
一种相机标定板姿态变换装置设计
2021-07-08 14:19卢笑宇
南方农机 2021年12期
楚 恒,卢笑宇
(长安大学工程机械学院,陕西 西安 710064)
近年来,人工智能技术风靡全球,机器人、自动驾驶领域飞速发展,视觉系统应用场合对图像识别、目标定位、视觉测量等方面的技术要求也越来越高[1]。虽然目前相机的生产技术已非常成熟,但由于相机透镜存在不可避免的制造误差和装配误差[2],相机拍摄的图像将存在一定的失真,对图像的应用精度造成一定影响[3]。因此,需要在相机使用前利用相机标定板对其内部参数进行标定,求解出镜头的各个畸变参数,根据畸变参数对获得的图像进行畸变校正,获得精确的环境信息,实现高精度的测量、目标定位和图像识别等应用[4]。
1 研究背景
目前,相机标定时,标定板图像的获取方式通常是标定板人工手持固定,标定相机机械固定,采集不同姿态下的标定板图像[5]。该标定板固定方式,易造成拍摄过程中标定板的晃动,对采集的标定图像效果造成一定的影响,降低相机参数的标定精度[6]。相机参数的标定通常需要拍摄10~20 幅不同空间姿态下的标定板完整图像[7],该过程需要至少两位操作人员的相互配合,标定板图像采集过程比较烦琐,且容易拍摄到空间姿态相近的标定板图像,标定图像采集效率较低[8]。
根据相机标定板图像采集要求,利用三维空间自由度约束的性质,设计一种操作简单、多自由度约束定量改变的相机标定板姿态变换装置。
2 设计理念概述
为了实现对标定板在三维空间中多自由度约束定量改变,该标定板姿态变换装置由水平和竖直两个不同方向的旋转装置以及一个竖直方向的升降装置组成。其中,水平旋转装置由一个伺服电机通过一对齿轮定量地控制标定板前后翻转的角度;竖直旋转装置通过将旋转定位杆放置在不同的定位卡槽中,定量地改变其标定板左右旋转的角度;竖直方向的升降装置通过气泵控制升降气筒改变标定板的上下位置。
3 装置结构示意图及工作流程
3.1 结构示意图
标定板姿态变化装置整体由两大部分(底座和移动装置)和四大装置(升降装置、竖直旋转装置、水平旋转装置和标定板固定装置)构成。底座用来固定和安装其他装置,移动装置包括四个可锁万向轮。升降装置包括气泵和升降筒,竖直旋转装置包括可调整的旋转定位杆、定位卡槽,水平旋转装置包括伺服电机、传动齿轮和旋转轴,标定板固定装置包括标定板夹具和固定螺栓。标定板姿态变换装置斜二轴测图如图1所示。
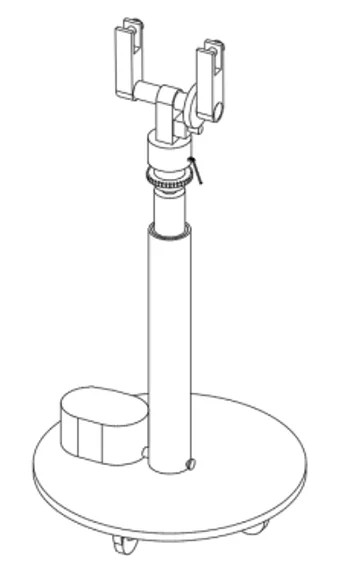
图1 标定板姿态变换装置斜二轴测图
标定板夹具分为左右两个,在夹具末端设有固定标定板的螺栓,可以将相机标定板完全固定在姿态变换装置上;标定板夹具安装在装置水平旋转轴上,该水平旋转轴与伺服电机之间通过一对齿轮副连接,伺服电机轴后端的旋转编码器可保证伺服电机的控制精度,可以通过控制伺服电机对标定板进行前后方向上的翻转。
标定板夹具、旋转定位杆、水平旋转轴以及伺服电机均固定在竖直旋转轴上,竖直旋转轴与升降筒之间通过轴承连接,可以通过旋转定位杆控制标定板左右方向上的旋转,将旋转定位杆置于升降筒上的定位卡槽时,可以将标定板固定在左右方向上的某一角度。
气泵通过控制升降筒的高度改变标定板竖直方向上的位置;装置底座安装有4个万向轮,便于装置随时移动。标定板姿态变换装置正视图如图2所示。
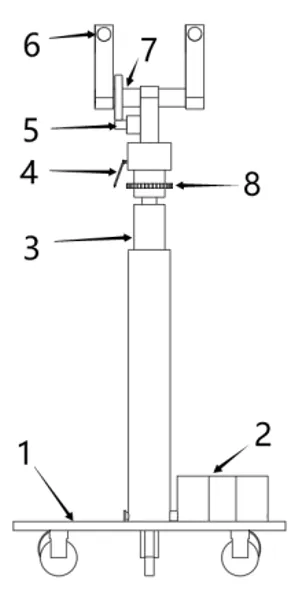
图2 标定板姿态变换装置正视图
3.2 操作流程
将标定相机固定在合适的位置,通过标定板夹具上的固定螺栓,将相机标定板固定在姿态变换装置上,通过安装有万向轮的底座,将装置移动至面向标定相机的合适位置,并将万向轮锁死,防止在标定板图像采集过程中装置发生移动。控制伺服电机旋转,将标定板调整至竖直状态,调整旋转定位杆使标定板平面垂直于标定相机射线,并将旋转定位杆置于定位卡槽中,规定该状态为初始状态。
以获取20 张标定板图像为例。调整旋转定位杆位置,使标定板由初始状态向左旋转5 种角度后,再由初始状态向右旋转相同的5种角度。每次调整角度,必须将旋转定位杆置于相应的定位卡槽中。对上述10个不同空间姿态的标定板进行依次拍摄,得到10 张左右旋转的标定板图像。然后将标定板调整至初始状态并固定旋转定位杆,控制伺服电机使标定板在前后方向分别上下各翻转5种角度,可以得到10张上下翻转的标定板图像。如需改变标定板的高度位置,可控制气泵使升降筒上下升降,得到更多张不同位姿的标定板图像。
4 结语
综上所述,利用该种新型的相机标定板固定和空间姿态变换装置,在对相机标定板进行拍摄图像时,可以根据需要方便地调节标定板空间位置,快速获取不同位姿的标定板图像,提高相机标定效率。该标定板姿态变换装置能够实现相机标定板在3个自由度方向的定量变换,相较于现有的其他相机标定板固定、姿态变换方式,该装置具有结构简单、易操作、效率高的特点,可以为机器视觉科研人员提供较大的帮助。
猜你喜欢
专用汽车(2021年11期)2021-11-18
发明与创新·中学生(2020年1期)2020-08-03
价值工程(2020年13期)2020-05-25
科技创新与应用(2019年23期)2019-09-04
科教导刊·电子版(2019年15期)2019-07-19
今日中国·中文版(2019年1期)2019-01-22
数码世界(2018年3期)2018-12-22
电子制作(2018年17期)2018-09-28
教师·上(2017年10期)2017-12-11
发明与创新·中学生(2016年12期)2016-09-10
