基于改进型ADRC算法的无人水面侦察艇轨迹跟踪
2021-07-12 01:05王晓慧潘玉田
水下无人系统学报 2021年3期
王晓慧, 黄 刚, 丁 洁, 岳 光, 潘玉田
基于改进型ADRC算法的无人水面侦察艇轨迹跟踪
王晓慧1, 黄 刚1, 丁 洁2, 岳 光3, 4, 潘玉田4
(1. 太原工业学院 电子工程系, 山西 太原, 030008; 2. 太原理工大学 电气与动力工程学院, 山西 太原, 030024; 3. 太原工业学院 自动化系, 山西 太原, 030008; 4. 中北大学 军民融合协同创新研究院, 山西 太原, 030051)
针对当前无人水面侦察艇在面临复杂水域环境下出现的反应迟钝、稳定性欠佳以及参数调节繁杂等问题, 提出一种基于改进型自抗干扰控制(ADRC)算法的无人水面侦察艇轨迹跟踪方法。通过研究其控制系统, 构建改进型ADRC控制器构架, 并在ADRC算法中引入遗传变异结合粒子群优化的策略, 对ADRC控制器各参数进行初值初始化及全局参数寻优。仿真和实验结果对比可知, 文中方法与传统算法相比具有响应速度快、超调量小、误差低、轨迹跟踪精确度高等优势, 运用该算法的无人水面侦察艇在复杂水域环境下的轨迹跟踪效果良好, 行驶平稳。
无人水面侦察艇; 自抗干扰控制算法; 轨迹跟踪; 遗传算法; 粒子群优化
0 引言
近年来, 随着世界各国对海洋权益的日益重视, 无人水面侦察艇等保护海洋权益的运载平台应运而生[1-2]。无人水面侦察艇以小轻量、机动灵活、隐蔽性强、费效比高、功能多、用途广、零伤亡等优点, 广受各国海军的青睐, 各军事强国在此领域已展开深入研究, 拥有众多产品, 并形成比较成熟的无人水面侦察艇体系。国内相关研究起步较晚, 仍处于单个系统的开发阶段[3], 大多为远程简易控制, 尚未进入大规模应用阶段。轨迹跟踪作为无人水面侦察艇的关键技术, 其目的是为了提高航行路径跟踪的准确性和精确性。目前, 比例-积分-微分(proportion integration differentiation, PID)算法已被广泛应用于无人水面侦察艇轨迹跟踪研究[4], 该方法虽然结构简单、易于操作、成本低, 但是跟踪效果差、精确度低; 自抗扰控制(active disturbance rejection control, ADRC)算法[5]与PID算法相比, 虽然设计简单、计算量小、控制精度有所提高, 但是遇到航迹曲率大时, 鲁棒性欠佳, 易出现船体抖动现象; 也有学者提出轨迹跟踪快速终端滑模控制方法[6], 该方法虽然无需精确数学模型, 控制精度高, 但算法复杂, 易出现局部最优, 硬件要求高, 实现较为困难[7-8]。
鉴于以上轨迹跟踪算法的局限性, 文中提出一种基于ADRC算法与机器视觉相结合的轨迹跟踪方法, 针对无人水面侦察艇在水面未知干扰情况下进行跟踪控制器和扩张观测器补偿, 采用粒子群算法扩大参数范围, 减小误差, 达到精确的期望运行轨迹, 以解决目前无人水面侦察艇在水面干扰较多情况下跟踪误差大、精度低等问题, 为其水面航迹任务规划多领域应用提供参考。
1 轨迹跟踪伺服控制系统
无人水面侦察艇具有自主水面航行、自主避障及自主周围环境感知等特性, 可同时服务于军、民领域, 在近海侦察巡防、紧急搜救及钻井平台保护等方面发挥着重要作用, 其依靠静音效果优良的直流伺服电机的伺服控制系统来达到水面轨迹任务规划行驶。无人水面侦察艇轨迹跟踪控制系统由数字信号处理(digital signal proce- ssing, DSP)伺服控制器、驱动器、伺服电机、减速机构、环境感知模块以及速度和姿态反馈模块组成[9]。控制机理通过DSP伺服控制器对驱动器进行控制; 驱动器驱动伺服电机及减速模块来实现对艇的水面推进行驶控制; 速度和姿态反馈模块将艇的速度和艇体的姿态反馈到DSP伺服控制器, 控制器由速度和姿态偏差进行算法运算校正, 实现对艇水面航行轨迹[10]的精确跟踪控制, 原理如图1所示。
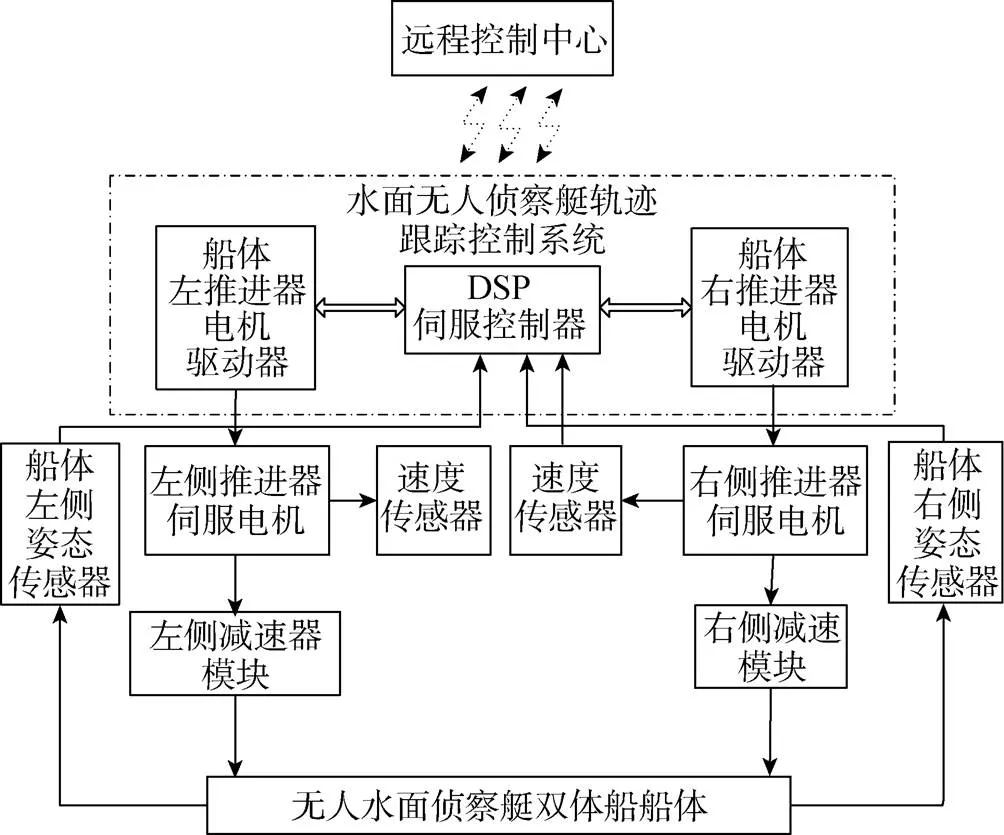
图1 轨迹跟踪伺服控制原理图
2 轨迹跟踪伺服控制系统数学建模
2.1 运动模型构架及坐标转换
采用数学模型组(mathematical model group, MMG)的分离类型建模[11]。无人水面侦察艇航行时会受到重力、惯性和黏性水动力、水面水风以及水浪等多种因素影响, 其运动模型结构如图2所示。
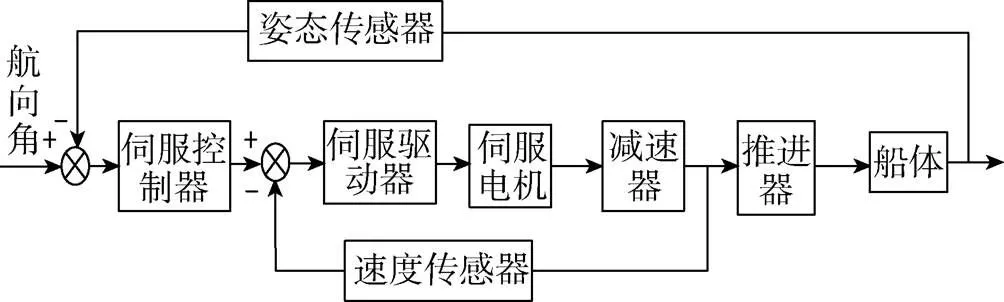
图2 轨迹跟踪运动模型图
在运动方程建模前, 首先要进行坐标关系研究。由于无人水面侦察艇在复杂未知水面上运动, 需对其非线性、不确定性进行模型设定: 设定艇体为质量均匀分布的常值刚体; 设定水面为平面, 大地坐标为惯性坐标系; 设定水体密度恒定且不可压缩。坐标关系图如图3所示。

图3 坐标关系图

2.2 数学模型创建

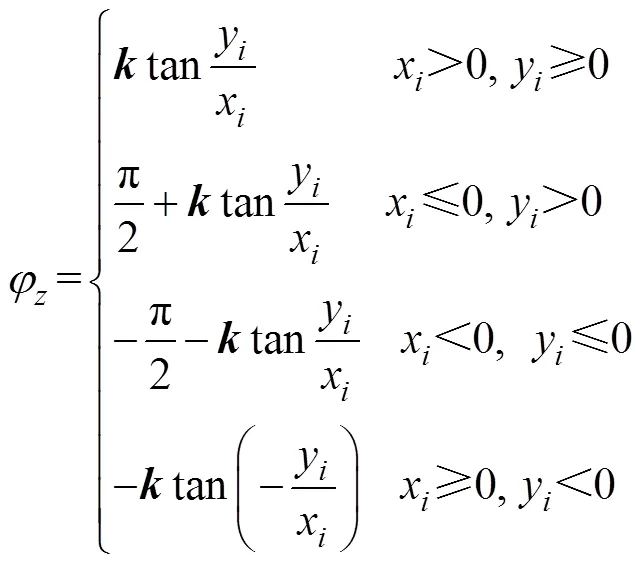



航向偏差

联合视向角及其补偿运算, 可得航向误差角

在创建上面推导过程的基础上, 结合图2得到数学模型框图, 如图4所示。
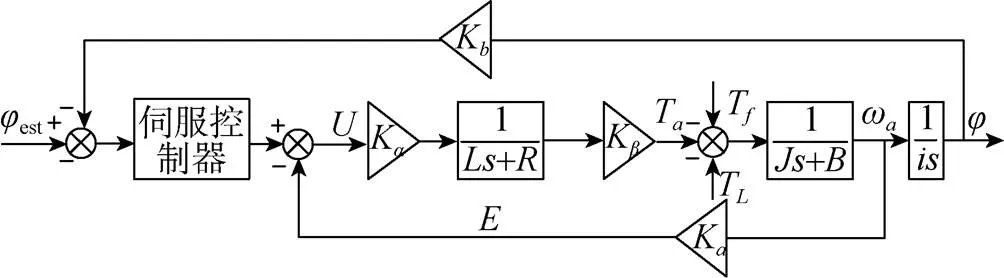
图4 数学模型图
3 改进型ADRC算法设计
3.1 ADRC算法设计
ADRC是通过估计补偿不确定影响的一种新型控制算法, 该算法无需确定未知外部干扰模型或直接测量未知外部干扰量即可解决外部干扰,并通过数字化PID控制误差来消除误差, 提高系统的控制品质和控制精度, 尤其在复杂恶劣环境下, 具有精度高、误差小、抗干扰能力强等优越性。基于ADRC算法的无人侦察艇轨迹跟踪控制构架由微分控制器、非线性反馈和扩张状态观测等[12-13]构成, 其结构框图如图5所示。
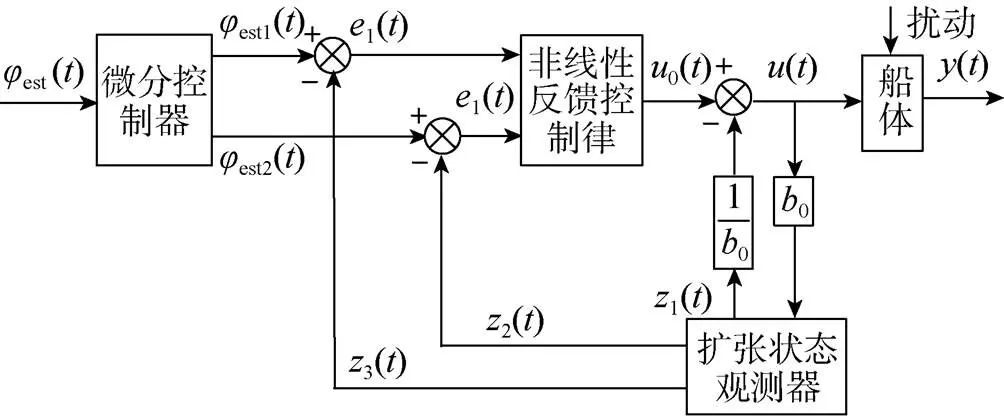
图5 轨迹跟踪ADRC结构图
由图5可知, 轨迹跟踪ADRC控制算法采用微分控制器进行过渡过程的处理, 以获得理想的光滑输入信号, 并从中提取微分信号。
对微分信号进行离散处理得



由图5对扩张观测器进行设计处理, 其作为ADRC的核心对状态和内外扰动进行实时的估计并补偿, 对未知的扰动及不确定的因素进行“积分串联”处理, 得到近似线性化。
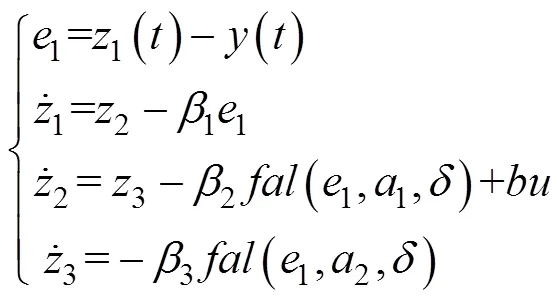
其中


由被控对象可得
上式将被控对象进行实时动态的线性化处理[11], 由系统状态误差重建系统状态和扰动, 并给予实时补偿, 具有抗总干扰的作用。
对非线性反馈观测器进行设计, 鉴于线性反馈观测器需要被控对象的精确模型, 文中提出非线性反馈感测器的线性化处理, 利用增益反比来抑制扰动。
对于误差系统


由以上公式联立推导得

3.2 改进型ADRC算法设计
对ADRC控制器的结构进行上述设计后, 需要进行在线参数寻优自主调节, 并且无需精确的数学模型, ADRC控制器的参数初始化及优化值对控制器的最佳参数获取具有关键作用。

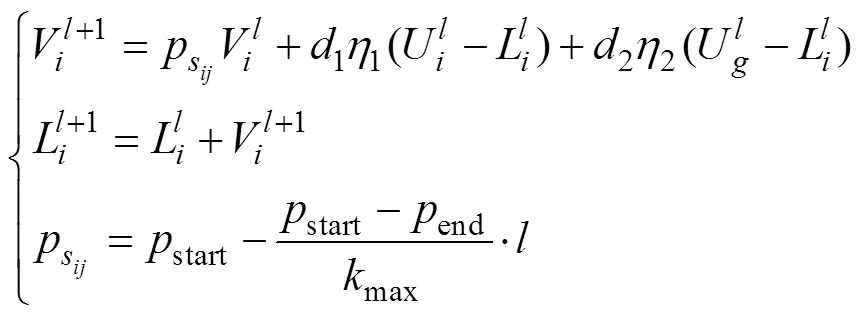
3.3 改进型ADRC控制器结构设计
为进一步提升无人水面侦察艇的效能, 采用改进型ADRC算法对 ADRC 结构中非线性控制规律和扩张状态观测器中所涉及参数进行自主在线调节, 改进型ADRC控制器结构见图6。

图6 轨迹跟踪改进型ADRC控制器结构图

4 仿真及分析
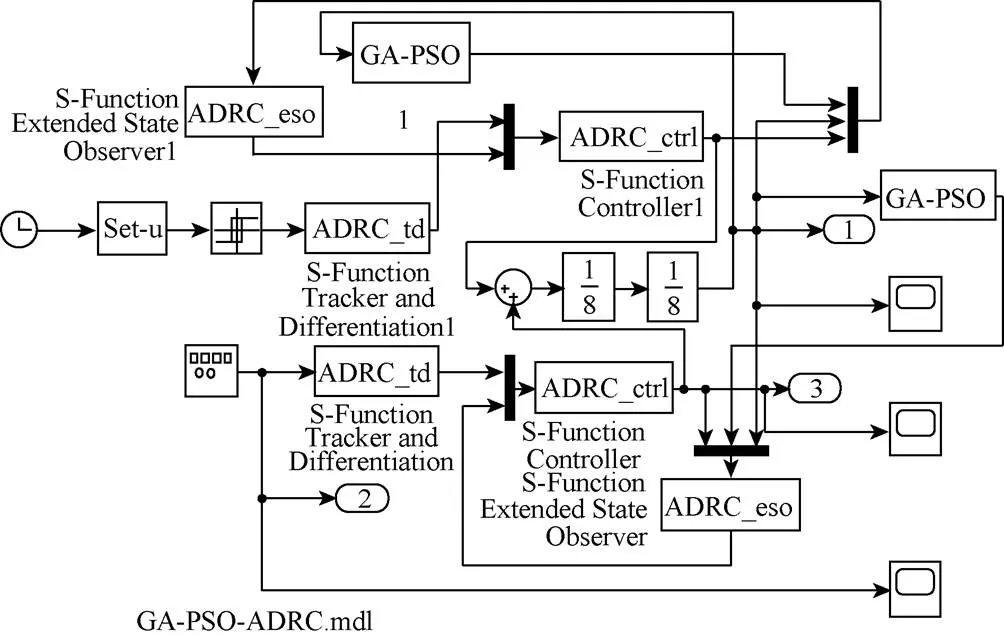
图7 改进型ADRC控制器跟踪轨迹Simulink仿真模型


图8 不同航向角下轨迹跟踪曲线

图9 水面航向轨迹跟踪图
由图8可知, 在给定目标航向角从0~1的阶跃信号下, PID算法稳定, 但运算耗时长且超调量大; 传统ADRC算法虽可快速趋于稳定, 但有超调; 改进型ADRC算法可短时间进入稳定状态, 几乎没有超调, 响应速度快, 误差小。
由图9中3种算法的航向轨迹对比可知, 文中的改进型算法无需人工干预, 在预设航行点到点中, 航行轨迹平稳、躲避障碍区域效果好、响应快速、运行稳定、抗干扰能力强, 尤其在水面未知环境下, 能够很好地完成航行路线。
5 结束语
文中针对无人水面侦察艇在未知水面环境下, 传统算法及控制器存在的抗干扰能力差、响应速度慢、控制困难等不足, 提出了一种改进型ADRC算法, 利用GA-PSO思想对ADRC的各参数进行初始化及优化设计, 并完成全局寻优, 解决了传统算法仅能局部寻优的不足; 同时较传统强、轨迹跟踪精度高、避障能力强等优势, 仿真验证了文中算法的可行性和实用性, 为解决中小型水面无人多种艇类的更精确控制提供一种新的思路和方法。
[1] 吴青, 王乐, 刘佳仑. 自主水面货船研究现状与展望[J]. 智能系统学报, 2019, 14(1): 57-71.
Wu Qing, Wang Le, Liu Jia-lun. Research Status and Prospect of Autonomous Surface Cargo Ships[J]. Journal of Intelligent Systems, 2019, 14(1): 57-71.
[2] 王俊龙, 袁伟. 船舶推进系统可靠性分析研究[J]. 兵器装备工程学报, 2020, 41(7): 208-212.
Wang Jun-long, Yuan Wei. Research on Reliability Analysis of Marine Propulsion System[J]. Journal of Ordnance Equipment Engineering, 2020, 41(7): 208-212.
[3] 向前, 何希盈. 无人海上航行器磁探潜方法研究[J]. 兵器装备工程学报, 2019, 40(12): 16-19.
Xiang Qian, He Xi-ying. Research on Submarine Searching Method of Unmanned Marine Vehicle with Magnetic Anomaly Detector[J]. Journal of Ordnance Equipment Engineering, 2019, 40(12): 16-19.
[4] 张磊, 庄佳园, 王博, 等. 水面无人艇技术[M]. 上海: 上海交通大学出版社, 2018.
[5] 文元桥, 肖长诗, 朱曼, 等. 水面无人艇的体系结构与运动控制[M]. 武汉: 武汉理工大学出版社, 2019.
[6] 侯瑞超, 唐智诚, 王博, 等. 水面无人艇智能化技术的发展现状和趋势[J]. 中国造船, 2020, 61(S1): 212-219.
Hou Rui-chao, Tang Zhi-cheng, Wang Bo, et al. Development Status and Trend of Intelligent Technology for Unmanned Surface Vehicles[J]. Shipbulding of China, 2020, 61(S1): 212-219.
[7] Ma L Y, Xie W, Huang H B. Convolutional Neural Network Based Obstacle Detection for Unmanned Surface Vehicle[J]. Mathematical Biosciences and Engineering, 2019, 17(1): 845-861.
[8] 曾凡明, 曹诗杰. 水面无人艇自主控制系统设计与实验研究[J]. 中国造船, 2016, 57(2): 164-174.
Zeng Fan-ming, Cao Shi-jie. Design and Experimental Study of Autonomous Control System for Unmanned Surface Vehicle[J]. Shipbuilding of China, 2016, 57(2): 164-174.
[9] 闫振争, 庄继晖, 程晓鸣, 等. 自抗扰算法在无人车路径跟踪控制中的应用[J]. 重庆理工大学学报(自然科学), 2020, 35(3): 61-70.
Yan Zhen-zheng, Zhuang Ji-hui, Cheng Xiao-ming, et al. Application of Active Disturbance Rejection Algorithm in Unmanned Vehicle Path Tracking Control[J]. Journal of Chongqing University of Technology, 2020, 35(3): 61-70.
[10] Caccia M, Bivuli M, Bono R, et al. Basic Navigation Gui- dance and Control of an Unmanned Surface Vehicle[J]. Autonomous Robots, 2008, 25(6): 349-365.
[11] Rosario R V D C, Cunha J P V S, Rosa P B G. Stabilizing Control of an Unmanned Surface Vehicle Pushing a Floa- ting Load[J]. International Journal of Control, Automation and Systems, 2020, 18(SI): 1-10.
[12] Razcarz S, Vaegas-jarillo C, Jafari R, et al. Flow Control of Fluid in Pipelines Using PID Controller[J]. IEEE Access, 2019, 36(7): 25673-25680.
[13] 韩佩妤, 韩玮, 梁旭.一种水面无人艇航行及任务载荷复合控制方法[J]. 无人系统技术, 2018, 1(3): 46-51.
Han Pei-yu, Han Wei, Liang Xu. A Compound Controlling Method of Sailing and Task Execution for Unmanned Surface Boat[J]. Unmanned System Technology, 2018, 1(3): 46-51.
Trajectory Tracking of Unmanned Surface Reconnaissance Vessel Based on Improved ADRC Algorithm
WANG Xiao-hui1, HUANG Gang1, DING Jie2, YUE Guang3,4, PAN Yu-tian4
(1. Department of Electronic Engineering, Taiyuan Institute of Technology, Taiyuan 030008, China; 2. College of Electrical Power Engineering, Taiyuan University of Technology, Taiyuan 030024, China; 3. Department of Automation, Taiyuan Institute of Technology, Taiyuan 030008, China; 4. Collaborative Research Institute of Civil Military Integration, North University of China, Taiyuan 030051, China)
To solve the problems of slow response, poor stability, and complex parameter adjustment of current unmanned surface reconnaissance vessels in complex water environments, a trajectory-tracking method for unmanned surface reconnaissance vessels based on the improved active disturbance rejection control(ADRC) algorithm. By studying the control system of an unmanned surface reconnaissance vessel, an improved ADRC controller architecture is constructed. Then, genetic mutation and particle swarm optimization are introduced into the algorithm to initialize the parameters of ADRC and optimize global parameters. Compared with the traditional algorithm, the proposed method has the advantages of fast response speed, small overshoot, low error, and high trajectory-tracking accuracy. It is verified that the improved ADRC algorithm has a good trajectory-tracking effect and runs smoothly in a complex water environment.
unmanned surface reconnaissance vessel; active disturbance rejection control(ADRC) algorithm; trajectory tracking; genetic algorithm; particle swarm optimization
TJ630; U664.82
A
2096-3920(2021)03-0286-07
10.11993/j.issn.2096-3920.2021.03.006
王晓慧, 黄刚, 丁洁, 等. 基于改进型ADRC算法的无人水面侦察艇轨迹跟踪[J]. 水下无人系统学报, 2021, 29(3): 286-292.
2020-11-19;
2020-12-18.
国家自然基金(51275489); 山西高等学校科技创新项目(2020L0673).
王晓慧(1986-), 女, 硕士, 讲师, 主要研究方向为测试与检测技术、无线传感器网络、智能算法、无人智能化等.
(责任编辑: 杨力军)
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
北京航空航天大学学报(2021年9期)2021-11-02
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
课外生活(小学1-3年级)(2020年2期)2020-03-09
轻兵器(2017年2期)2017-03-10
轻兵器(2016年20期)2016-10-28
科普童话·百科探秘(2015年6期)2015-10-13
滇池(2014年5期)2014-05-29
坦克装甲车辆·新军事(2009年9期)2009-09-17