永磁同步电机无传感器技术位置角的优化策略
2021-07-03 03:10陈昌泽冯雅茹
农业装备与车辆工程 2021年6期
陈昌泽,冯雅茹
(200093 上海市 上海理工大学 光电信息与计算机工程学院)
0 引言
永磁同步电机具有结构简单、寿命长、噪声低、性能可靠、功率密度高等优点,使其在电动汽车、交通轨道、医疗器械、家电领域得到广泛应用[1]。随着人们对节能问题的逐步重视,对永磁同步电机的效率提出更高的要求。过去在研究永磁同步电机的过程中发现,电机的效率会随着控制角的变化发生改变,这是因为随着反电动势与相电流相位差的增大,母线电流会相应增大,意味着损耗增加。永磁同步电机无位置传感器技术具有成本低、应用范围广等优点,利用滑模观测器算法又可以确保永磁同步电机在较低速运行时能够获取到转子位置和速度的估算值[2-3]。本文对无位置传感器滑膜观测器控制方式中位置角不准确的问题提出优化方法,实现永磁同步电机在相同负载和电源情况下母线电流最小目标,以改善电机的控制效率。
1 永磁同步电机电磁输出功率分析
永磁同步电机电磁输出功率等于反电动势和相电流的数量积,在负载和转速一定的情况下,永磁同步电机的输出功率恒定。假设反电动势和相电流为正弦波,则反电动势与相电流同相位时的反电动势和相电流为

式中:E——反电动势幅值;I0——反电动势和相电流相位差为零时的相电流幅值;θ——转子位置电角度。
相电流与反电动势同相位时的波形如图1所示。
图1 中,0~2π/3,2π/3~4π/3,4π/3~2π 是从不同的相分析,输出电磁功率相同的区间,选取其中0~2π/3 为分析对象,永磁同步电机的输出功率为

图1 零相位差时相电流与反电动势波形Fig.1 Phase current and back EMF waveform with zero phase difference

式中:P0——反电动势和相电流相位差为零时的电磁输出功率。
反电动势与相电流相位差为σ时的反电动势和相电流为
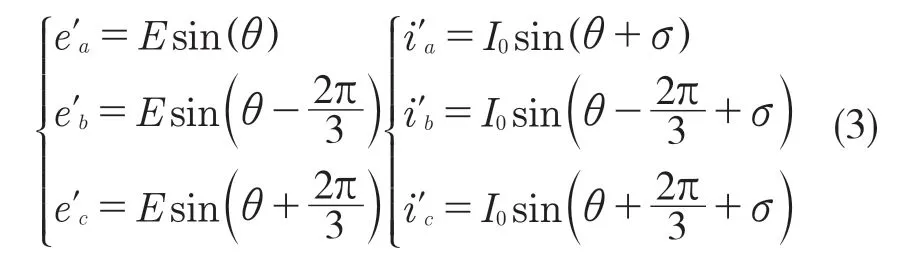
式中:Iσ——反电动势和相电流相位差为σ时的相电流幅值;σ——反电动势和相电流的相位差。σ超出一定范围时,电机无法正常运转。
相电流与反电动势相位差为σ时的波形如图2 所示。
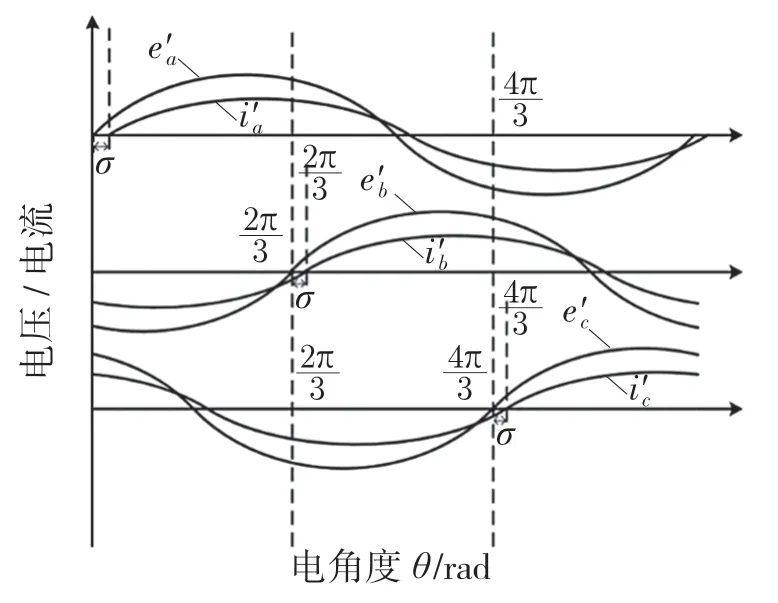
图2 相位差为σ 时相电流与反电动势波形Fig.2 Phase current and back EMF waveform with phase difference of σ
同理,取图2 中0~2π/3 为分析对象,当反电动势和相电流相位差为σ时永磁同步电机的输出电磁功率为

2 基于母线电流的转子位置补偿算法
2.1 转子位置观测误差对母线电流的影响
转子位置观测误差会造成相电流和反电动势的相位偏差,而相电流和反电动势的积分值是电机控制系统的电磁输出功率。电磁输出功率恒定的情况下,相位偏差的增加会降低永磁同步电机控制系统的效率。补偿转子位置观测误差可以达到优化永磁同步电机效率的效果[5]。相同电机输出功率的情况下,相电流与反电动势的相位偏差越小,则控制器输入端输入功率越小,输出功率与输入功率的比值越大,反映了补偿项在效率优化上的效果。本文转子位置观测误差体现在反电动势和相电流之间的相位差σ上。磁场定向控制与SVPWM 调制方式下的永磁同步电机的相电流和反电动势都是正弦波,所以,本文都是基于相电流和反电动势为正弦波的情况进行推导和验证。
在转速恒定、负载恒定情况下,永磁同步电机的输出电磁功率恒定,因此有

将式(1)代入式(2),则

将式(3)代入式(4),则

将式(6)和式(7)代入式(5)得到

从式(8)可以看出,当相位差为零也即是反电动势和相电流相位相同时,母线电流最小,其最小值为I0。
根据式(8),在约束条件区间内可以得到图3。

图3 母线电流与相位差的关系Fig.3 Relationship between bus current and phase difference
2.2 转子位置误差补偿方法
由图3 可知,可以根据母线电流的变化推导出相位差σ,设计基于母线电流变化的调节器。以转子位置补偿角δ为输出量,实现滑膜观测器所得转子位置的误差补偿。所设计补偿方式的输出同时也补偿了电感带来的电流滞后等原因而需要考虑的提前角。
假设已经通过补偿值的增减获得了最小电流I0,根据当前电流Iσ并不能判断补偿值的动作方向,从而使得当前电流向最小电流方向移动,但若加入当前电流Iσ在补偿值前一动作时刻的电流及补偿值的变化值,则可以准确判断下一步动作实现电流向最小值移动。因此,以母线电流对相位差σ求导,得到母线电流相对于相位差σ的斜率:

根据式(9)可以得到图4。可知,当误差角为负时,D 为负;误差角为正时,D 也为正。采用D 作为调节器的输入量,可以简单且准确地对补偿值做出调节。

图4 母线电流与相位差σ 变化的斜率关系Fig.4 Slope relationship between bus current and phase differenceσ
通过D 和σ的关系设计PI 调节器如下:

式中:Kp——比例系数;Ki——积分系数。
设定Kp和Ki为正系数时,由图4 知,σ<0 时,D<0,根据式(10)得δ<0,反之同理。于是优化后的转子位置估计值为

实际系统中需对调节器模型做离散化处理,将式(10)离散化后得到

式中:δk——当前补偿值;δk-1——前一时刻补偿值;Dk——当前电流斜率;Dk-1——前一时刻电流斜率;Dnk——历史电流斜率累计。
假设当前电流为Iσk,前一时刻电流为Iσk-1,则调节器输入量为

实际工程中,通过两个不同转子位置估计值及对应母线电流计算得到电流对转子位置的斜率,所以,第一步需要主动对转子位置估计值做一次改变,以得到Dk,从而开始优化过程。加入转子位置估计补偿值的系统结构如图5 所示。

图5 加入补偿环节的SMO 磁场定向控制系统框图Fig.5 Principle block diagram of field-oriented control with compensation link
3 优化控制策略系统仿真
根据图5,搭建了图6 所示的仿真系统。电机参数如表1 所示。将母线电流反馈值输入补偿环节,经过低通滤波器对滤波器输出值进行离散化的求导。当母线电流变化率为零时,将补偿值中加入一个微小值,母线电流不为零时,去掉微小值,并按上述设计方法将母线斜率输入PI 调节器。PI 调节器输出作为补偿值,补偿值中加入转子位置估计值,将补偿后的估计值作为转子位置进行磁场定向控制。
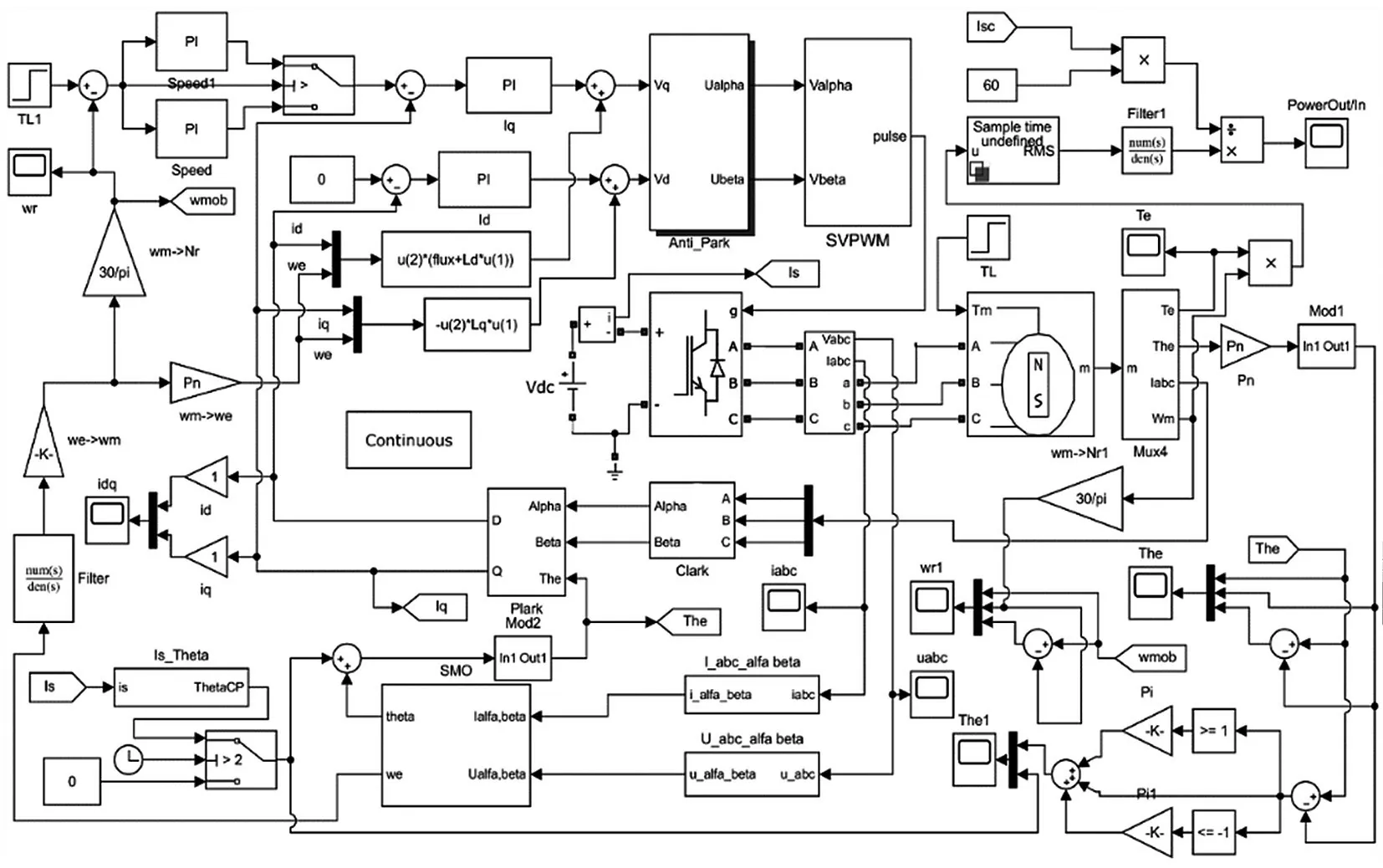
图6 仿真系统图Fig.6 Simulation system diagram
仿真中各参数:定子交流电阻为R=1.8 Ω,定子的交直轴电感为L=0.6 mH,极对数p=3,给定电压60 V,转动惯量为J=0.000 2 kg·m2。仿真初始规定额定转速10 000 r/min,空载启动,在时间1 s 处突加负载0.19 N·m。为了便于观察补偿结果,在突加负载带来的电流变化稳定后,于2 s 时启动补偿环节,仿真结果如图7 所示。
从图7 可以看出,在该控制系统下,转速位置误差得到了补偿。其中,图7(e)是经过低通滤波器后得到的母线的电流值。可以看出在转子位置误差得到补偿的过程中,母线电流的幅值明显减小;图7(f)中母线电流斜率的变化曲线明显,基于此曲线可以肯定本文设计的补偿方法能有效地进行转子位置误差补偿,使得电动势与相电流的相位差尽可能减小,在相同电源、相同负载、电磁输出功率不变的情况下,使得母线电流最小,得到最优的电机运行效率;如图7(g)所示,补偿前电机运行效率为81.7%,加入补偿并且稳定后的电机运行效率为84.0%,效率提升了2.3%
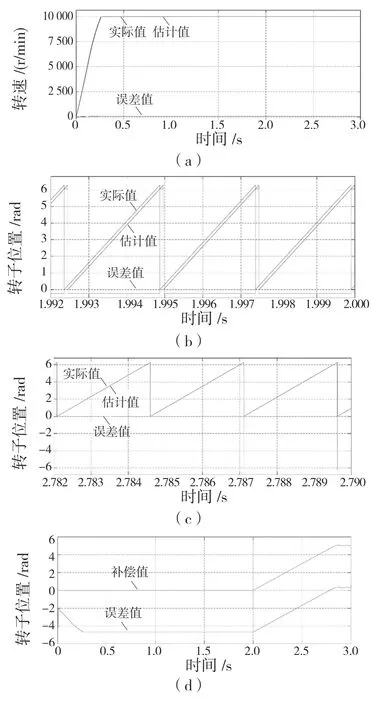

图7 加入补偿项的控制系统仿真结果Fig.7 Simulation results of control system with compensation term
4 结语
本文根据基于电机数学模型的滑膜观测器推测出转速及转子位置,但是由于电机模型参数不准确给电机带来的电流滞后导致观测结果有一定误差,推导出母线电流对反电动势和相电流的相位差的关系,设计了针对误差的补偿环节,并在仿真上得到了验证。仿真结果表明,该方法使用简单,明显提升电机效率。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
微电机(2022年8期)2022-10-12
防爆电机(2022年4期)2022-08-17
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
防爆电机(2022年3期)2022-06-17
微电机(2022年1期)2022-03-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
汽车电器(2019年2期)2019-03-22
科学与财富(2017年30期)2018-01-01