水面靶标雷达辐射源天线实时引导的实现
2021-06-16 03:14王海涛马春波
电子制作 2021年3期
王海涛,马春波
(辽宁省大连市91550部队43分队,辽宁大连,116023)
0 引言
水面靶标[1]的作用是为反舰武器海上飞行试验提供水面舰艇目标模拟,安装于水面靶标的雷达辐射源用于模拟导航雷达、相控阵雷达等多种舰载雷达[2]的电磁辐射特性,为反舰武器系统雷达被动导引头[3]提供目标指示。海上试验时舰载雷达模拟主体装备,即雷达辐射源的靶载设备安装于靶标船体,工作时无人值守,其海试时工作状态控制由陆上遥控地面站试验人员通过无线方式远程遥控操作[4],要求雷达辐射源的发射天线阵列始终指向反舰武器的跟踪导引头,以达到反舰武器跟踪性能考核的目的。
1 雷达辐射源
在海上使用环境中,由于雷达辐射源所在的靶标船体平台自身姿态为水面航行或锚泊状态[5],且跟踪攻击靶标飞行的反舰武器位置也始终在高速机动变化,所以雷达辐射源的天线阵面应具有自动指向调整功能,以确保天线波束始终对准被试反舰武器。
■1.1 雷达辐射源组成
雷达辐射源系统组成包括位于船体上的靶载设备和地面遥控站两部分,图1为系统靶载设备和遥控终端组成框图。靶载设备主要由信号产生分系统、天线阵面分系统、伺服传动分系统、雷达控制与计算机分系统、电源网络分系统、热控分系统和标校设备组成;地面遥控站包括遥控计算机、遥控接口、微波或卫星通信链路等。
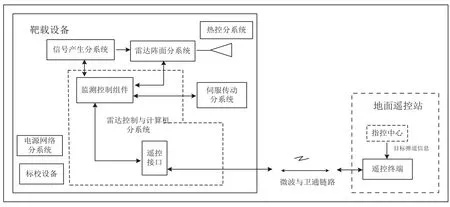
图1 雷达辐射源组成
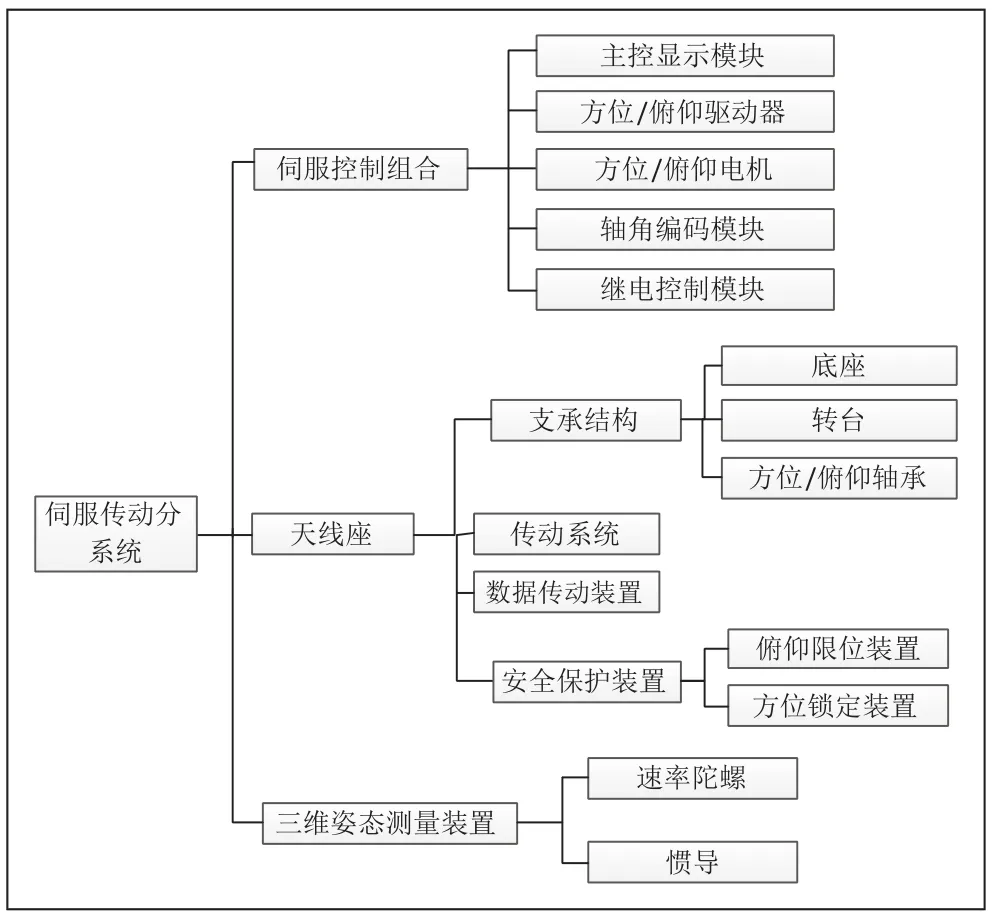
图2 伺服传动分系统组成
信号产生分系统产生低功率雷达模拟信号,天线阵面分系统对低功率雷达模拟信号进行功率放大后,由天线辐射到空间。伺服传动分系统由伺服控制模块、方位/俯仰驱动器、方位/俯仰电机和三维姿态测量装置[6]等组成,根据三维姿态测量装置给出的船体摇摆实时信息,再根据实时接收的遥控地面站发送的目标弹道信息,进行天线横轴、纵轴的稳定控制,保持发射天线阵面对反舰武器的精确对准。雷达控制与计算机分系统由控制板、遥控组件[7]等组成,遥控组件接收地面遥控站发送的遥控指令,由控制板对靶载设备各分系统的工作状态进行监控,同时接收目标弹道信息发送给伺服传动分系统;并向地面遥控站上传靶载设备工作状态信息。
■1.2 伺服传动分系统工作原理
伺服传动分系统[8]接收刀片计算机发送的引导数据作为位置输入信号,与位置反馈信号即轴角编码器数据比较,得到位置误差信号;位置误差信号经过放大、校正,输出速度控制信号经CAN总线送给伺服驱动器,控制电机驱动天线向减小位置误差信号的方向转动;并根据三维姿态测量装置给出的船体摇摆实时信息,实时接收遥控地面站发送的目标弹道信息,进行天线横轴、纵轴的稳定控制。如图2所示,伺服传动分系统由伺服控制组合、天线座和三维姿态测量装置组成。伺服控制组合由主控显示模块、方位/俯仰驱动器、方位/俯仰电机、轴角编码模块、继电控制模块、遥控盒等组成;天线座由支承结构、方位/俯仰传动系统、方位/俯仰数据传动装置、安全保护装置等组成。三维姿态测量装置由速率陀螺和惯导等组成。
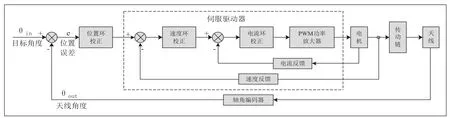
图3 伺服控制回路结构图
伺服控制回路如图3所示。伺服系统方位、俯仰驱动均设计为一个三回路控制系统[9],内回路设计可以减少回路内元件参数不稳定和负载扰动对伺服系统的影响。控制回路由内向外分别是电流环、速度环、位置环。伺服控制回路结构。由于海浪的影响靶载天线在跟踪和对准目标时,靶标船体的纵摇和横摇使得天线座的姿态发生变化,导致天线无法实时对准目标,从而影响跟踪及指向精度。目前常采用陀螺稳定和前馈稳定两种策略隔离船摇对天线伺服系统的影响。针对方位俯仰型天线座,陀螺稳定策略主要利用天线俯仰臂上的速率陀螺获取天线方位俯仰速率进行闭环控制,进而隔离船体的摇摆影响。
针对船摇速度进行补偿。利用船上惯导设备采集的船摇速度信息进行坐标变换,得出天线伺服系统方位俯仰轴的速度环路补偿量,从而实现船摇速度补偿。船摇的姿态信息包含横摇、纵摇、航向,三个轴向的船摇信息会对天线的指向造成扰动,在伺服系统内对船摇扰动进行补偿,可以消除船摇对天线指向的干扰。由于船摇扰动属于低频扰动,惯导内部陀螺采样率较高,且船载天线伺服系统的速度环带宽并不高,因此可以忽略数据传输及计算造成的时间延迟。
2 目标实时位置的坐标转换
■2.1 靶载设备的目标外引导弹道数据获取
在海上试验中,雷达辐射源可通过遥测信号[10]或者外测信号得到反舰武器,即目标的弹道信息。雷达辐射源靶载设备可通过遥控接口,接收来自遥控地面站的外引导目标实时弹道数据,通过雷达控制与计算机分系统经过多次坐标转换[11]解算后,再根据船体的实时坐标位置、航向角、纵摇和横摇姿态角综合解算,得到伺服传动分系统的两轴转台方位跟踪指令和俯仰跟踪指令,从而控制驱动伺服转台实现发射天线波束的动态对准跟踪,达到有效隔离船体的姿态变化和弹目相对运动[12]的目的。
■2.2 目标实时位置的坐标转换
在实际海试中雷达辐射源靶载设备通过遥控信道获取的目标外部引导信息是目标在大地坐标系下的经纬度,通过多次坐标转换可求得反舰武器在船体坐标系下的直角坐标值,其具体坐标转换的技术原理[13]如图4所示。
设目标在大地坐标系O1-X1Y1Z1下的坐标为 (Lt1,Bt1,Ht1),将其转化为地心坐标系O2-X2Y2Z2下的坐标值 (xt2,yt2,zt2):
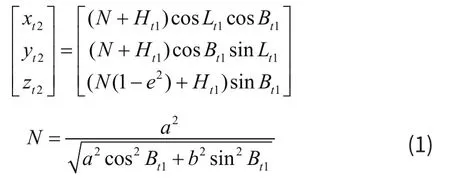
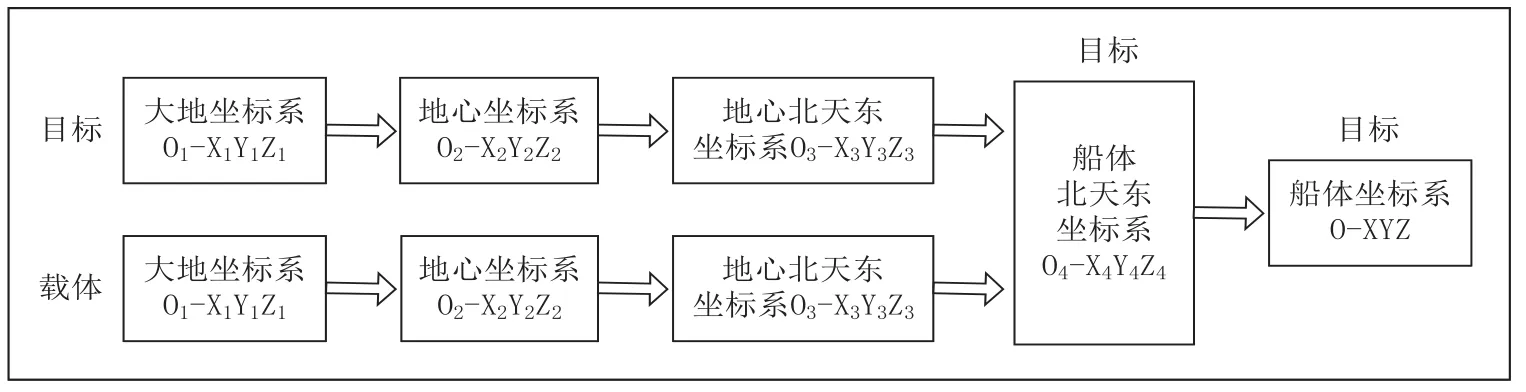
图4 坐标转换原理
在(1)式中,a和b分别为地球椭球的长半轴和短半轴,e为第一偏心率。
然后将目标在O2-X2Y2Z2下的坐标值 (xt2,yt2,zt2)转化为原点位于地心的北天东坐标系O3-X3Y3Z3下的坐标值(xt3,yt3,zt3):

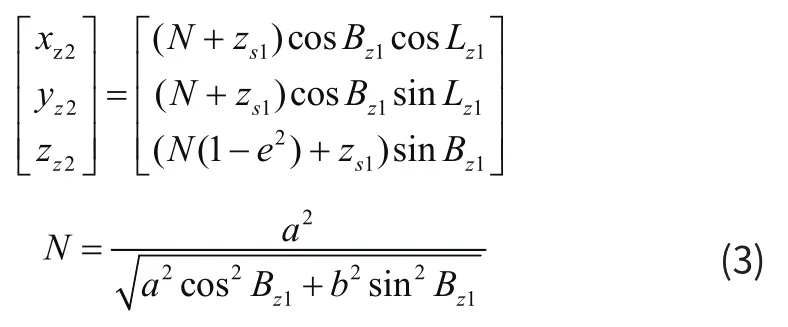
同理,将船体在大地坐标系O1-X1Y1Z1经纬度坐标 (Lz1,Bz1,Hz1)转化为地心坐标系O2-X2Y2Z2坐标值(xz2,yz2,zz2):
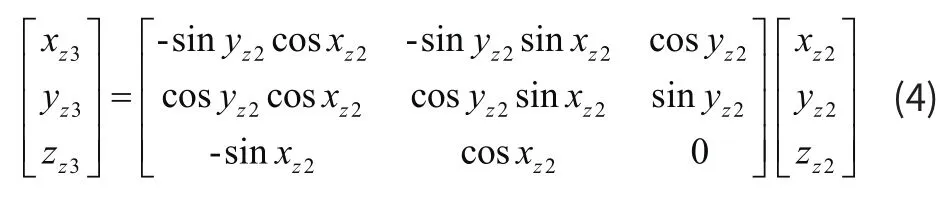
将船体在地心坐标系O2-X2Y2Z2坐标值(xz2,yz2,zz2)转化为原点位于地心的北天东坐标系O3-X3Y3Z3下的坐标值(xz3,yz3,zz3):
将目标在原点位于地心的北天东坐标系O3-X3Y3Z3坐标值 (xt3,yt3,zt3)转化为原点位于船体几何中心的北天东坐标系O4-X4Y4Z4下的坐标值 (xt4,yt4,zt4):
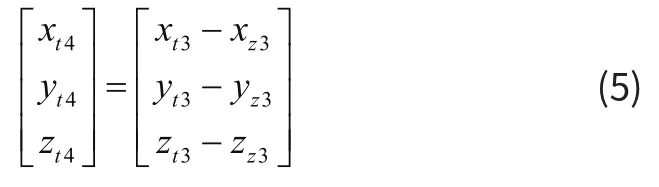
则反舰武器在原点位于船体的北天东坐标系O4-X4Y4Z4下的坐标值 (xt4,yt4,zt4)转化为在船体坐标系O-XYZ坐标值(x,y,z):
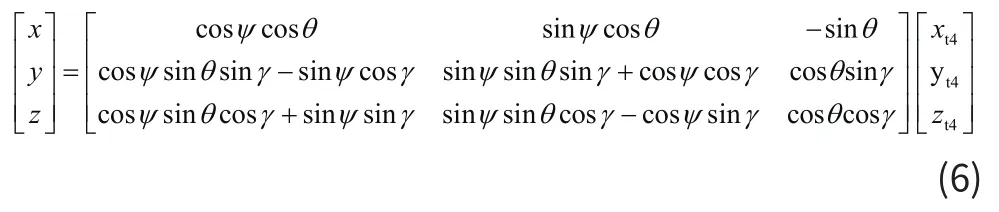
由(6)式,则可解算出雷达辐射源两轴伺服转台的方位指令α和俯仰指令β[14]分别为:

3 靶载设备标校原理
雷达辐射源靶载设备标校的目的是为了获取发射阵面与伺服转台之间、伺服转台与船体之间的三维姿态初始偏差,以便作为坐标转换时的初始化角度, 包括零位标校和靶载设备三轴(光轴、电轴和机械轴)的一致性标校。标校装置由光学瞄准镜、标头、喇叭天线等设备组成。
■3.1 零位标校
靶载设备天线阵面在进行方位和俯仰校准前,首先要对钢制靶载设备转台进行调平操作。考虑到船体在停泊码头存在姿态变化难以进行精确标校,对于伺服转台和三维姿态测量设备采用岸基标校,固连安装平台后整体吊装的方式进行。由于采取固连方式,整体吊装于船体后,不会改变两者的相对位置,即不会破坏岸基标校结果,同时也降低了对设备的安装要求。
方位零位标校。利用光学瞄准镜对转台设备进行方位标校,并通过软件装订伺服转台零位位置。标校时,光学瞄准镜装在伺服转台上,在结构设计上保证其安装轴线与转台零位线平行。利用两处已知地标,地标A和地标B相距1km左右,伺服转台位于在A处,地标B处树立标校板。在地标A通过光学瞄准镜将转台设备对准B处的标校板,通过解算标校板上的十字标志与光学瞄准镜的连线与正北的夹角,实现转台设备方位零位的标校。
俯仰零位标校。俯仰标校是在转台俯仰支臂上安装一水平仪,并通过计算机控制俯仰支臂转动,直至支臂上的水泡位于水平仪的中间位置,此时通过软件装订零位位置。
■3.2 三轴一致性标校
对天线阵面的机械轴、光轴和电轴的一致性标校可在方位标校完成后利用上述两处地标进行。通过测量天线电轴与光轴(代表机械轴)之间的固有偏差,并将此固有偏差加入至天线指向解算模块,从而利用软件修正的方式实现天线波束最大增益方向的精确指向控制。在实际标校操作时,标头与标校喇叭固连,安装在标校望远镜轴线的延长线上,且标校望远镜与阵列天线的相对位置需与标校喇叭与标头的相对位置一致。标校望远镜对准标头,即意味着阵列天线对准了标校喇叭天线,控制转台利用喇叭天线接收的信号幅度变化确认天线电轴与机械轴之间的固有偏差,并以软件修正或者天线安装位置调整的方式完成阵列天线的机械轴、光轴和电轴的一致性标校。
4 结束语
通过对雷达辐射源靶载设备的天线阵面进行零位标校和三轴一致性标校消除安装误差,在海试中系统的雷达控制与计算机分系统将实时无线接收的目标大地坐标系实时位置,经过多次坐标转换,获得反舰武器在船体坐标系下的实时坐标位置,再向伺服传动分系统下发转台的方位和俯仰跟踪控制指令,从而实现发射天线波束的动态对准跟踪,有效隔离船体的海上实时姿态变化和弹目相对运动。在反舰武器海上飞行试验中雷达辐射源利用此技术解决方法,成功完成了靶标保障工作。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
导航定位学报(2022年2期)2022-04-11
语数外学习·高中版中旬(2021年11期)2021-02-14
中学科技(2018年6期)2018-09-21
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
小学生时代·大嘴英语(2015年7期)2015-11-23
中学科技(2015年1期)2015-04-28
为了孩子(孕0~3岁)(2009年6期)2009-07-15
阅读(中年级)(2009年4期)2009-04-16