工程的基本工作,可用于围岩分级、稳定性预测、支护设计[1]和施工工艺设计. 实际工程中,受现场条件、技术条件限制,多数情况下仍然通过技术人员,根据既定记录格式实录填写掌子面地质信息. 如填写人员无实际经验,记录结果不够准确,易导致对围岩地质状况评价结果出现偏差. 另外,对掌子面地质信息主要以定性分析为主,缺少定量描述,难以更加精细的指导设计和施工.
目前国内外对掌子面地质信息自动提取和分析已开展了一定研究. 通过数码照相采集掌子面图像信息并自动分析是其中的一种方法. 数码相机的普及,使掌子面数码图像获取相对容易,图像处理采用数字图像处理技术,当自动图像处理和识别岩体裂隙等特征难度较大时,加入人工干预,以实现对掌子面岩体特征分析,也能满足一定使用需求.
Leu等[2]对隧道掌子面数字图像的处理及应用过程进行了分析. 周春霖等[3-4]介绍了基于Hough变换检测和识别岩体裂隙的算法,但Hough变换仅适用于检测近似直线的裂隙,不适合检测连续的非直线裂隙. 范留明等[5-6]利用模板匹配和阈值匹配算法检测岩体裂隙,其检测结果采用人工方式提取岩体裂隙,效率较低,对具有大量裂隙的岩体处理工作量极大. 叶英等[7-8]对预处理后的岩体图像进行了统计特征分析,用于统计特征的图像已经过图像处理,是否可直接用于特征提取未经验证,故统计特征的可靠性仍有待证实.
掌子面岩体裂隙是掌子面上的典型特征,可用于统计节理分组、平均裂隙间距、单位面积裂隙长度等特征参数[6],以评价掌子面岩体稳定性. 本文对掌子面岩体图像的采集、图像处理、裂隙识别及节理分组方法进行了研究,提出一种对掌子面数字图像中岩体裂隙识别的算法. 通过岩体裂隙分析,实现对直线和非直线状岩体裂隙边界线自动提取,提高了岩体裂隙提取速度. 根据提取结果,建立了岩体裂隙边界线自动分组方法. 该研究成果可作为掌子面岩体地质素描的一部分,大大降低掌子面地质素描时间,提高地质素描准确性. 可据此生成掌子面地质素描图,自动计算掌子面岩体特征参数,对掌子面地质情况做出定量分析和定性评价.
1 掌子面岩体信息分析方法
掌子面岩体信息分析方法如图1所示. 首先采用图像增强算法使图像与视觉响应特性相匹配,提高掌子面图像视觉效果;然后对图像进行边缘检测和边界线提取,对提取边界线进行拟合、拆分和连接,得到岩体裂隙边界线自动提取结果,对提取结果进行人工修正后,采用算法对裂隙边界线进行自动分组,若分组结果有误,可再次进行人工分组修正;最后得到不同分组下岩体裂隙边界线掌子面地质素描图.

图1 掌子面岩体信息分析流程Fig. 1 Flow chart of analysis of rock mass in the face
隧道施工环境复杂,采集掌子面图像时,尽量避免施工粉尘影响、人工和施工机械干扰,为便于图像处理和图像解析,摄影位置尽量位于掌子面后方中间位置,摄影距离以相机能刚好采集到完整掌子面区域图像为宜,摄影时应尽量保证良好光照条件,保持光线均匀,镜头主轴方向与掌子面垂直,有条件时,尽量设置三角架采集图像.
采集图像前,在掌子面两侧底部各设置一标记点,测量两标记点间实际距离,以对不同时期采集掌子面图像设置统一图像像素与实际尺寸比例关系.采集图像时,若受客观条件制约,图像成像质量欠佳,应通过图像增强算法进行预处理,以提高图像质量.
2 裂隙边界线提取
2.1 边缘检测
边缘检测能够检测出掌子面上的岩体裂隙,以便于提取和识别岩体裂隙.
传统边缘检测算子具有对噪声敏感、边缘定位精度低、边缘连续性差等特点[9]. 而Canny检测算子[10]能尽量降低噪声影响,标识出尽可能多的实际边缘,且检测边缘与实际边缘能最大程度接近,因此首先将Canny算子应用于掌子面岩体图像分析,如图2所示. 由图可知:图2(b)中Canny算子边缘检测结果极大保留了真实岩体裂隙连续边缘,能够较好反映图2(a)中真实岩层边界,有利于提高岩体裂隙边界提取成功率.
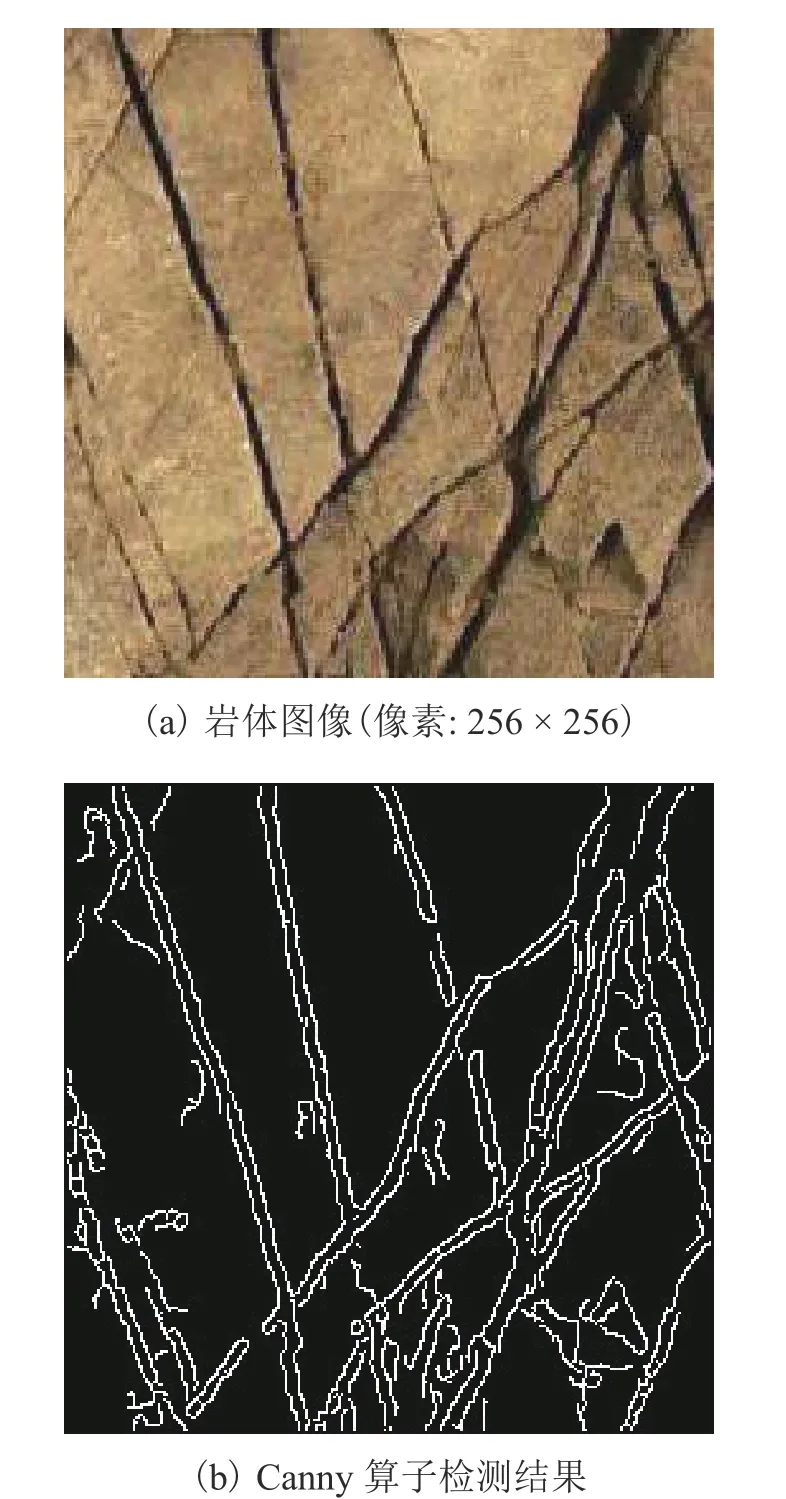
图2 Canny算子边缘检测Fig. 2 Canny operator edge detection
2.2 边界提取
边界提取算法用于提取边缘检测结果中所有可能的岩体裂隙边界线目标. 由于一些边界线目标存在分叉,使真实裂隙边界识别变得复杂,采用以下方法实现边界提取:
1) 图像细化
对图像进行细化,得到单像素宽目标边界,使任意边界像素点P的8连通区域内目标像素点只能通过P相连.
2) 清除分叉节点
对边界线上任一目标像素点,统计其8邻域目标像素点数N,若N≥ 3,则当前目标点为分叉节点时,将该点标记为背景像素灰度值.
3) 提取边界
对边界线上任一目标像素点,若其8邻域目标像素点数N= 1,则当前目标点为边界线端点时,以此点为起点,跟踪边界线目标像素点,直至另一端点,此过程将查找到边界线上所有像素点. 以此类推,可查找到所有边界像素点.
图3(a)为图像细化后一条完整的裂隙边界线,清除分叉节点后,得到图像3(b)中3条裂隙边界线.
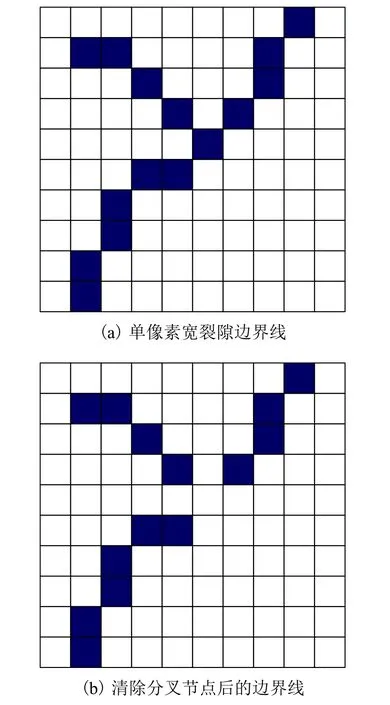
图3 单像素宽裂隙边界线处理示意Fig. 3 Diagram of single-pixel-width fracture boundary line processing
2.3 边界分析
2.3.1边界拟合
岩体裂隙通常在较小范围内近似呈直线,根据该特点,范留明等[5]采用Hough变换,对所有边界像素点进行分析,识别出岩体裂隙,该算法对识别近似直线裂隙边界具有良好效果,若岩体裂隙边界线曲率较大,则识别效果欠佳. 章毓晋[11]介绍了一种基于聚合的线段逼近法近似表达目标轮廓,该算法可将闭合目标边界拟合成多段线,若单像素宽裂隙边界线未闭合,则其拟合效果不稳定,且约有1/2的数据冗余. 这里采用以下方法提取出单像素宽未闭合裂隙边界线.
设一条边界线从一端到另一端像素点分别为pi(i= 1,2,···,n)(见图4),将p1作为拟合多段线起点,沿边界线依次分析各像素点. 设当前像素点为pj,依次计算像素点p2,p3,···,pj−1, 到线段p1pj的距离dj. 若所有像素点到线段p1pj的距离值均小于给定值dT,则继续分析pj+1;反之,则将pj−1作为拟合多段线上的端点之一保存,然后以pj−1为起始点,采用相同方法继续分析其后的像素点,直至完成所有像素点分析,即得到拟合多段线上的所有顶点.
采用不同距离阈值dT对图3(b)中的边界线进行多段线拟合,如图5所示. 结果显示:dT值越大,其拟合效果越差.
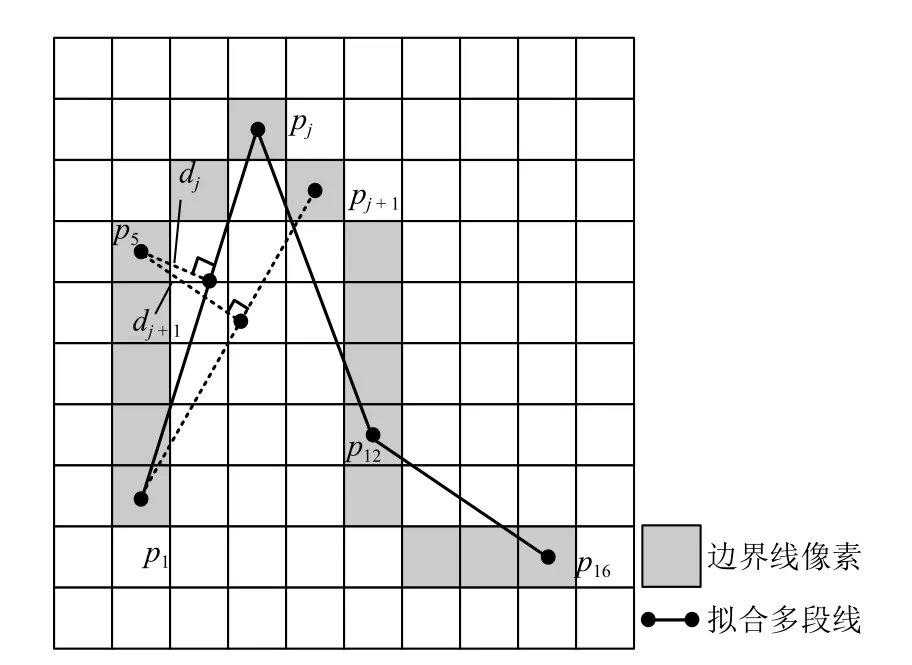
图4 原始边界及聚合结果Fig. 4 Original boundary and aggregation results

图5 边界线多段线拟合Fig. 5 Boundary line polyline fitting
2.3.2 边界拆分及合并
所有提取出的边界线目标可能是较平滑的直线,也可能是曲率较小的曲线,而岩体裂隙在较小范围内通常呈近似直线,因此采用以下步骤对可能为岩体裂隙的边界线进行筛选.
步骤1设定分离阈值αT,若多段线上某两相邻线段间夹角小于αT,则将多段线从这两相邻线段的公共点处分离成两条多段线. 图6中,原拟合多段线L1中p2、p3、p4构成的夹角α小于αT,则将L1从端点p3处分离成L2和L3两条多段线.
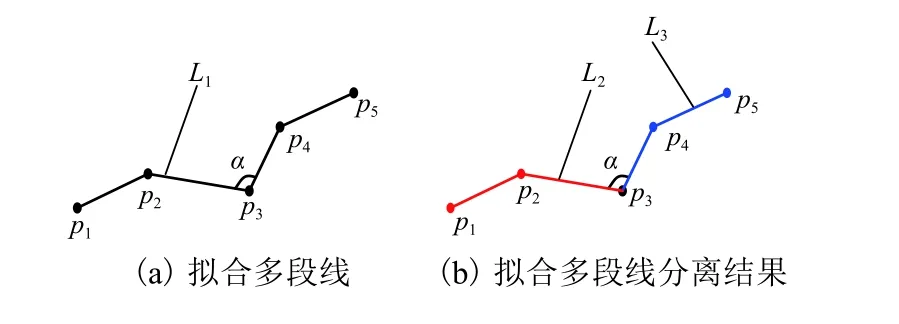
图6 拟合多段线分离Fig. 6 Fitted the polyline separation
步骤2对两两相邻多段线,以R值表示两多段线通过最近邻点连接合并的可能性大小,令

式中:l1、l2均为两相邻多段线长度;D为两相邻多段线的最近邻点间连线长度;β1、β2均为连线与相邻两线段间夹角;βT、DT为给定阈值.
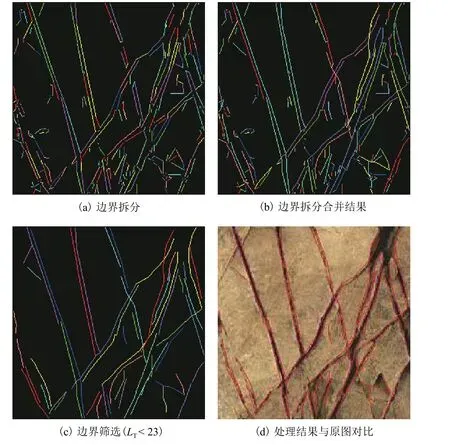
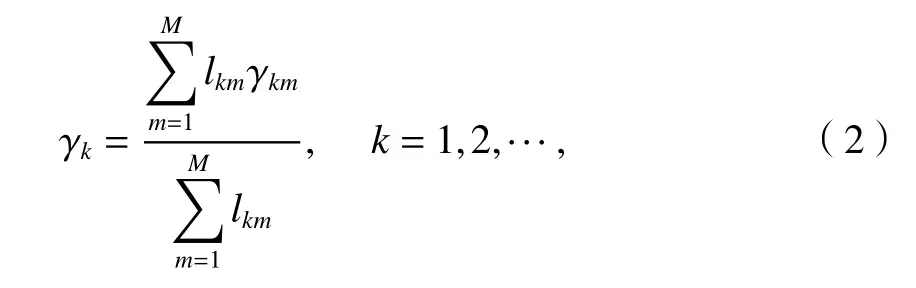
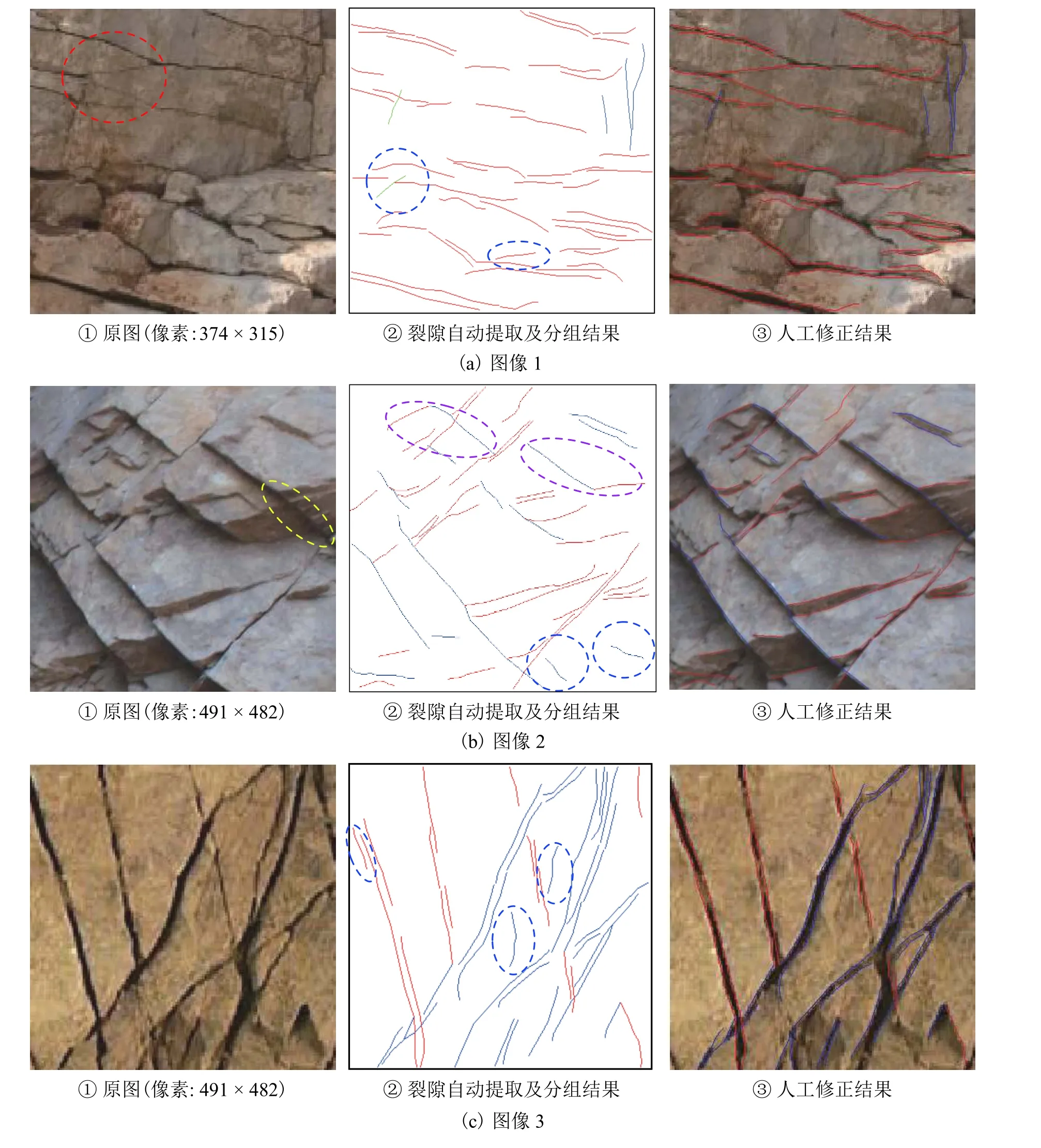
计算所有与当前多段线某端点可能相连多段线的R值并进行比较,将R值取最大值Rmax对应的多段线与当前多段线从最近距离端点处相连,合并成一条多段线. 图7中,L0与L1满足βT≤β3,≤180°,D3 图7 两近邻多段线相似性分析示意Fig. 7 Schematic diagram of similarity analysis of neighboring polylines 步骤3对连接后的多段线进行筛选,设置长度阈值LT,清除所有长度小于LT的多段线. 在图8(a)中,以不同颜色表示边界拆分后的各条多段线,图8(b)根据式(1)计算分析后合并形成的各条多段线以不同颜色标记,图8(c)显示了以不同颜色标记的最终边界筛选结果,在图8(d)中通过与原图对比,较好的实现了对裂隙的提取. 图8 边界拆分、合并及筛选结果(dT = 2)Fig. 8 Boundary split,merge and filter results (dT = 2) 在掌子面上,同一组岩体裂隙其拟合多段线方向基本一致. 统计所有多段线角度,根据角度值分布情况对裂隙进行分组,分组方法如下: 1) 计算所有多段线角度γk,如式(2). 式中:lkm为多段线Lk上第m条线段长度,与水平向右方向射线间夹角为γkm;M为多段线上的线段条数; 2) 将多段线按γk分类,每10° 为一类,得到{Po|o= 1,2,···,18}; 3) 计算Po的多段线长度之和so,查找函数so=f(o)的所有极大值点,合并相邻且对应o值之差不大于2的极大值点,得到集合{Sq|q= 1,2,···,Q}; 4) 根据{Sq}子集{Sqt|t= 1,2,···,T}中的Sq1和SqT,在so=f(o)中对应位置分别查找Sq1前最近邻极小值点位置o1、Sq1和SqT间极小值点o2、SqT后最近邻极小值点o3. 若T< 3,则在{Po|o= 1,2,···,18}中,将[o1,o3)间所有对应多段线划分为一组;若T≥ 3,则在{Po|o= 1,2,···,18}中,分别将[o1,o2)、[o2,o3)间所有对应多段线各划分为一组. 为了验证方法的可行性和可靠性,开发了“隧道掌子面地质信息系统”,对隧道内拍摄的掌子面图像进行分析. 系统中包含了“图像预处理”“裂隙自动提取”“裂隙编辑”“裂隙过滤”“裂隙分组”等功能. 在系统中,采用论文给出算法对3幅具有明显裂隙的掌子面区域岩体图像进行自动图像处理和解析,如图9所示. 调用裂隙自动提取算法处理时,基于经验,参数取值如表1. 图9 掌子面图像及岩体裂隙边界提取与分组结果Fig. 9 Image of the face and the boundary of the rock mass are extracted and grouped. 表1 岩体裂隙自动提取及分组结果与人工修正结果对比Tab. 1 Comparison of automatic extraction results and artificial correction results of rock mass fractures 在图9(a)①中:左上角有2条裂隙未成功提取,是因为该裂隙与背景对比底过低,使提取的裂隙不连续,被自动过滤删除. 图9(b)①中:有部分颜色较深、对比度不明显裂缝边界未被成功提取. 图9(a)、(b)、(c)中的图②分别有少量伪边界,是由伪边界与周边区域有一定对比度造成的. 图9(b)②上部有两条夹角较小边界多段线被正确分割成两条不同方向边界线. 图9(a)、(b)、(c)中的图③中,边界线对原始图像中的裂隙定位非常准确. 为衡量裂隙自动提取结果是否较好反映真实岩体裂隙分布情况,在表1中,对自动提取裂隙边界线总长度、人工删除伪裂隙边界线情况、人工添加未成功自动提取裂隙边界线情况、自动分组出错情况进行统计. 其中,Lt根据提取的拟合多段线进行计算,Rd=Ld/Lt,Ra=La/Lt,Re=Le/(Lt−Ld+La). 从表1可以看出:自动提取结果均进行了人工修正,但人工删除和添加的裂隙边界线长度占比极小,说明算法能够较好提取岩体裂隙边界. 在测试图像中,仅有图9(a)③中有一条错误分组边界线,结合图9(a)③、(b)③、(c)③可知,自动分组方法能够较好实现对岩体裂隙边界线分组. 根据测试结果,论文给出方法基本实现对掌子面岩体裂隙的提取,提取结果对岩体裂隙定位精度较高,裂隙边界线分组能够反映掌子面岩体裂隙的真实分组情况. 对自动处理结果,采用较少人工干预,即可得到实际的岩体裂隙提取和分组结果,形成掌子面地质素描图. 1) 论文提供了一种掌子面岩体裂隙自动提取和分组算法,该算法可用于分析掌子面图像岩体裂隙. 即采用Canny边缘检测算子检测出掌子面上所有可能的岩体裂隙边界,并根据真实岩体裂隙特征,对可能的裂隙边界线进行拟合、拆分、筛选、合并,获得岩体裂隙边界线提取结果,再根据裂隙边界线视倾角对筛选结果通过算法自动进行分组. 2) 论文给出的算法能够实现掌子面上岩体裂隙的自动提取和分组,论文通过实际掌子面图像测试,验证了算法的实际效果,提高了掌子面岩体裂隙提取和分组的自动化程度. 论文没有考虑渗水、挖土机挖掘痕迹等复杂情况,需要在后续研究中排除这些因素带来的干扰,进一步提高岩体裂隙自动提取方法的准确性和连续性.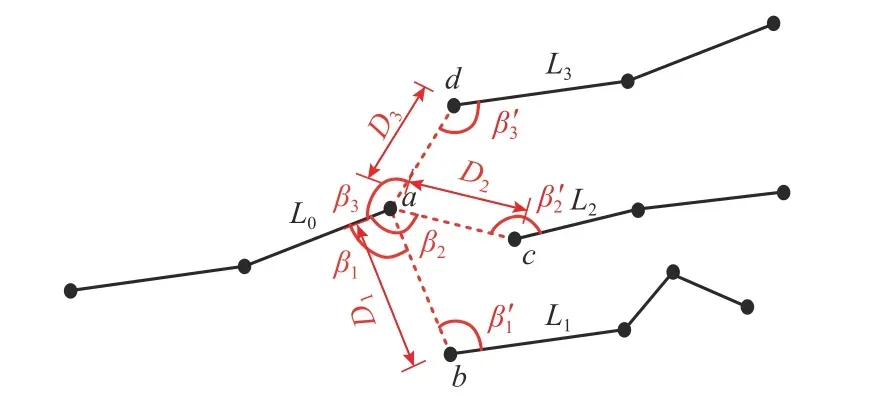
3 边界线分组
4 实际效果与讨论

5 结 论
猜你喜欢
第二课堂(课外活动版)(2022年5期)2022-05-25
现代电子技术(2021年1期)2021-01-17
铁道科学与工程学报(2020年10期)2020-11-19
铁道建筑(2019年7期)2019-08-08
福建交通科技(2019年2期)2019-05-18
中国铁道科学(2019年1期)2019-02-18
上海大学学报(自然科学版)(2018年5期)2018-11-02
学生天地·小学中高年级(2018年5期)2018-09-07
学生天地(2018年14期)2018-09-07
电脑知识与技术(2018年35期)2018-02-27
