中低速磁浮道岔主动梁动力学分析
2021-06-15 02:54庞振华
起重运输机械 2021年10期
唐 语 刘 放 吴 涛 庞振华
西南交通大学机械工程学院 成都 610031
0 引言
中低速磁浮是一种无接触的地面轨道交通系统,拥有经济、安全、安静等特点[1]。随着城际轨道的不断发展,中低速磁浮起着越来越重要的作用。
李苗[2]采用联合仿真对车岔刚柔耦合动力学模型进行了仿真计算;王党雄等[3]对磁浮列车-桥梁系统进行了耦合振动特性分析,运用实验和仿真的对比证明了可以将磁浮列车简化为均布荷载进行分析;Lee J S[4]建立主动控制磁悬浮车辆与柔性导轨结构动力相互作用的数值模型,研究了车辆模型、车速、不平顺性、轨道挠度比、跨距长度、跨距连续性和阻尼比对低速磁浮列车和轨道结构动力响应的影响。
以上文献主要研究了磁浮列车与轨道间的联合仿真分析以及实验中的表现,而很少对磁浮道岔梁进行有限元柔性体耦合振动分析。目前,国内外研究者对得到磁浮道岔梁的动力响应基本采用试验测试、多软件联合仿真、自行编程等。该问题较为复杂,联合仿真时间很长,为了简化流程,减少计算时间,本文通过采用有限元软件的隐式动力学方法进行仿真分析,得到磁浮列车在道岔主动梁上行驶时的动力响应。仿真结果表明增大道岔梁的质量与刚度对减小最大位移有明显作用。
1 车辆-道岔模型的研究
1.1 车体模型研究
磁浮列车主要由车体、悬浮架、电磁铁、迫导向装置等组成。磁浮列车的材料为铝合金6061,其密度为2 750 kg/m3,弹性模量为68.9 GPa,泊松比为0.33,质量为32 t,悬浮电磁铁在长度方向均匀发布,在仿真分析时可以将其视为均布载荷。
车体的主要作用是容纳旅客和货物,位置在空气弹簧上,空气弹簧另一端与悬浮架连接,悬浮架与轨道之间有悬浮电磁铁作用,可将磁场视为弹性阻尼系统,整体为二系悬挂。磁浮列车的车体、悬浮架和电磁铁的刚度远大于空气弹簧与磁场的刚度,在做动力分析时,可将部件看作刚体,而不用考虑其变形。
1.2 道岔梁模型研究
磁浮道岔主要由主体结构、驱动、锁定、控制、信号等部分组成。主体结构由主动梁、从动梁、连接板、台车、支座等结构组成[2];道岔梁的截面类似于箱形梁,组成材料为Q235,总长度为32 m,其中主动梁长度19 m。在道岔梁模型的简化和计算中,箱形梁支座通常为重要边界条件,主动梁的有限元模型如图1所示。

图1 道岔主动梁有限元模型
2 耦合模型动力学方程的建立
2.1 轨道不平顺时域函数分析
道岔梁的变形主要来源于车体的质量及车体振动引起的变形,而磁浮列车振动主要来源于轨道的不平顺。道岔梁的不平顺影响车体的振动而反馈于道岔梁,形成耦合振动。
轨道不平顺分为确定性激励和非确定性激励两大类,确定性激励由车辆和轨道某些特定因素造成,非确定性激励主要指轨道几何随机不平顺[5]。
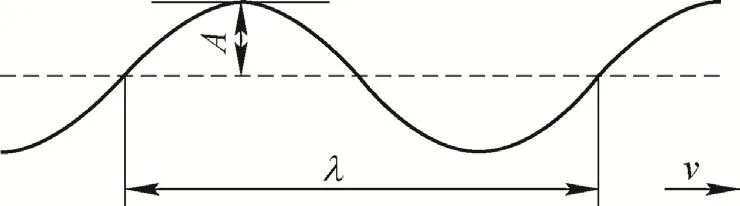
图2 轨道高低不平顺激励
本文主要研究的内容为道岔梁垂向动力响应,动力学分析时采用轨道的高低不平顺作为输入激励。对道岔梁的轨道不平顺采用高低不平顺谐波激扰位移输入函数进行描述[6],即

式中:L为谐波激扰波长,A为谐波激扰最大幅值,z为对应激扰函数幅值。
轨道不平顺可以位移激励形式表示,也可转换成力激励的形式导入到Ansys分析的载荷函数中,其力激励形式可表示为

2.2 系统动力学方程
系统动力学方程由道岔方程和车辆子系统的动力平衡方程联立而得[7]。道岔子系统的动力学方程可采用振型叠加法进行建模,其方程为

其中

式中:ξi、ωi分别为道岔子系统第i(i=1,2,…,Nq)阶振型的阻尼比和圆频率,Fq、Xq分别为道岔梁的广义力向量和广义位移向量。
采用振型叠加法计入道岔梁的前Nq阶振型,则

式中:qi、iφ分别为对应道岔子系统第i(i=1,2,…,Nq)阶振型的广义位移向量和振型向量,其中振型向量

式中:Nb为道岔结构有限元模型的自由度数。
将空气弹簧和电磁场模拟为线性弹簧、黏性阻尼,则磁浮列车的动力学方程为

式中:Kv、Cv、Mv分别为磁浮列车的刚度矩阵、阻尼矩阵和质量矩阵,Fv、Xv分别为作用力向量和位移向量。
由于不考虑每个列车单元之间的耦联关系,车辆动力学方程中的刚度矩阵Kv、阻尼矩阵Cv和质量矩阵Mv可由各列车相应的动力矩阵组合而成,即

式中:vn为第n(n=1,2,…,Nv)个悬浮架单元的序号,Nv为车辆单元总数。
联立式(3)和式(4)即可得到车岔系统动力学方程,由动力学方程可知,刚度、阻尼、质量、振动频率等参数的变化是影响道岔梁变形的主要因素。
2.3 振动评价标准
根据CJJT 262-2017《中低速磁浮交通设计规范》规定,轨道支承结构梁式桥跨结构在列车静活载作用下,轨道梁为简支梁时的竖向挠度不应超过L/3 800,轨道梁为连续梁时的竖向挠度不应超过L/4 600[8]。其中,L为梁的跨度,对于本文所研究的中低速磁浮道岔主动梁,可视为连续梁结构,其竖向变形的限值为4.1 mm。
3 动力学仿真
3.1 模型的设置
磁浮列车通过道岔时,结构承受载荷是变化的,可采用瞬态动力学分析[9]求解道岔主动梁车岔耦合振动分析。Ansys Workbench瞬态动力学分析采用的是时域分析瞬态法,即以时间为变量的直接积分法[10],主要设置包括材料选取、接触设置、约束类型、加载载荷等。在本次分析中,道岔梁的材料为Q235,道岔梁与过渡梁的连接方式为固结,车体与梁的接触类型为仅摩擦。磁浮车体与道岔梁虽在分析时与道岔梁紧密接触,但实际情况并未接触,仅仅是为了传递力与位移,故摩擦系数为0。约束位置为道岔梁与台车上表面接触面,采用固结,载荷为轨道不平顺激励与重力,其中轨道不平顺激励大小如式(2)所示。
3.2 仿真分析
某道岔主动梁长19 m,采用3台车对其进行承重及移动,本节先分析磁浮列车以20 km/h、40 km/h、60 km/h、80 km/h速度通过板厚25 mm的主动梁时梁跨中垂向动力响应情况。
图3为动力学仿真列车以20 km/h过岔时主动梁的应变云图,其最大位移0.668 mm,最大位移点发生在第一跨跨中处。图4为列车以20 km/h过岔时主动梁最大位移时域响应曲线,最大变形位置在每跨跨中处。

图3 主动梁应变云图
图5中曲线1、曲线2分别为列车时速20 km/h、40 km/h时道岔梁一跨的跨中垂向位移,曲线3、曲线4分别为列车时速20 km/h、40 km/h时道岔梁二跨的跨中垂向位移。图6中曲线1、曲线2分别为列车时速60 km/h、80 km/h时道岔梁一跨的跨中垂向位移,曲线3、曲线4分别为列车时速60 km/h、80 km/h时道岔梁二跨的跨中垂向位移。由此,磁浮列车以20 km/h、40 km/h、60 km/h、80 km/h速度通过板厚25 mm的主动梁时梁的最大跨中垂向位移分别为0.668 mm、0.671 mm、0.806 mm、0.881 mm。主动梁最大垂向位移的位置出现在列车重心在跨中附近时。由图可知,主动梁跨中垂向位移曲线主要由挠曲线和振动曲线叠加而成,其中挠曲线主要受梁的特征和车重等因素影响,在跨中数值大;振动曲线主要与列车速度、质量参数、轨道不平顺有关,速度越大,振动幅度越大。

图5 主动梁跨中位移图

图6 主动梁跨中位移图
由图7可知,在两台车支撑下,磁浮列车以20 km/h、40 km/h、60 km/h、80 km/h速度通过板厚30 mm的主动梁时,梁的跨中垂向位移分别为3.002 mm、3.046 mm、3.099 mm、3.155 mm。在三台车支撑下,磁浮列车以20 km/h、40 km/h、60 km/h、80 km/h速度通过板厚30 mm的主动梁时,梁的跨中垂向动力响应分别为0.541 mm、0.552 mm、0.573 mm、0.602 mm。在两台车支撑下,磁浮列车以20 km/h、40 km/h、60 km/h、80 km/h速度通过板厚25 mm的主动梁时,梁的跨中垂向动力响应分别为3.502 mm、3.529 mm、3.570 mm、3.608 mm。在三台车支撑下,磁浮列车以20 km/h、40 km/h、60 km/h、80 km/h速度通过板厚25 mm的主动梁时,梁的跨中垂向动力响应分别为0.668 mm、0.671 mm、0.806 mm、0.881 mm。
整理道岔主动梁的最大位移数据,可以得到改变梁参数时道岔梁最大位移的变化情况图,如图7所示。在道岔梁的多种不同参数中,增加车速,最大垂向位移有增加的趋势,但增加量并不是很大,说明对最大垂向位移变化起主要作用的参数是台车数及梁的厚度。三台车支承的位移要比两台车支撑位移小很多,且两台车支承19 m长、板厚25 mm的主动梁最大位移已接近安全位移,故只能采用三台车支承。增加梁截面板厚可大幅减小道岔梁最大位移,说明增大质量与刚度对减小最大位移有明显作用。
4 结语
1)基于中低速磁浮道岔主动梁的特征,先建立系统动力学方程,然后采用隐式动力学的方法对道岔主动梁进行车岔耦合振动仿真分析。通过不同列车速度、主动梁的不同厚度、不同数量的台车数等变量对道岔主动梁特性进行分析。
2)对中低速磁浮道岔主动梁进行耦合振动分析,在三台车支撑下,磁浮列车以20 km/h、40 km/h、60 km/h、80 km/h速度通过板厚25 mm的主动梁时,梁的跨中垂向动力响应分别为0.668 mm、0.671 mm、0.806 mm、0.881 mm。得出在速度测量的范围内,速度越大,梁的位移越大,但列车速度对道岔梁的位移影响较小。
3)对不同中低速磁浮道岔主动梁进行耦合振动分析,在三台车支承下,磁浮列车通过板厚30 mm、25 mm的主动梁时,道岔梁的最大跨中垂向动力响应分别为0.602 mm、0.881 mm。虽然小于危险值,但主动梁板厚对主动梁变形影响较大,增加梁刚度和质量是减少梁振动的有效方法。在两台车支撑下,磁浮列车通过板厚30 mm、25 mm的主动梁时,道岔梁的最大跨中垂向动力响应分别为3.155 mm、3.608 mm,道岔梁的位移很大,减少一个台车的支承会极大地增加道岔梁的位移,故增加支承约束是减少梁变形的有效方法。
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
科技视界(2022年10期)2022-05-20
黑龙江大学自然科学学报(2022年1期)2022-03-29
汽车工程师(2021年12期)2022-01-17
今日农业(2021年11期)2021-11-27
铁路通信信号工程技术(2021年7期)2021-07-27
铁道通信信号(2020年10期)2020-02-07
建材发展导向(2019年10期)2019-08-24
中学物理·高中(2016年8期)2016-08-08