
卫星通导一体化技术及其在探月中的应用
2021-07-02 04:26谢浩然詹亚锋王晓伟
深空探测学报 2021年2期
谢浩然,詹亚锋,王晓伟,陈 曦
(1.清华大学 电子工程系,北京 100084;2.北京信息科学与技术国家研究中心,北京 100084)
引 言
随着“万物互联”时代的到来,在正确的时间、正确的地点传递正确的信息已经成为基本需求。通信卫星和导航卫星在其中发挥了重要的作用,无论是生产、军事还是人们的日常生活,离开通信卫星和导航卫星的辅助将变得不可想象。为了达到高精度的导航,人们要付出巨大的代价,目前GPS导航星座有32颗卫星,北斗三代卫星星座有35颗卫星,构建、发射和维护这些卫星都代价不菲[1-3]。现有导航卫星的信号容易被干扰,且在特种场景下(如地下、月球表面等)信号无法覆盖,而通信卫星的信号带宽更宽、功率更大、方向性更强、应用面更广[4],将通信卫星的信号分配一定的资源用于导航,实现通信导航一体化[5],无论对卫星导航技术的突破亦或对卫星通信技术的进步,都有着理论意义和应用价值。
20世纪90年代Noreen等[6]提出了通导一体的概念。通信卫星发送通信信号,导航卫星发送导航信号,采用一种简易的圆极化天线同时接收导航和通信信号[7],集成卫星广播、寻呼、双向通信和导航等功能。但其本质上是两条链路分别传输信号,只是简单地将导航通信共同使用,并不是真正的融合。
近年来,北斗卫星已经实现了通信、导航两种信号的传输,在为用户提供导航服务的同时提供双向短报文通信服务[8-9]。虽然北斗系统已经具备了通导一体化的雏形,但其通信系统和导航系统是相对独立的两个子系统,并且所提供的短报文通信能力已无法满足日益增长的通信需求;目前在大部分卫星测控通信系统中也具备了通信导航一体化的功能,其不仅可以传输测控信息,还可以测量卫星与地面站之间的距离,也可以为卫星授时,但是授时精度非常有限,距离真正的通导一体还存在着一定的差距[10]。
随着人类对空间利用和深空探索的不断深入,如何利用现有的卫星通信系统实现空间通信和导航,使航天器、用户在地月空间甚至太阳系空间中实现自动组网、自主导航、宽带通信,已成为航天科技和信息科技未来发展的主要焦点之一。
本文在介绍现有通导一体系统并分析其能力不足的基础上,提出了一种基于卫星通信的通导一体架构及其关键技术,可在完成通信的同时,提供高精度的定位和授时服务,并以未来的载人登月作为背景,给出了利用月球中继通信系统实现月面导航的案例,最后对通导一体技术的未来发展给出了建议。
1 基于卫星通信的通导一体化系统
北斗卫星系统一共由35颗卫星组成,其中30颗运行在非静止轨道上,5颗运行在静止轨道上,其不但可以为用户提供和GPS系统精度相当的定位导航和授时服务,同时还能提供类似于通信卫星的双向短报文服务,是全球首个在导航卫星上实现通信的系统[9]。但其通信传输还存在如下不足:①通信间隔时间长、可申请核准的报文长度受限,通信灵活性受到较大的制约;②通信均需要利用地面中心站进行转发,所需的时延较大,平均约为4 s;③通信资源非常有限,无法提供语音和宽带数据业务,难以满足用户日益增长的通信需求。
卫星测控通信系统是为卫星传输测控数据、话音、图像及提供标准时间、频率等信息的专用通信系统,其可以在地面站与卫星进行通信的同时测量卫星与地面站之间的距离,并为卫星进行授时,是目前在通信系统中实现的通信导航一体化[11]。
美国国家航空航天局(National Aeronautics and Space Administration,NASA)拟构建基于月球中继卫星的导航和通信系统C&N[12]。该系统包括月球中继卫星(Lunar Relay Satellite,LRS)、月球通信站(Lunar Communications Terminal,LCT)、用户接收机和地面地基系统。C&N期望利用在轨的两颗12 h椭圆倾斜轨道LRS和位于着陆区附近的2个LCT对月面用户提供导航服务。每个LRS可以连续广播自己的星历、位置、时钟模型和其它辅助信息,通过伪随机(Pseudo-random Number,PN)序列进行测距,利用不同频段传输不同信号,同时实现低速率通信和对月面用户的跟踪。
1.1 测距及授时方案
现有的卫星导航系统通常采用单向测距的方法对目标进行定位,用户按照一定的模型自主计算单向传播时延,路径上的各种误差均会对时延的估计产生影响,从而降低最终定位的精度。与传统的单向测距,双向测距的发射路径与接收路径基本相同,且方向相反,可以最大程度消除传播路径误差的影响,实现两终端之间的精密测量。用户与卫星之间的通信本身就是一个双向的过程,因此本文利用卫星通信信号的“双向”特性开展了基于卫星通信的通导一体系统设计,可以在高精度测距的同时实现时间同步。
本文所提出的基于卫星通信的通导一体系统是一种连续数据传输系统,其基本原理如图1所示。当授时信源为地面锚固站时,授时信宿可以为卫星;当授时信源为卫星时,授时信宿可以为卫星,也可以为其它航天器、用户终端等。
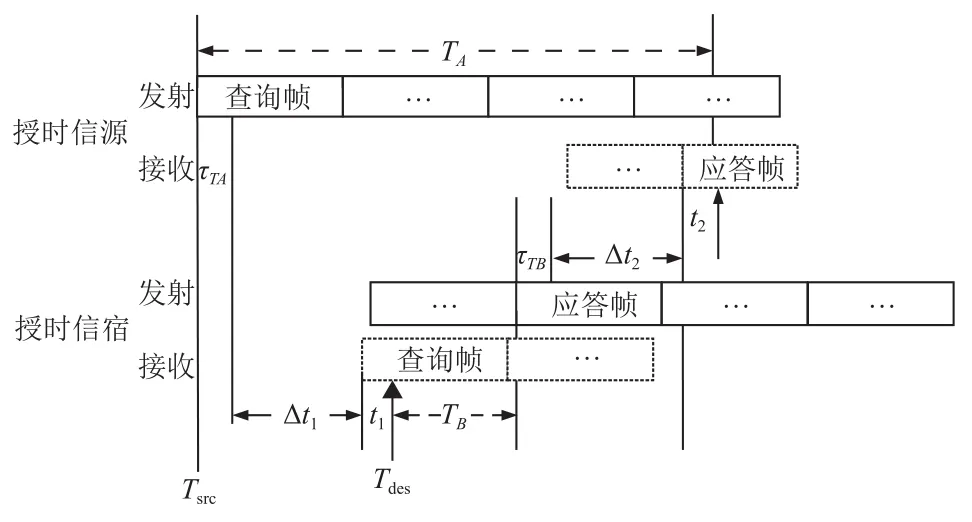
图1 基于卫星通信的通导一体系统测距及授时方案框图Fig.1 Diagram of ranging and timing in integrated communicationnavigation system based on satellite communication

虽然上述4个发送信道或接收信道的时延可以通过标定得到,但解调器定时恢复的抖动会对输出相关峰的位置造成随机抖动,从而引起一定的标定误差。信源和信宿之间钟差的计算可以通过授时信宿本地的绝对时间和授时信源的绝对时间以及星地延时计算得到。授时信源发送查询帧的帧内包含授时信源本地的绝对时间Tsrc,授时信宿发送应答帧的帧内包含收到查询帧的相关峰的绝对时间tdes(即图1中的箭头位置),因此,信源信宿之间的钟差可由授时信源或授时信宿通过式(2)计算得到


查询帧和应答帧的帧结构如图2所示。图2中前导码用于实现时钟同步和比特流同步;源端编号用于指示授时信源;目的编号用于指示授时信宿;帧编号用于帧计数,同一轮次的查询帧和应答帧的编号一致;帧体由待发送的数据、帧校验序列、独特字组成,其中帧校验序列用于检测或校验数据传输中可能出现的错误,独特字用于信道均衡保护和相位跟踪,m个数据帧中,第1个数据帧用于授时帧传输,后面m–1个用于业务数据传输。
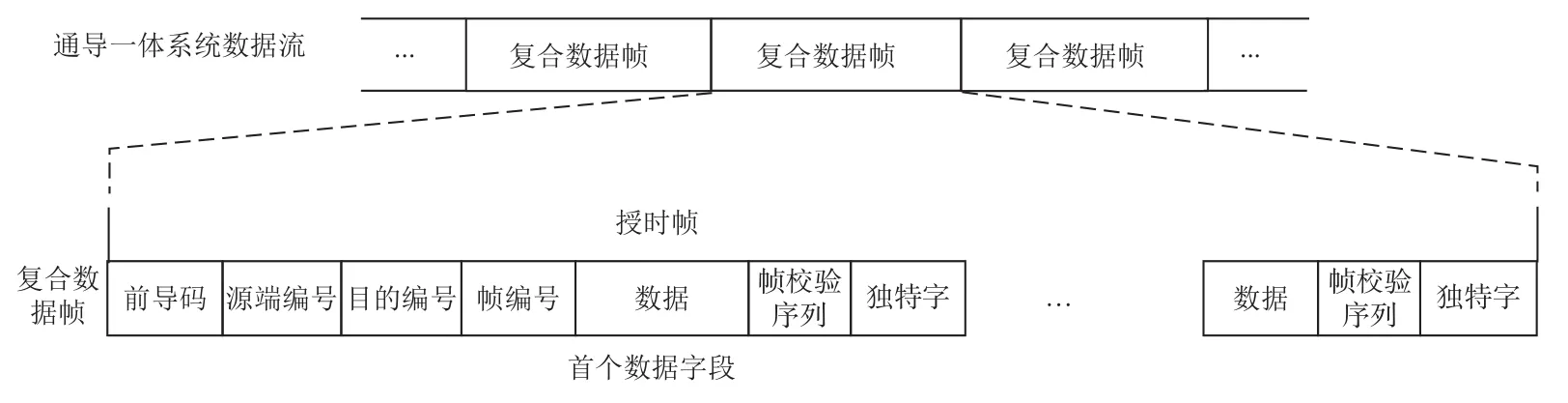
图2 基于卫星通信的通导一体系统帧结构示意图Fig.2 Diagram of frame structure based on integrated communication-navigation system
在测距及授时的相关方法中,现有的双向距离和钟差测量方法要求两个通信节点同时发送测距帧,并假设测距信号在两个通信节点的发射设备和接收设备中传输时延,以及两个通信节点之间的钟差在双向路径上传播时相同[13]。但是,在实际工程运用中,由于某一通信节点或两通信节点的高速运动,钟差在双向路径上的传播将不再相同,当钟差偏差较大时,将难以满足低误差测距和高精度钟差测量的要求。本文提出的“查询–应答”式距离和钟差测量方案,无需两个通信节点在同一时间发送测距信息,避免了两测距终端因为钟差带来的影响,降低了测量误差,有效提高了距离和钟差的测量精度。
1.2 不同覆盖重数下的用户定位方案
对于卫星通信网中的用户,可以利用其与不同卫星之间的通导一体信号来进行导航,包括时钟误差的测量及修正、用户位置的确定。本节重点讨论在不同信源覆盖重数下用户的定位方案。
1.2.1 三重覆盖下的定位方案
采用传统GNSS导航卫星系统对用户进行定位,至少需要4颗以上的可视GNSS卫星。对于本文所提的通导一体测距及授时方案,用户在得到与通信卫星伪距的同时,可以解算出自己与卫星之间的钟差∆ti,因此利用通导一体系统进行导航定位最少仅需3颗可视的通信卫星即可,如图3所示。
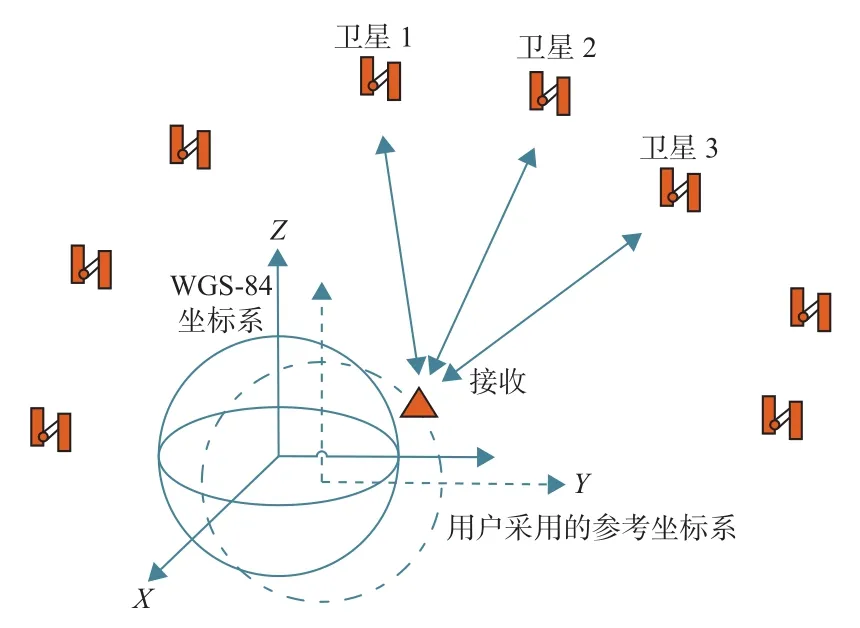
图3 基于卫星通信的通导一体系统三重覆盖下定位方案Fig.3 Scheme of positioning in triple covering multiplicity based on integrated communication-navigation system
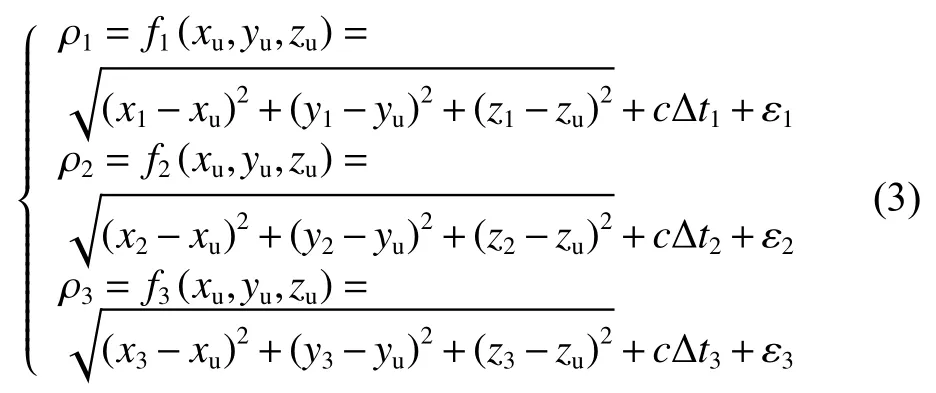
假定通信卫星i是可视范围内可与用户建链的卫星,对于每颗卫星的位置,用户均可通过通导一体信号广播的星历得到,Ri为卫星i到用户之间的距离,由于卫星通信信号在传播过程中会受到来自电离层和对流层产生的大气延迟、多径效应、接收机相关峰抖动、钟差测量误差等影响,因此求得的距离并不为实际的 Ri,记该测量值为伪距ρi。假设用户与卫星1~3进行双向测距授时,得到联立的方程组



则方程组(7)可表示为

通过解算上述三元一次方程组,可得

1.2.2 单重/双重覆盖下的定位方案
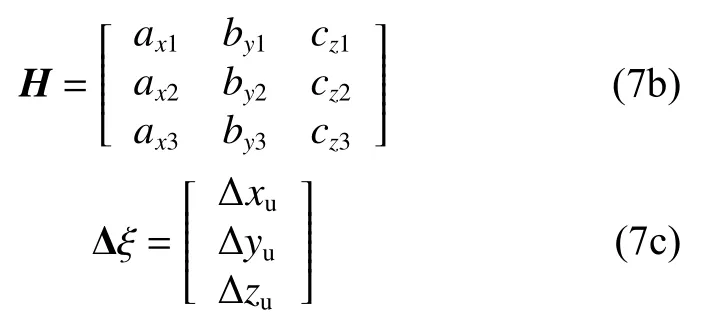
虽然在三重覆盖下的用户定位精度较高,但用户同时和3颗卫星建链的代价较大,实际工程应用中往往只会和1~2颗卫星建链。双重覆盖下,用户和两颗卫星进行双向测距和授时,计算出自己与建链卫星之间的钟差;如果要得到用户的三维坐标,必须借助其它辅助手段测定用户所处地面的大地高(如通过测量用户所在位置的大气压反演出大地高),如图4所示。
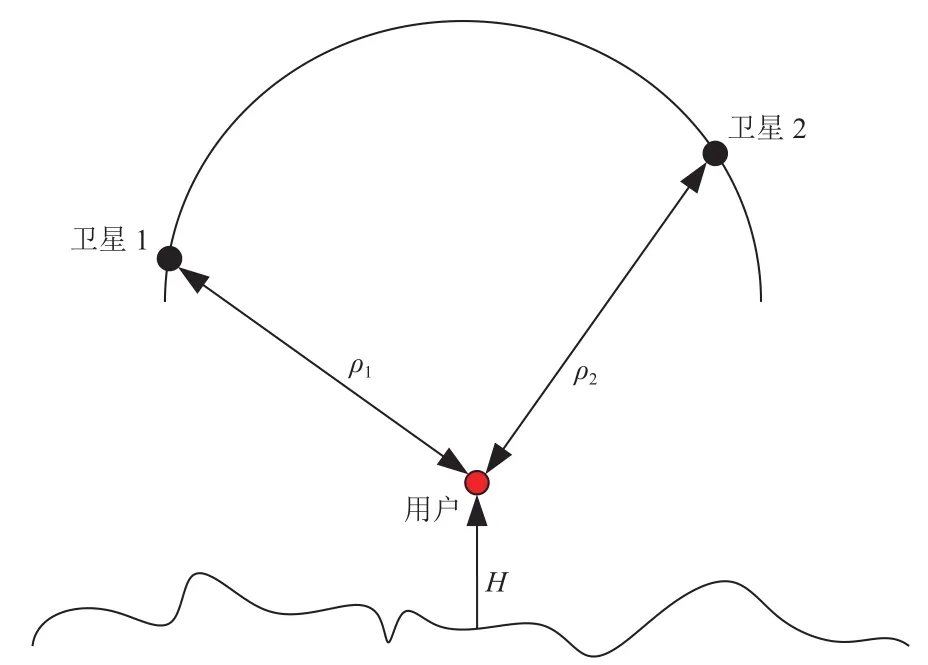
图4 基于卫星通信的通导一体系统双重覆盖下定位方案Fig.4 Scheme of positioning in double covering multiplicity based on integrated communication-navigation system
基于卫星通信的通导一体系统在双重覆盖下的用户定位解算可以采用经典的相似椭球法[15],如图5所示。
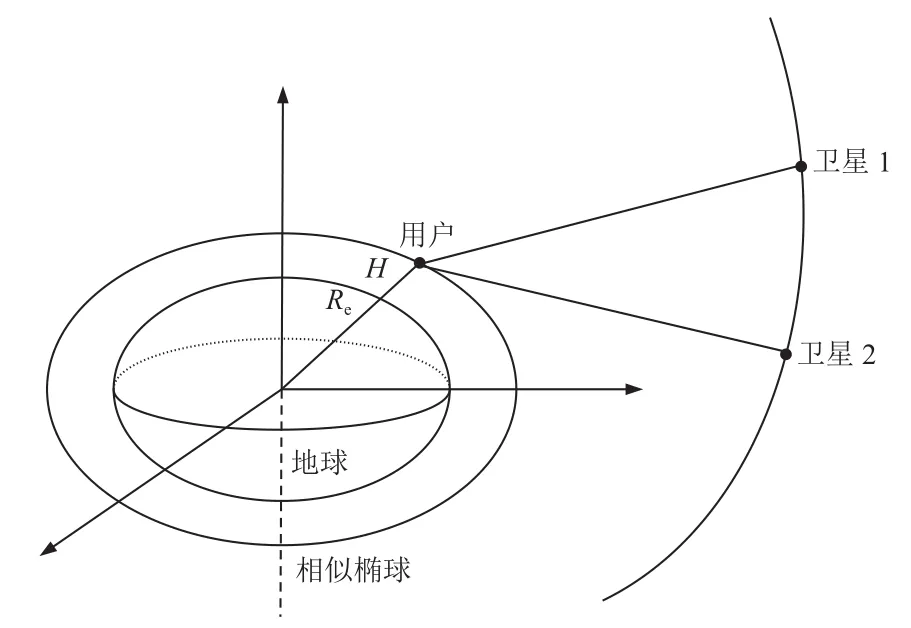
图5 相似椭球法示意图Fig.5 Diagram of similar to ellipsoid method
用户在相似椭球上满足如下方程

记地球的半长轴为ae,半短长轴为be,卯酉圈曲率半径为 Ne,相似椭球的半长轴为a,半短长轴为b,H 为用户测得的高程,e 为地球子午圈偏心率,由相似性可得

由此可得到相似椭球法的3个方程为
其中:φ 为高程测量误差。
在进行定位解算时,利用泰勒级数将其在近似位置处展开,并去掉二次以上的高次项,则式(12)可表示为下述方程组的形式
将式(13)和式(14)利用矩阵的形式描述
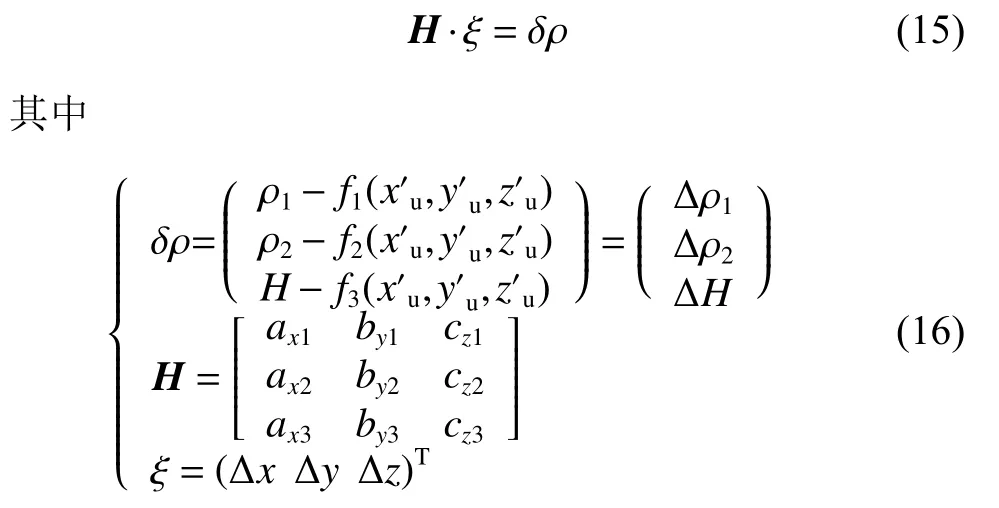
解算上述三元一次方程组,可得

通过ξ 可以更新用户位置坐标新的估计值,如果定位精度未达到预先设定,即ξ≥预定精度,则重新迭代上述过程,直至定位精度达到预先设定需求。
在单重覆盖下,除了需要知道卫星和用户之间的伪距值、用户所处地面的大地高,还需要另一个观测量才能对用户进行有效定位。随着卫星的高速移动,用户与卫星之间会因为相对运动的存在而产生多普勒频移,构成等频锥面[16],如图6所示,由此可构建新的观测方程。
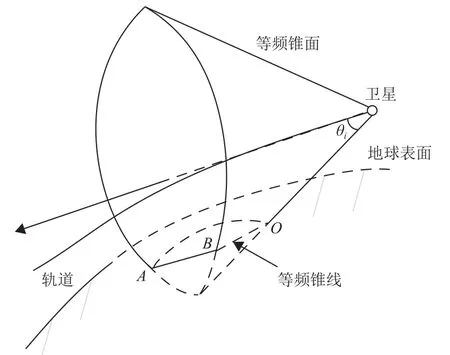
图6 等频锥面示意图Fig.6 Diagram of equal frequency conical surface

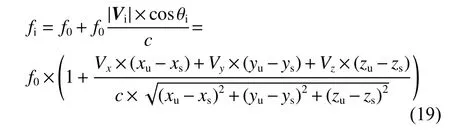
其中:其中Vi为卫星的速度;θi为卫星和地面用户连线与卫星速度方向的夹角。
结合双重覆盖得到的结论,单重覆盖的3个方程为
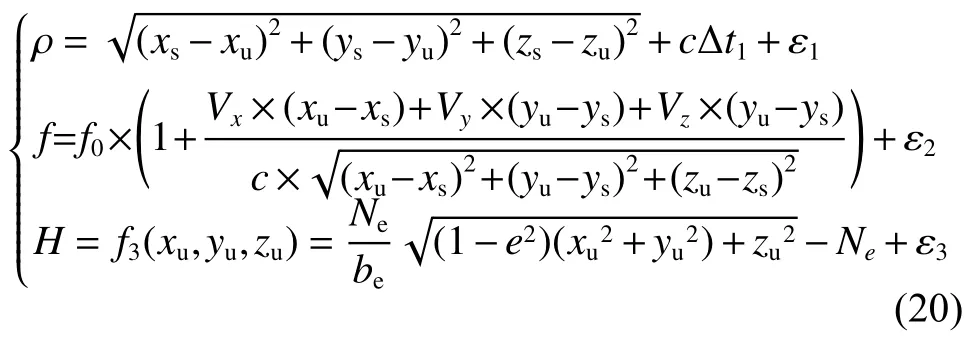
其中:ε1为接收机热噪声、处理时延标定、接收机相关峰抖动等导致的测距误差;ε2为测频噪声误差;ε3为气压计或数字高程模型引入的高程测量误差。
在进行定位解算时,利用泰勒级数将其在近似位置处展开,并去掉二次以上的高次项,利用矩阵的形式可以描述如下
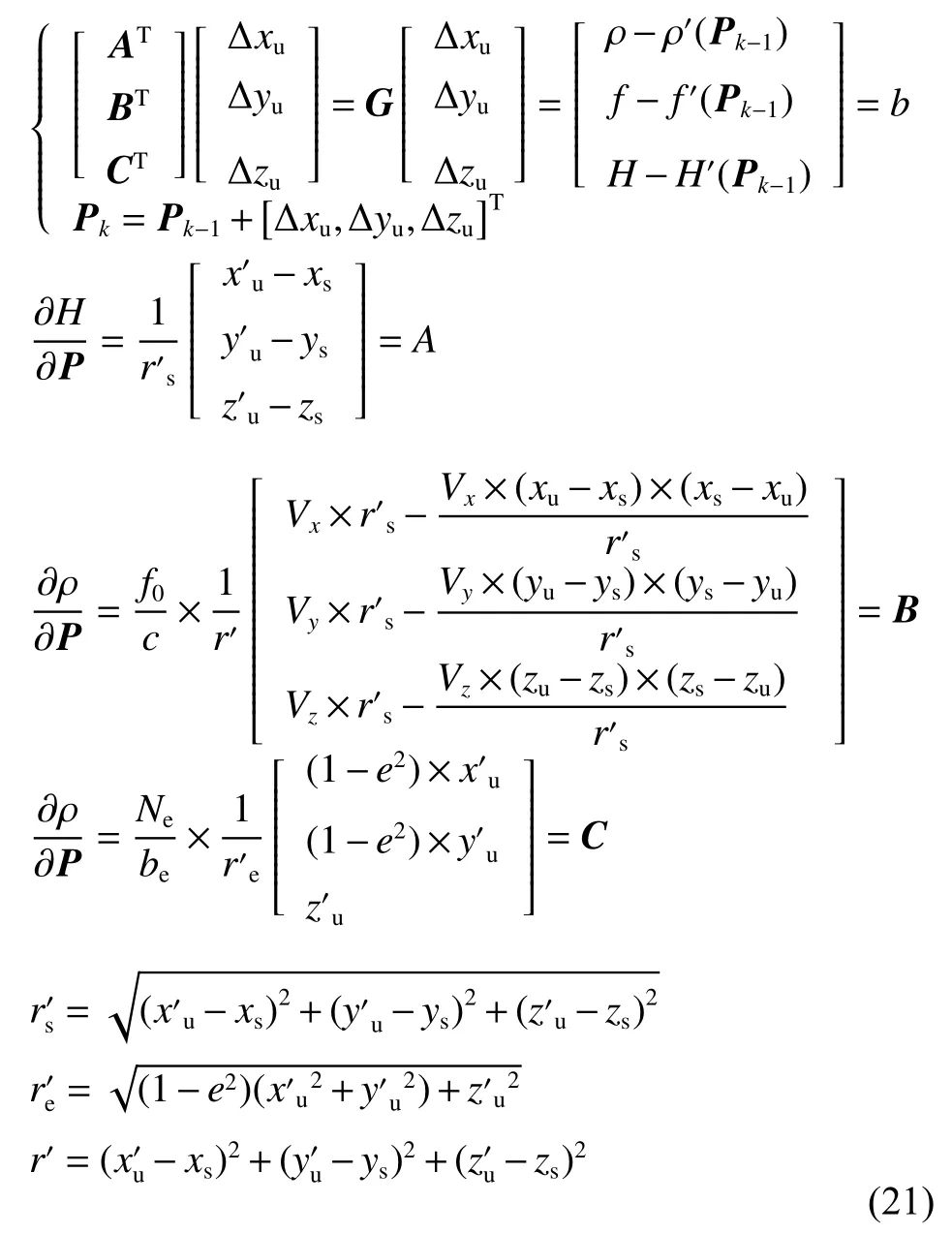
其中:P是地心地固坐标系下地面用户的空间坐标。解算上述三元一次方程组,可得

2 通导一体的月面中继通信系统
月球作为人类进入深空的前哨站,载人探测的意义重大,但其能实施的前提条件是可以为月面的宇航员和月球车提供全程通信和导航服务。我国现有的地面深空测控网可以为月面探测目标提供90%左右的测控弧段,不能全时段、快速准确地支持宇航员获取自身位置的三维坐标,不能完全满足未来月球开发的需求,特别是复杂的探月活动,如寻找前期发射的月球车、进行月面上长距离的探测、建立月球基地等。
2.1 月面中继通信系统设计
本文所提出的通导一体月面中继通信系统由地球深空站、地月拉格朗日L1点卫星、绕月轨道器3个部分构成,如图7所示。3个部分通过一体化的网络紧密连接在一起,用户在不同的阶段可以自行选择相应的单元完成通信和导航任务。由于采用一体化的思想,用户可以“平滑”地从一个单元过渡到另一个单元,具有很好的灵活性和冗余度。
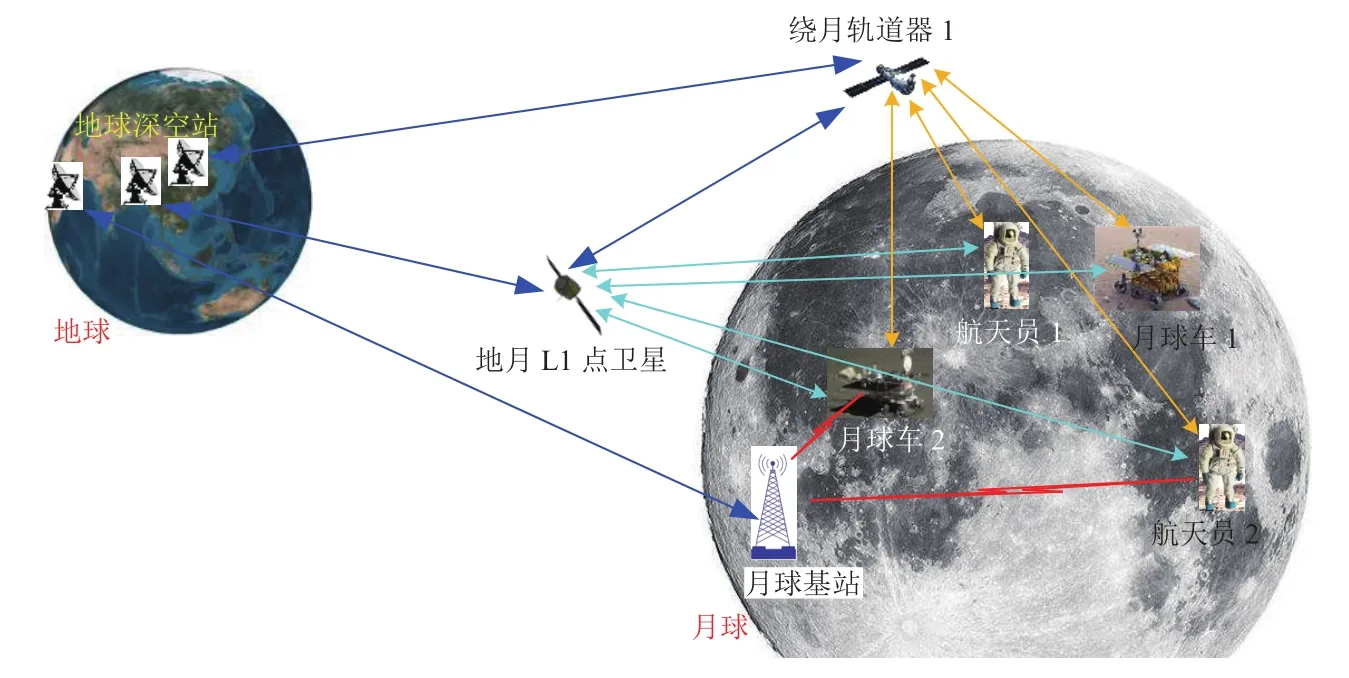
图7 通导一体的月面中继通信系统示意图Fig.7 Diagram of lunar relay communication system based on integrated communication-navigation system
本方案建议在运载火箭发射阶段、地球轨道环绕阶段、奔月过渡阶段可以使用地球深空站进行测控通信和导航;在初始环月轨道机动段,采用地球深空站与地月L1点卫星相结合的方式进行测控通信和导航;一旦月球探测器抵达环绕轨道,主要的测控通信和导航则由地月L1点卫星提供;在软着陆及着陆后各种复杂的探月活动期间,月面目标可以通过2个绕月轨道器或1个绕月轨道器与1个地月L1点卫星相结合的方式完成测控通信和导航,在地球深空站与月面目标可视时,通信和导航可以通过多链路实现,测控和通信任务由与地球建立的主干通信链路完成,导航任务由月面目标和绕月轨道器之间的前、返向通信链路完成。
以两颗绕月轨道器对宇航员提供通信及导航服务为例进行性能仿真,当绕月轨道器和宇航员可视时,绕月轨道器在通信的同时主动发起时频传递,每隔400个数据帧发送一个查询帧,并等待接收来自宇航员的应答帧,宇航员接收到查询帧并检测到帧头相关峰后,在最短时间内回复应答帧。通过1.1节设计的测距授时方案,宇航员可以得到相应的伪距和钟差信息,基于1.2节双重覆盖下用户的定位方案完成定位解算。
2.2 仿真结果及其分析
具体的仿真参数如表1所示。本文假定电离层和对流层产生的大气延迟、多径效应、高程测量误差均已通过建模精确修正,仅考虑钟差测量、处理时延测量、接收机相关峰抖动、定轨误差带来的影响。
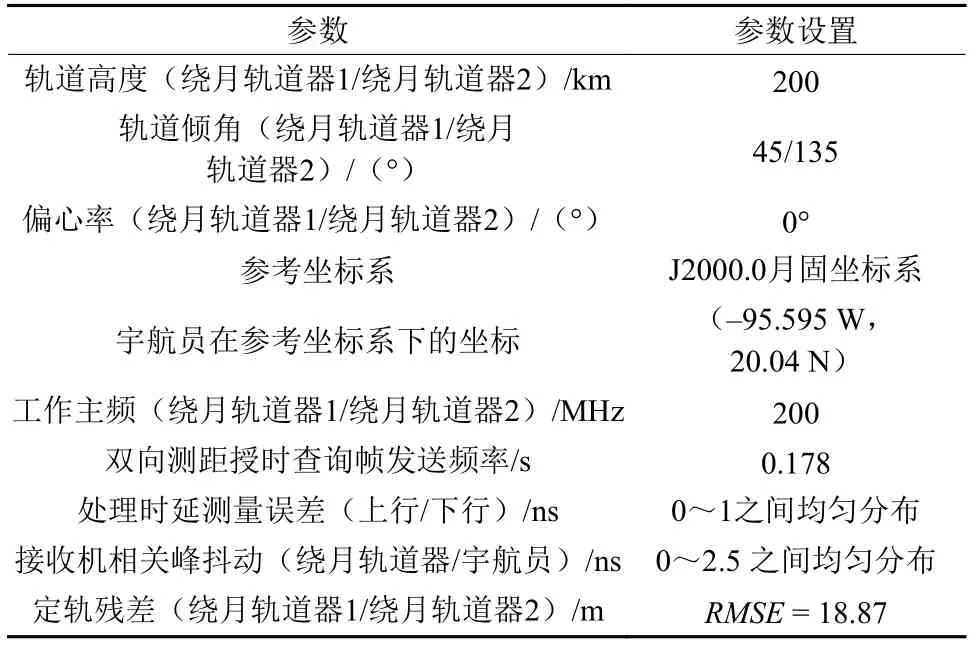
表1 仿真参数Table 1 Simulation parameters
月球环绕器在双重覆盖下对月面目标进行导航定位的结果如图8所示,时频传递性能如图9所示。同时对月球环绕器不同定轨精度下月面用户的定位能力进行了仿真,如图10所示。
从图8可以看出,三轴误差均能够较好地收敛,X方向的误差在–5~10 m之间,Y方向的误差在–14~20 m之间,Z方向的误差在–20~20 m之间;水平定位偏差的均方根误差约为2.77 m,三维定位偏差的均方根误差约为3.65 m,具体统计结果如表2所示。从图9可以看出,利用通导一体月面中继通信系统对月面目标进行授时,系统与月面目标之间的钟差不会超过20 ns,最大值为18.6 ns。仿真结果表明,通导一体月面中继通信系统对月面目标进行授时和导航定位有很好的可行性。从图10可以看出,随着定轨残差的增加,水平定位和三维定位均方根误差也逐渐增大,但即使在定轨残差达到100 m的时候,水平定位偏差和三维定位偏差的均方根误差均未超过20 m。
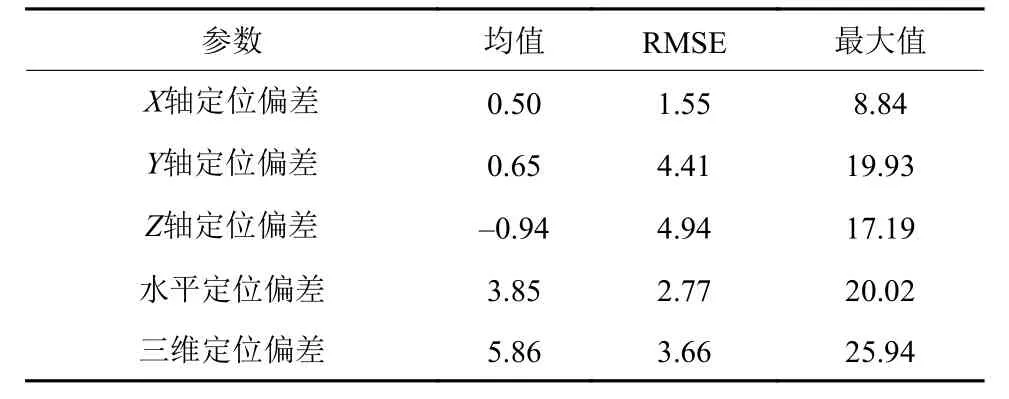
表2 通导一体月面中继通信系统双重覆盖下用户位置解算偏差Table 2 Positioning bias in double covering multiplicity based on lunar relay communication system
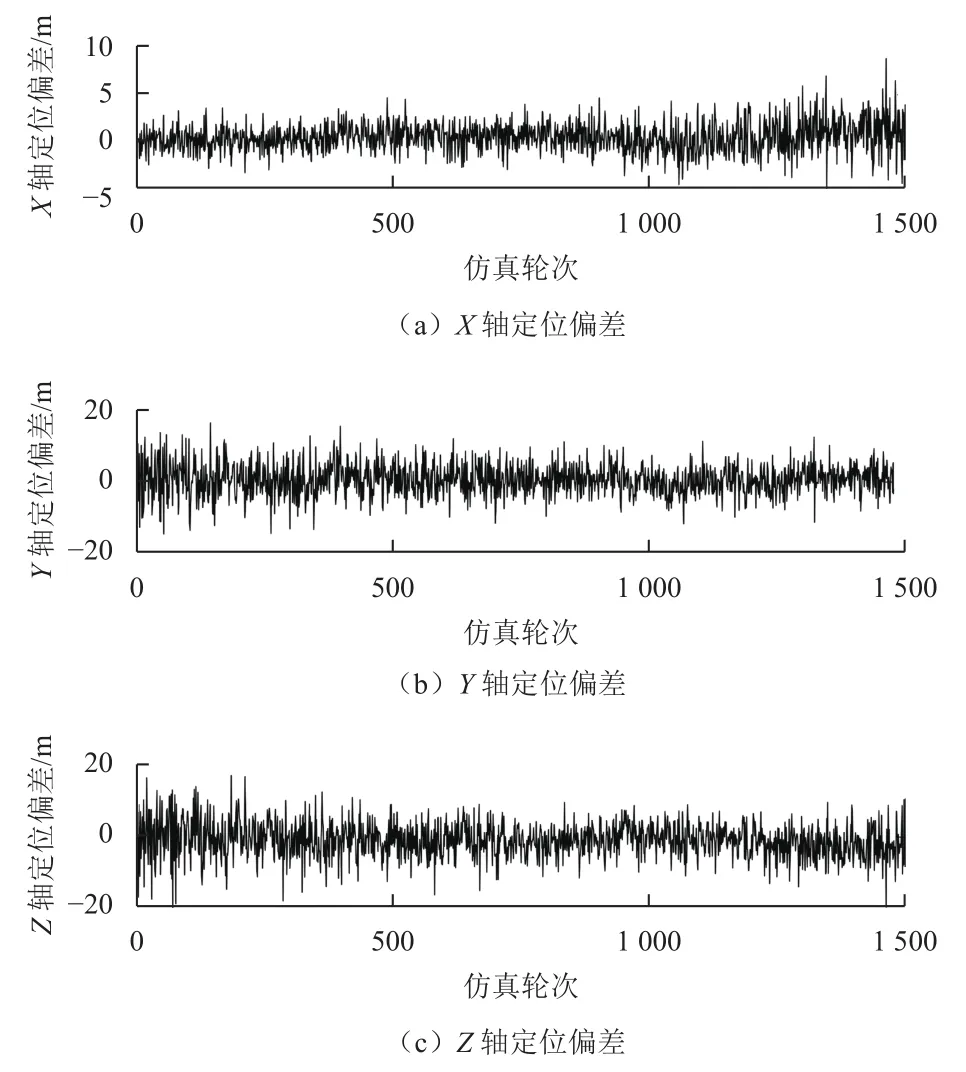
图8 通导一体月面中继通信系统在双重覆盖下对月面目标进行导航定位结果Fig.8 Positioning results in double covering multiplicity based on lunar relay communication system
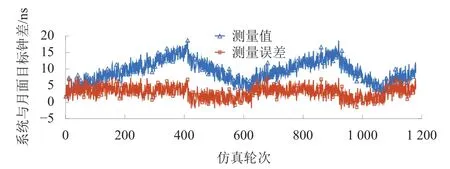
图9 通导一体月面中继通信系统双重覆盖下对月面目标授时结果Fig.9 Timing results in double covering multiplicity based on lunar relay communication system
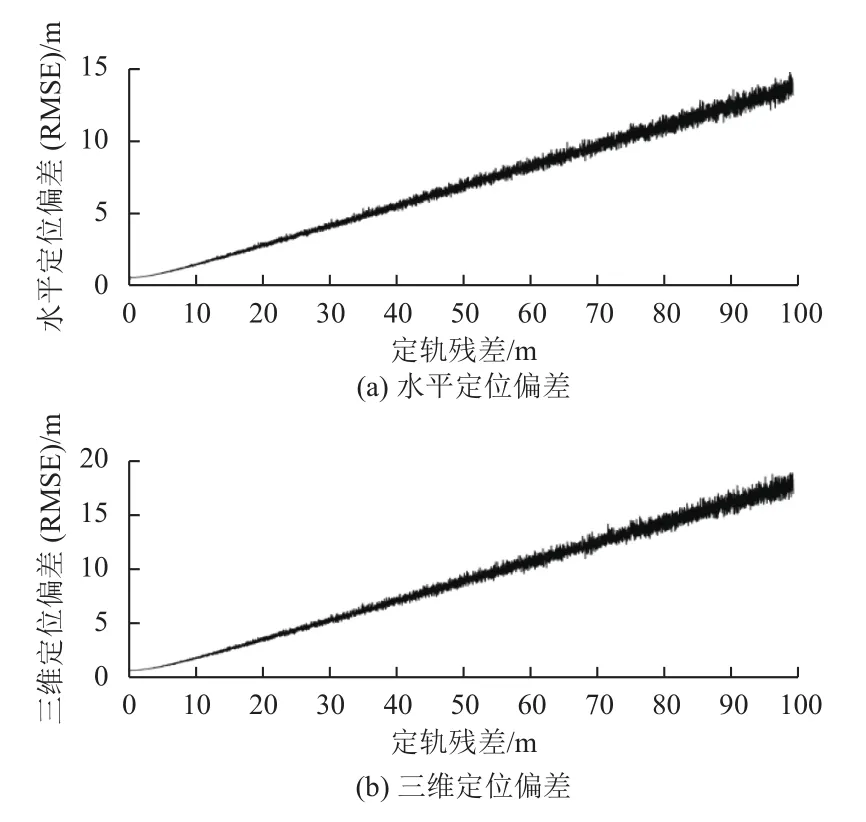
图10 通导一体月面中继通信系统在不同定轨精度下对月面目标导航定位能力Fig.10 Positioning results in different precision of orbit determination based on lunar relay communication system
在此基础上,本文对单重覆盖场景也进行了性能仿真,以验证在突发情况下系统的服务能力,仿真参数与双重覆盖下相同(见表1所示。月球环绕器1在单重覆盖下对月面目标进行导航定位的结果如图11所示。仿真结果表明,相较于双重覆盖的情况,定位解算结果精度较低,但仍能满足一定的定位需求。
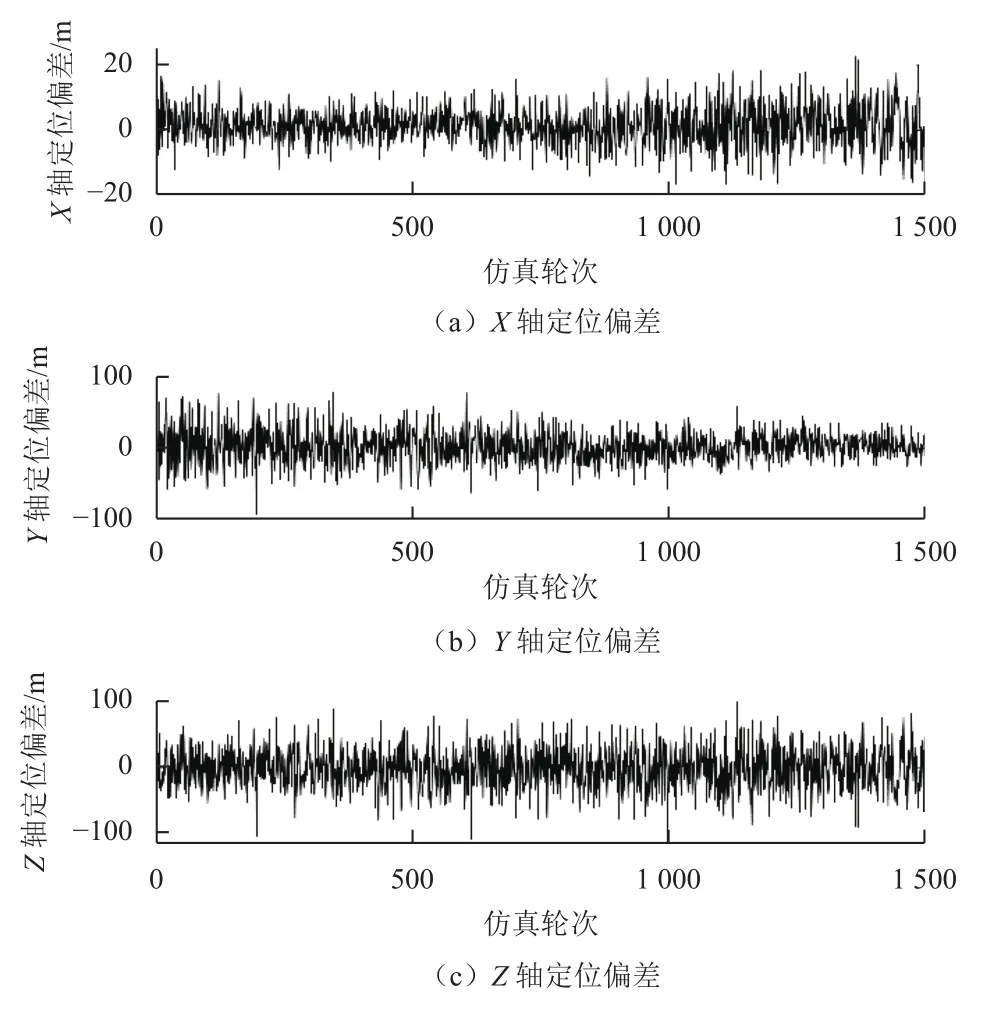
图11 通导一体月面中继通信系统在单重覆盖下对月面目标进行导航定位结果Fig.11 Positioning results in single covering multiplicity based on lunar relay communication system
本文利用现存的地面测控网络和月球中继系统,减小了构建、发射和维护月球导航卫星的费用;通过双向距离和钟差测量,最大限度地消除传播路径误差的影响,使得时频传递精度可达ns量级,并可实现在单/双重覆盖下的导航定位;采用的“查询–应答”式的测量策略,无需授时信源和授时信宿在同一时刻发送测距信息,避免了收发测距终端存在的潜在风险,有效地提高了距离和钟差的测量精度。宇航员可以在不接收地面指令的情况下实现自我定位、自主导航,大大提高了宇航员在月面的活动范围以及处理各种意外情况的灵活性。
3 结 论
本文对现有通导一体系统的发展现状进行了简述,分析了其在通信或导航能力上存在的不足,基于现有卫星通信系统提出了一种新的通导一体架构及其关键技术,并介绍了该架构在三重覆盖和单/双重覆盖下的用户导航定位方法,最后以载人登月为背景,给出了利用月面中继通信系统实现通信、测控、导航的设计案例并进行了性能仿真。结果表明,利用通导一体月面中继通信系统对月面目标进行导航定位有较高的精度,可用于未来载人登月信息系统的设计。
随着通信卫星星座的蓬勃发展,借助于卫星通信信号开展通导一体服务将成为通信卫星星座一个重要的特色和赢利点,有必要提前布局。由于通信导航一体化系统的定位精度和服务容量之间存在相互制衡的关系,在单星定位时,系统总容量最大而用户定位精度较低;当采用多颗通信卫星进行导航时,虽然精度有所提升,但容量迅速下降,未来需要结合用户等级和需求探索高效的资源调度模式。此外还可深入研究时频传递原理和定位解算方法,以提升单/双星覆盖下的定位精度。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
无线电通信技术(2020年1期)2020-01-15
无线电通信技术(2019年1期)2019-12-24
导航定位学报(2018年3期)2018-09-03
载人航天(2016年4期)2016-12-01
中国科技纵横(2016年14期)2016-10-10
航天器工程(2015年3期)2015-10-28
太空探索(2015年1期)2015-07-18
太空探索(2014年12期)2014-07-12
太空探索(2014年11期)2014-07-12
