一种自主登台对抗机器人研究
2021-07-12 11:04王学雷吕世霞韩健睿
科技创新与应用 2021年18期
王学雷,黄 杰,吕世霞,时 光,韩健睿
(1.北京电子科技职业学院,北京 100176;2.北京信息职业技术学院,北京 100070;3.北京工业大学,北京 100124)
随着科学技术的发展,机器人在工业、农业、服务业、娱乐业、特种作业等领域有了广泛应用。近年来,学者们对不同形式的对抗机器人进行了深入研究[1-6],并取得一定成果。本文对一种自主登台对抗机器人进行了分析研究,该机器人携带多种传感器,可实现自主登台、自主寻找攻击目标,并对攻击目标进行攻击。
1 自主登台对抗机器人结构
自主登台对抗机器人主要由机械铲、底盘、边缘检测红外光电传感器、寻人红外光电传感器、登台条件传感器与倾角传感器等构成。
其中,机械铲(图1)用来对抗和攻击其他机器人。底盘(图2)布置有电机、车轮、电机驱动器、登台条件传感器等,登台条件传感器用来检测前方是否有擂台,当机器人检测到前方的对抗擂台时,机器人将会自主登上对抗擂台。车身(图3)布置寻人红外光电传感器和控制器、电源,寻人红外光电传感器用来检测对抗擂台上是否有攻击目标。当检测到擂台上有攻击目标时,机器人将会对其进行攻击和对抗。倾角传感器(图4)用来检测机器人在登上对抗擂台时的角度,以及检测本机器人是否被其他机器人攻下擂台。

图1 机械铲

图2 底盘
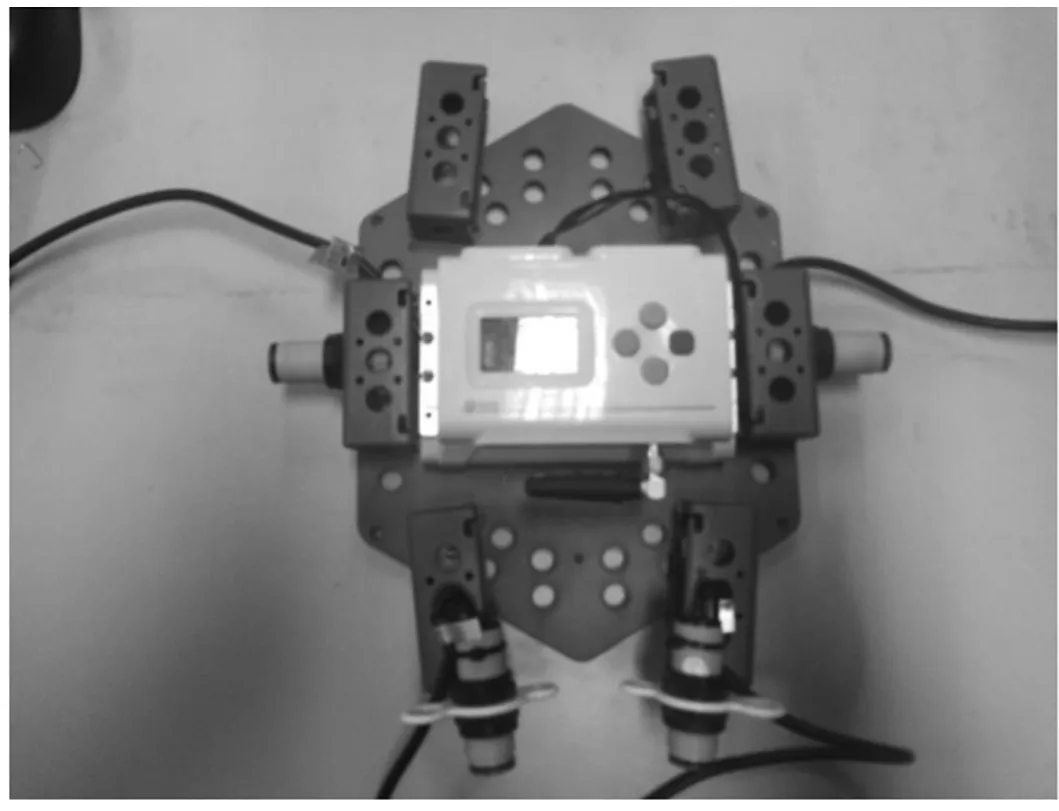
图3 车身

图4 倾角传感器
2 自主登台对抗机器人工作原理
自主登台对抗机器人通过自身机械臂相互协调可实现登上擂台,之后在场上巡航,寻找对手并实现冲撞,在撞击对手的同时,对擂台边缘进行检测,在保证自我平稳运行,并在自身安全的情况下对攻击目标进行攻击。该机器人可通过自身携带的传感器来判断自身是否已被攻击到台下,当判断到自身被攻击到台下时,该机器人会重新自主寻找擂台边缘,并且再次登上擂台,并进行巡航,寻找攻击目标及冲撞。
3 自主登台对抗机器人程序设计
要实现机器人的自主登台与攻击等功能,需对其进行程序设计。该机器人的程序包括登台程序、边缘检测程序、巡航程序、攻击程序、掉台程序及台下程序。各程序介绍如下。
3.1 登台程序
登台程序主要用来控制机器人实现登台对抗,通过登台程序,使机器人利用其前臂和后臂的相互支撑配合而达到登上擂台的目的。
3.2 边缘检测程序
机器人在运行过程中需要时时检测自身是否在擂台边缘,以防自身从擂台掉落。边缘检测程序利用布置在机器人上的四个特定红外光电传感器来检测其是否在擂台边缘。当机器人到达擂台边缘时,机器人做出相应调整并远离擂台边缘。用于边缘检测的四个红外光电传感器分别布置在机器人的左前、右前、左后及右后方,用来检测对抗擂台边缘,防止机器人掉落擂台。
3.3 巡航程序
机器人在擂台上进行对抗时,需要时时巡航自身位置信息,巡航程序利用分布在车身底部四个角的灰度传感器来确定其在擂台上的位置,并做出巡航动作(擂台为从中心到边缘由白色渐变为黑色的方形擂台)。四个传感器分别为左前灰度传感器、右前灰度传感器、左后灰度传感器及右后灰度传感器,用来检测机器人在擂台上的位置信息。
3.4 攻击程序
自主登台对抗机器人最主要的功能是实现对目标的攻击,当机器人边缘检测程序未检测到擂台边缘、巡航程序未达到灰度极限值(灰度极限值为机器人在擂台上灵活活动时灰度传感器的最大及最小值)时进入攻击程序。攻击程序主要依靠机器人前侧的两个红外光电传感器及左右方的两个红外光电传感器对攻击目标位置进行判定,当机器人前端两个红外光电传感器同时寻找到攻击目标时,机器人对目标进行全速冲撞和攻击;当机器人前端两个红外光电传感器没有同时检测到攻击目标时,此时机器人利用左侧红外光电传感器向右调整机器人位置,或利用右侧红外光电传感器向左调整机器人位置,使机器人前端两个红外光电传感器同时寻找到攻击目标。当机器人找到攻击目标时,对攻击目标进行冲撞和攻击。
3.5 掉台程序
当机器人被其他机器人攻下擂台时,机器人倾角传感器可确定其是否掉台,因为机器人从擂台上掉落时会有大幅度倾斜,此时倾角传感器数值会达到较大值,机器人通过此判定确认自身已从擂台掉落,并自动进入台下程序。
3.6 台下程序
当掉台程序判定机器人已在台下时,台下程序开始运行。因红外光电无法检测到黑色,而可检测到白色,因此设置擂台侧面颜色为白色。当机器人在台下的时候,台下程序启动。若机器人红外光电传感器检测到白色擂台侧面,则进入上台程序;若机器人红外光电传感器未检测到擂台侧边,则机器人自身进行一定角度的旋转,然后再次对擂台侧面进行检测,直到红外光电传感器检测到擂台侧边时,机器人重新进入上台程序,实现机器人的登台对抗。
自主登台对抗机器人程序流程如图5所示。
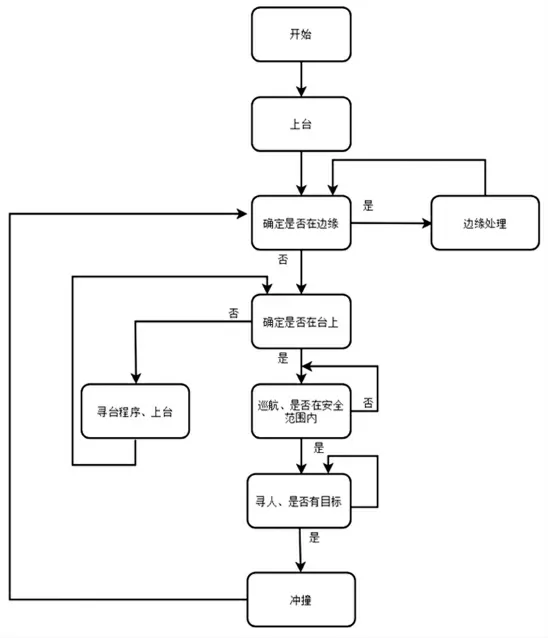
图5 自主登台对抗机器人程序流程图
4 自主登台对抗机器人变量设置
自主登台对抗机器人携带有多种不同功能的传感器,在程序设计时,需对传感器变量名和控制端口进行设置,该机器人各传感器变量名称和控制器端口配置如表1所示。
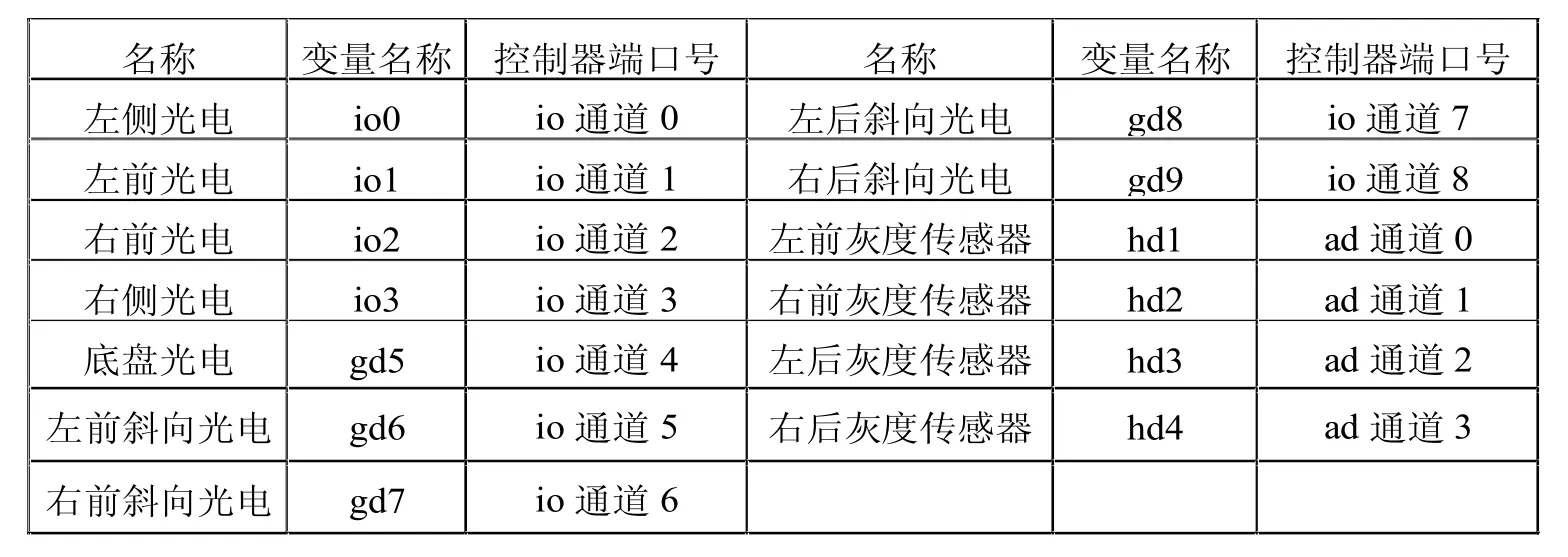
表1 变量名称和控制器端口
接通电源后,机器人进入程序,完成登台动作、巡航动作、寻找攻击目标动作、攻击动作及寻台动作,在擂台上放置攻击目标后可将攻击目标推至台下,该机器人试验成功。经过试验,该机器人可完成预期目标,具有结构合理,程序稳定,可执行性强等特点。
5 结论
随着科学技术的发展,机器人的应用领域越来越广泛。本文对一种自主登台对抗机器人进行了研究,该机器人由机械铲、底盘、边缘检测红外光电传感器、寻人红外光电传感器、登台条件传感器、倾角传感器等构成。通过对机器人控制程序的设计,实现了机器人的自主登台、边缘检测、自主攻击等功能。该机器人具有结构合理,程序稳定,可执行性强等特点。
猜你喜欢
红外技术(2022年11期)2022-11-25
北京航空航天大学学报(2022年6期)2022-07-02
中国典型病例大全(2022年7期)2022-04-22
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
纺织科学研究(2021年1期)2021-03-19
天津医科大学学报(2021年1期)2021-01-26
科学大众·小诺贝尔(2021年10期)2021-01-22
中国信息技术教育(2020年2期)2020-02-02
青年时代(2017年4期)2017-03-10