基于RobotStudio的自动生产线工作站仿真设计*
2021-07-12 11:04卢庆
科技创新与应用 2021年18期
卢 庆
(贵州航天职业技术学院,贵州 遵义 563000)
随着近年来智能制造业的发展,工业机器人的应用日益频繁,尤其是在自动化生产线中的使用最为普遍。但相对而言,会操作工业机器人的技术技能型人才就显得尤为稀少了。作为在学院从事工业机器人教学的工作者,我们虽不能将整个现代自动生产线搬入课堂,但可以将其简化的模型工作站及其虚拟仿真技术融入项目教学。本文将以某企业玻璃生产线为例,应用ABB公司的RobotStudio软件,介绍如何使用Smart组件对构建的模拟工作站进行仿真设计。
1 工作站概述
自动生产线工作站是玻璃生产线的简化模型,集物料的搬运、传送、机器人走轨迹等功能于一体,将多个机器人协同作业的内容,集中在一个机器人上独立完成。自动生产线工作站如图1所示,主要由工业机器人、组合工具、传送带、物料台等组成,其功能是将前一道工序的玻璃通过传送带输送至当前工序完成玻璃的涂胶、打磨或切割。其中,组合工具如图2所示,由4个真空吸盘和1个气缸等组成,可完成取放玻璃和走轨迹(模仿涂胶、打磨或切割)的功能;传送带如图3所示,由输送皮带、PLC、变频器和三相异步电动机等组成,主要完成玻璃的远距离运送功能;物料台有2个,一个用于放置完成前一道工序的玻璃,另一个用于存放当前工序的玻璃。
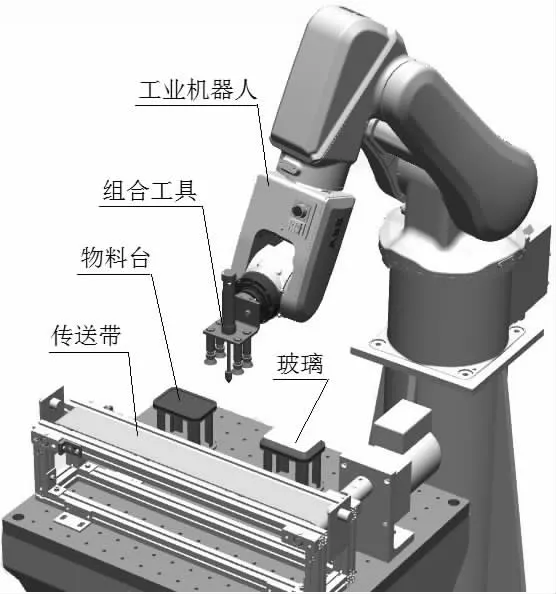
图1 自动生产线工作站
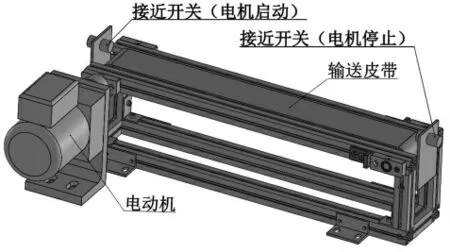
图3 传送带
该工作站工作前,先将组合工具安装在工业机器人的第六轴法兰盘上,玻璃放置在前一道工序的物料台上。工作站工作时,机器人运行至玻璃上方,将玻璃吸取放置在传送带上,传送带前端接近开关检测到玻璃后,PLC程序控制传送带电机启动,输送玻璃至传送带末端,接近开关检测到工件以后,传送带电机停止,同时机器人吸取玻璃放置在当前工序的物料台上,最后伸出气缸完成当前工序。
由于在RobotStudio软件中创建机器人工具比较简单,这里不再赘述,下面主要介绍应用Smart组件进行的仿真设计。
2 Smart组件[1]设计
2.1 创建真空吸盘Smart组件
真空吸盘Smart组件设计如图4所示,其中,“传感器”子组件(LineSensor)安装在图2组合工具吸盘(4个真空吸盘任意一个)上,通过LineSensor检测到物体,然后用“动作”子组件(Attacher和Detacher)将物体吸附或释放物体。
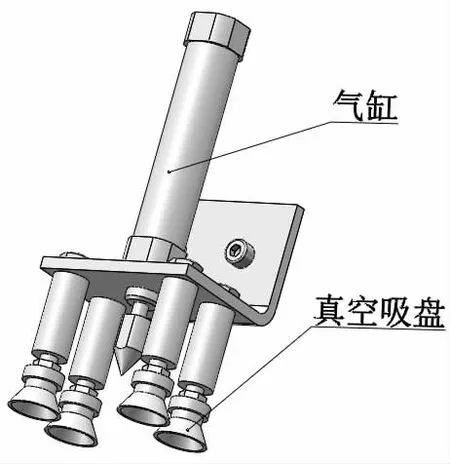
图2 组合工具
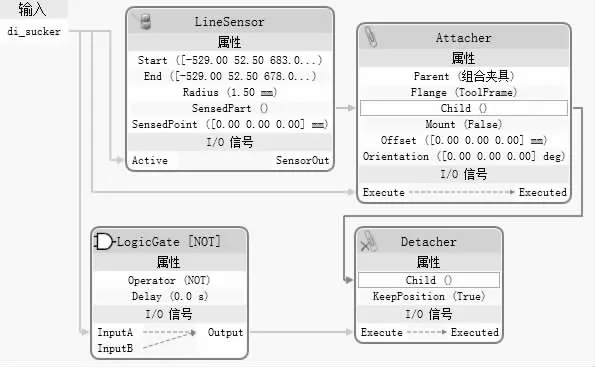
图4 真空吸盘Smart组件设计
2.2 创建接近开关(电机启动)Smart组件
接近开关(电机启动)Smart组件设计如图5所示,其中,“传感器”子组件(LineSensor)安装在图3接近开关(电机启动)上,通过LineSensor检测到物体,然后用“本体”子组件(LinearMover)将物体送出一段距离。应注意,在设置LineSensor“属性”时,要将LineSensor长度大于LinearMover的Distance(行走距离)。
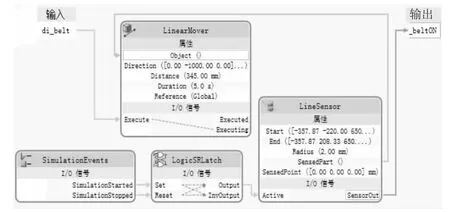
图5 接近开关(电机启动)Smart组件设计
2.3 创建接近开关(电机停止)Smart组件
接近开关(电机停止)Smart组件设计如图6所示。
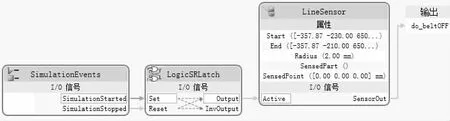
图6 接近开关(电机停止)Smart组件设计
2.4 创建气缸Smart组件
通过“本体”子组件(PoseMover)控制气缸的伸出和缩回动作,气缸Smart组件设计如图7所示。
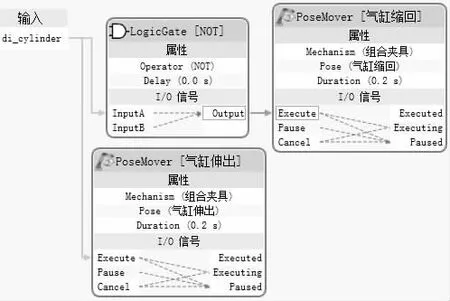
图7 气缸Smart组件设计
2.5 I/0信号与工作站逻辑
工作站逻辑设定即是将Smart组件的输入/输出信号与机器人端的输入/输出型号作关联,机器人创建的I/0信号如图8所示,5个I/O信号说明见表1,设定的工作站逻辑如图9所示。
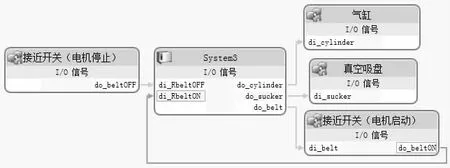
图9 工作站逻辑设计
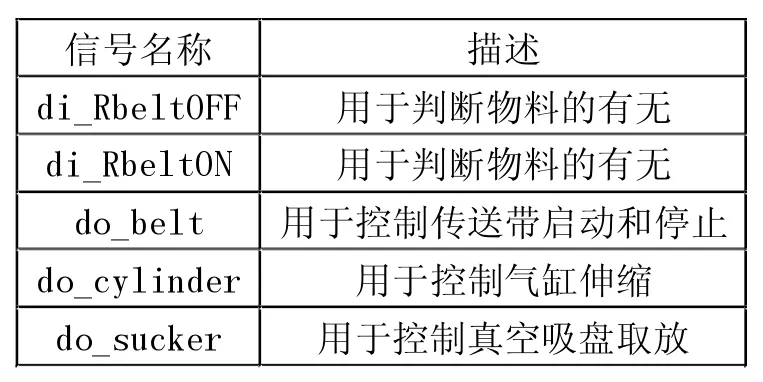
表1 I/0信号说明
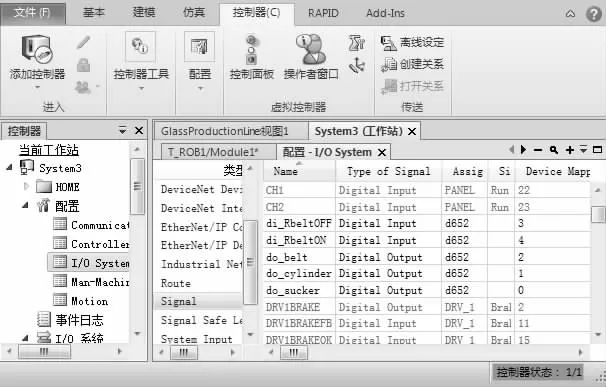
图8 创建I/0信号
3 系统编程
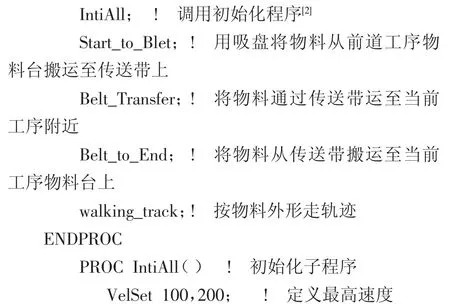
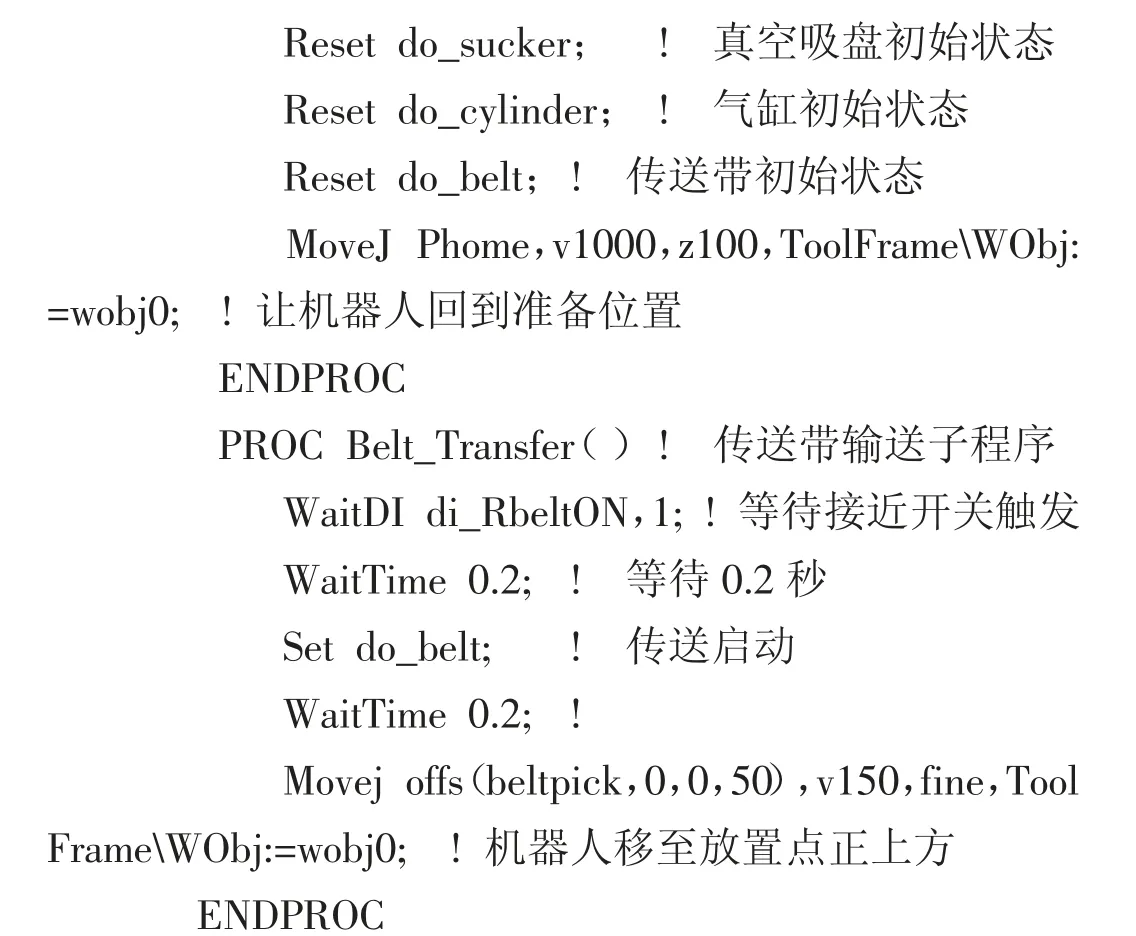
设计的部分程序如下:
PROC main() !主程序
4 结论
本文结合企业实际和教学,应用RobotStudio软件搭建了自动生产线工作站,通过Smart组件功能实现了工作站的仿真,动画效果直观、逼真,不仅方便教学演示,更有利于程序的调试,对生产和教学都具有应用价值。
猜你喜欢
今日农业(2022年16期)2022-11-09
中学生数理化·高一版(2021年1期)2021-03-19
——“模型类”相关试题选登
教学考试(高考物理)(2020年4期)2020-11-16
电脑报(2020年32期)2020-09-06
汽车维护与修理(2019年1期)2019-07-09
模具制造(2019年4期)2019-06-24
中学教学参考·理科版(2016年11期)2017-06-08
科技创新导报(2016年9期)2016-05-14
汽车与新动力(2014年4期)2014-02-27
中国火炬(2009年12期)2009-10-17