浮标水下上浮过程建模与仿真
2021-07-14 23:37李炜辰章佳荣
数字海洋与水下攻防 2021年3期
李 亮,李炜辰,章佳荣,王 冠
(中国船舶工业系统工程研究院,北京 100094)
0 引言
潜艇探测空中目标的常用手段主要有雷达、光电、红外以及声传感器[1-2]。雷达和光电探测手段只能在潜艇浮出水面或潜望深度时使用,极易暴露自身位置,而红外探测手段无法解决视场角小和水面海浪遮挡等问题[3-4]。声探测手段是一种在保证自身隐蔽状态下实现对空探测的有效途径,主要有2种方式:一种是利用低频对空警戒声呐对入水的直升机辐射噪声进行探测预警,但由于所处介质不同,所能获取的目标信息极其有限;另一种是利用空气声探测浮标来获取空中目标的方位角、俯仰角和距离,这种方式可获取的信息要比前一种方式丰富,并且精度更高[5-6]。为保证自身的隐蔽性,潜艇在使用空气声探测浮标时,需要在水下一定深度进行发射,浮标在上浮过程中的运动姿态会影响其接收阵在水面的展开效果,进而影响浮标对空中目标的探测能力。文章针对该问题,对浮标从开始上浮到上浮至水面的全运动过程进行了建模与仿真,详细分析了初速、重心、浮力等因素对浮标运动轨迹的影响,可为浮标的设计、加工提供理论支撑与数据支持。
1 浮标上浮过程动力学建模
1.1 坐标系与姿态角定义
按如图 1所示建立地面坐标系 o xoyozo、体坐标系 oxyz、平移坐标系 ox′y′z′。地面坐标系oxoyozo原点o置于发射时刻浮标浮心在水面上的投影点, o xoyozo坐标平面与静止水面重合,yo轴垂直向上;体坐标系oxyz原点位于浮标浮心所在横截面几何中心,x轴指向浮标头部,y轴在模型纵平面内,z轴与x轴、y轴组成右手坐标系。
浮标在空间的位置由其浮心在地面坐标系内的坐标给出;为直观起见,浮标在空间的姿态仍由欧拉角系统中的3个欧拉角表示。常规的正欧拉角系统定义为:体坐标系从与平移坐标系重合的位置开始依次绕oy、oz、ox轴旋转ψ、θ、φ 3个角度得到的姿态用3个欧拉角组合来表示,分别称为偏航角、俯仰角和横滚角。在文章中,由于浮标垂直上浮,初始俯仰角度为90°,若采用正欧拉角进行描述,在俯仰角超过90°时,偏航角和滚动角均会发生畸变,故采用反欧拉角来描述浮标的姿态。反欧拉角系统定义为:体坐标系从与平移坐标系重合的位置开始依次绕oz、oy、ox轴旋转rθ、rψ、rφ 3个角度得到的姿态用3个欧拉角组合来表示,对应的坐标转换矩阵如式(1)。
欧拉方程为
式中,xω、yω、zω为浮标角速度分量。
1.2 动力学方程组
根据动量定理和动量矩定理,得到浮标水下运动空间的动力学方程组一般形式为

式中:v&ox、v&oy、v&oz为浮标浮心处的线加速度分量;
xω&、yω&、zω&为浮标角加速度分量;Amλ为惯性矩 阵。Amλ可表示为
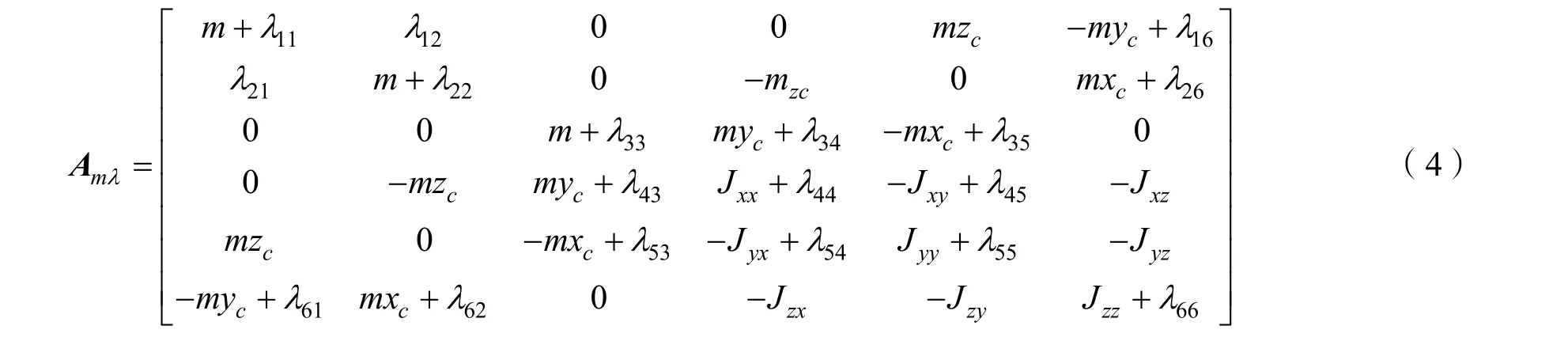
式中:m为浮标质量;xc、yc、zc为浮标质心位置;λi(ji, j=1,2,L,6)为附加质量;为浮标转动惯量、惯性矩;Avω为速度矩阵;AFM为力矩阵。Avω可表示为

式中:XB、YB、ZB为浮力在体坐标系下的3个分量;XG、YG、ZG为重力在体坐标系下的3个分量;MGx、MGy、MGz为重力矩在体坐标系下的 3 个分量; Xαμ、Yαμ、Zαμ为粘性位置力在体坐标系下的3个分量;Mαμx、Mαμy、Mαzμ为粘性位置力矩在体坐标系下的3个分量;Yωμ、Zωμ为粘性阻尼力在体坐标系下的分量;Mωμx、Mωμy、Mωμz为粘性阻尼力矩在体坐标系下的3个分量。
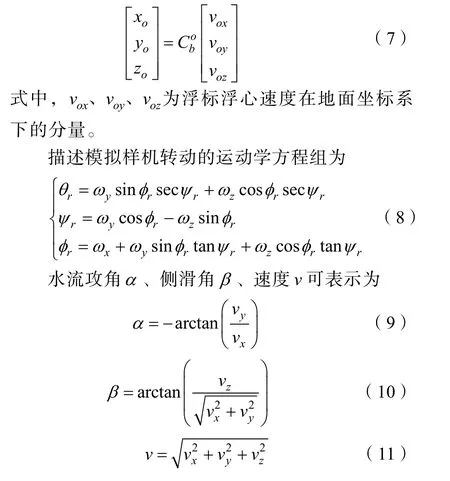
1.3 运动学方程组
描述浮标浮心平移运动的方程组可表示为
2 上浮运动仿真分析
2.1 自由上浮运动
浮标在无海流、无初速影响下进行垂直自由上浮运动的速度变化如图2所示。
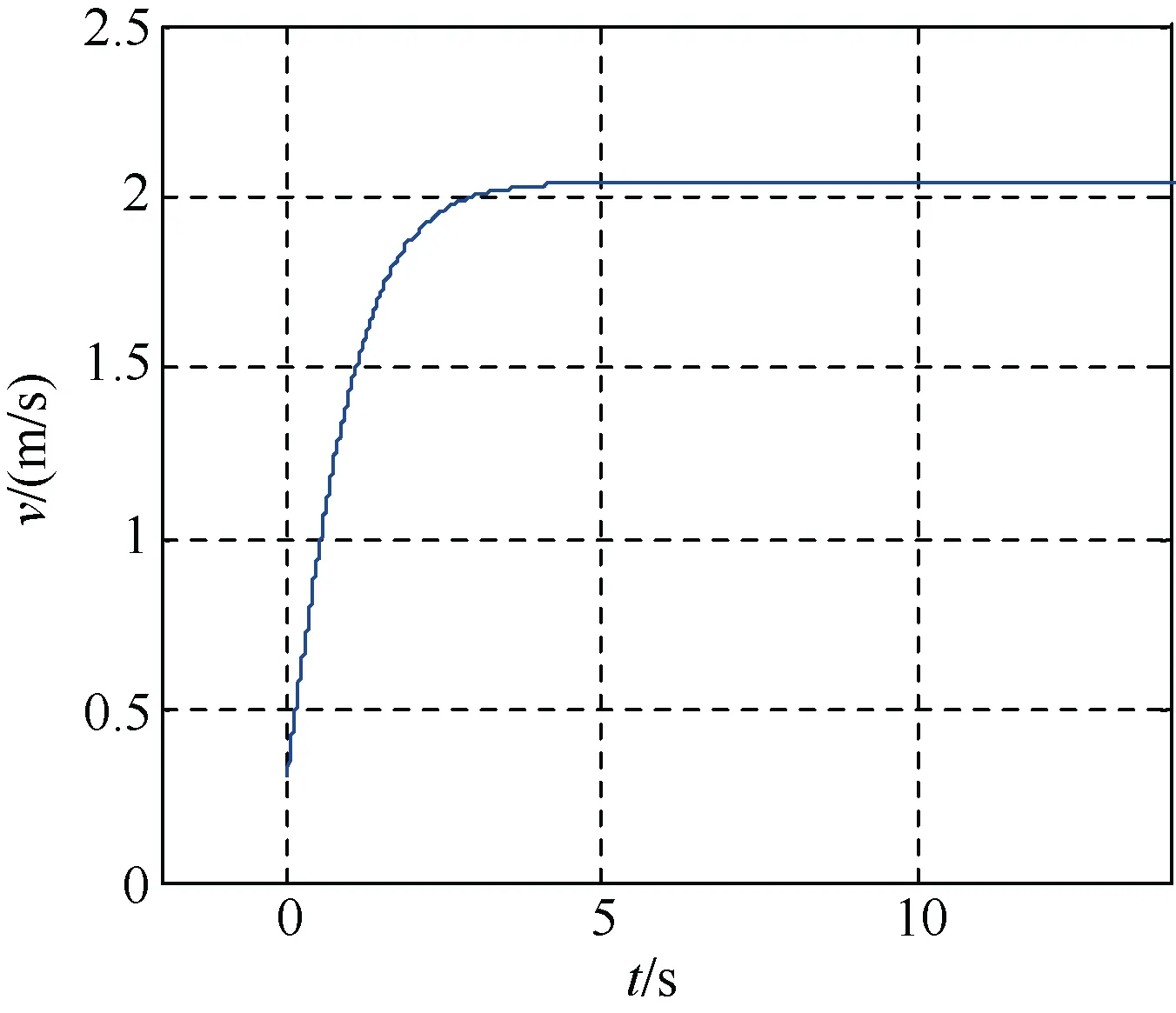
图2 垂直自由上浮过程速度变化Fig. 2 Velocity variation during vertical free floating process
初始时刻浮标在正浮力作用下开始加速运动,在t=5 s时运动稳定在 v = 2 m/s 。
2.2 基准运动轨迹
假设浮标开始上浮的初始速度为 0.3 m/s,发射平台的速度为3 kn,在此条件下的速度变化如图3所示,运动参数变化如图4所示。浮标开始上浮约7 s后各运动参数达到稳定,初始时刻较大攻角,在阻力作用下速度略有减小,正浮力作用使其具有垂直向上加速度,约7 s后速度达到最大值,运动过程中模型最大偏转角度为11.5°。
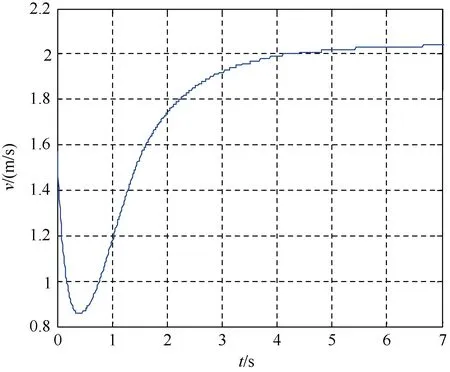
图3 基准运动轨迹下的速度变化Fig. 3 Velocity change in reference motion trajectory
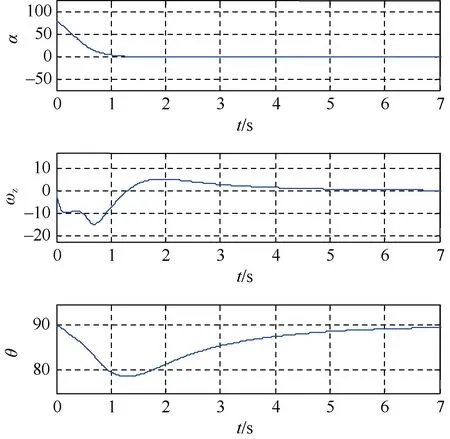
图4 基准运动轨迹下的运动参数变化Fig. 4 Changes of motion parameters in reference motiontrajectory
2.3 速度影响
在基准运动轨迹基础上调整浮标初始时刻轴向速度,对vx=0.1 m/s和vx=0.5 m/s时的仿真结果进行对比,结果如图5和图6所示。结果表明初始速度只对浮标初始运动过程有一定影响,3 s后浮标运动参数与基准运动轨迹趋于一致。

图5 不同初速下上浮过程速度变化Fig. 5 Surfacing velocity variation at different initial velocities

图6 不同初速下上浮过程运动参数变化Fig.6 Motion parameters change during surfacing at different initial velocities
2.4 正浮力影响
在基准运动轨迹基础上进行衡重参数影响研究,增大模型浮力分别为实际模型的1.5倍和2倍,计算结果如图7和图8所示。随着浮力增大,浮标开始上浮后调整运动姿态时间缩短,可更快稳定于垂直上浮状态,且浮标稳定运动速度增大。
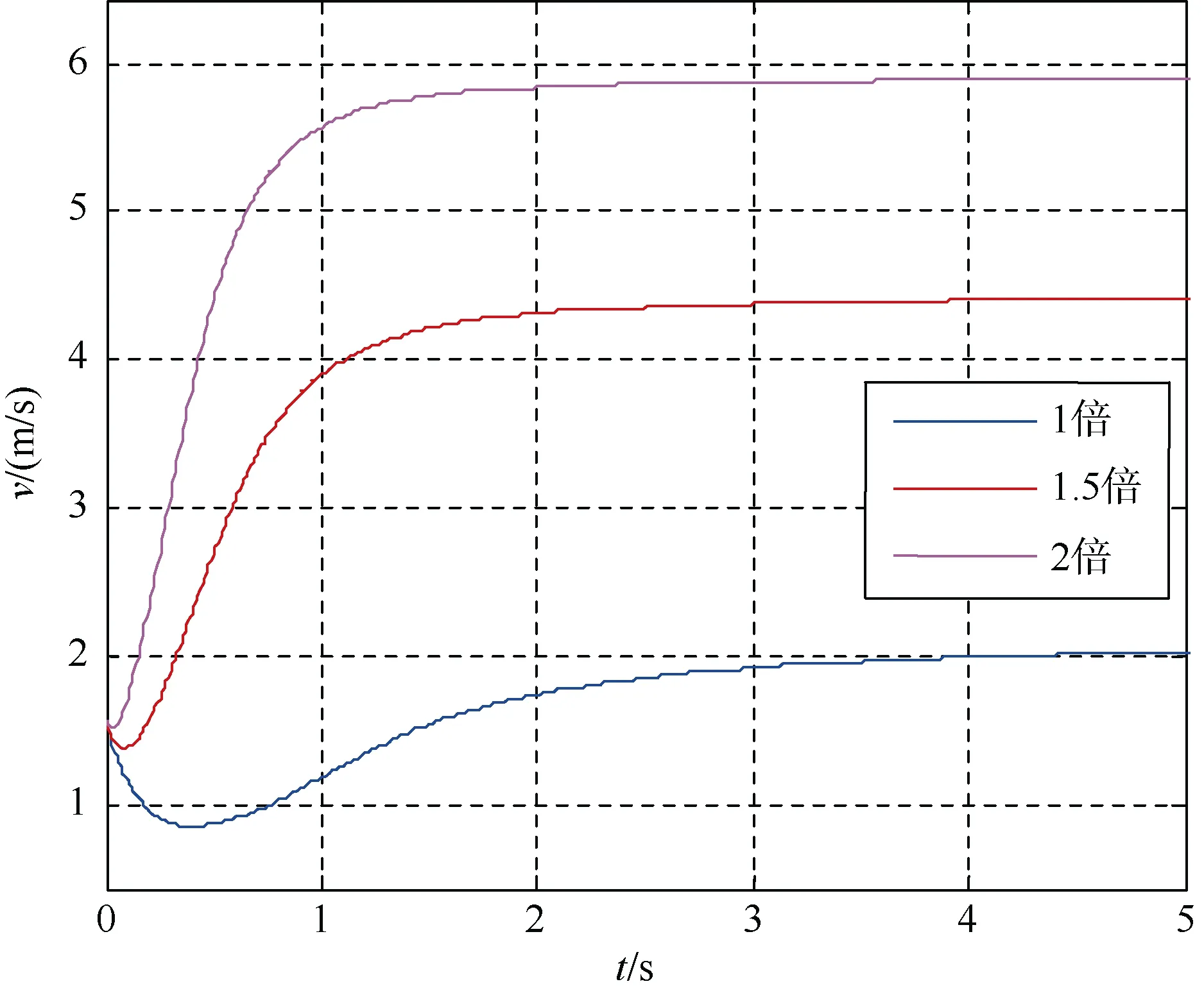
图7 不同正浮力下上浮过程速度变化Fig. 7 Surfacing velocity variation under different positive buoyancy
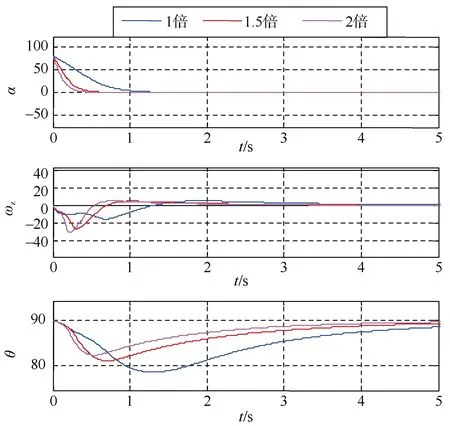
图8 不同正浮力下上浮过程运动参数变化Fig. 8 Changes of motion parameters during surfacing under different positive buoyancy
2.5 浮重心距影响
在基准运动轨迹基础上进行衡重参数影响研究,将浮重心距由 0.03 m分别增大为 0.1 m和0.2 m,仿真结果如图9和图10所示。调整浮重心距对上浮姿态没有太大影响,在初始时刻存在简短振荡过程,最终稳定于基准运动轨迹。

图9 不同浮重心距下上浮过程速度变化Fig. 9 Surfacing velocity variation under different floating center-gravity distance
2.6 海流影响
在基准运动轨迹基础上开展海流对姿态影响的研究,分别设定海流为v= -2 kn和v=2 kn,仿真结果如图11和图12所示。浮标最终保持垂直向上的姿态上浮,但由于海流影响,浮标具有等同于海流大小的法向速度,上浮过程中会随着海流产生位移,如图13所示。
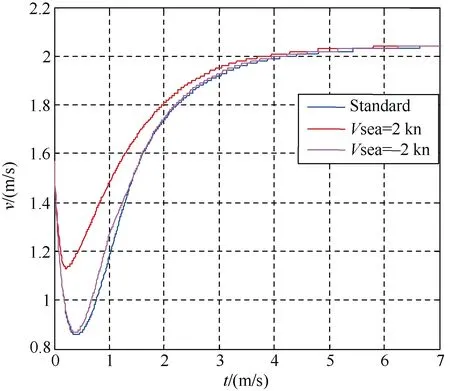
图11 不同海流下上浮过程速度变化Fig. 11 Surfacing velocity variation under different currents
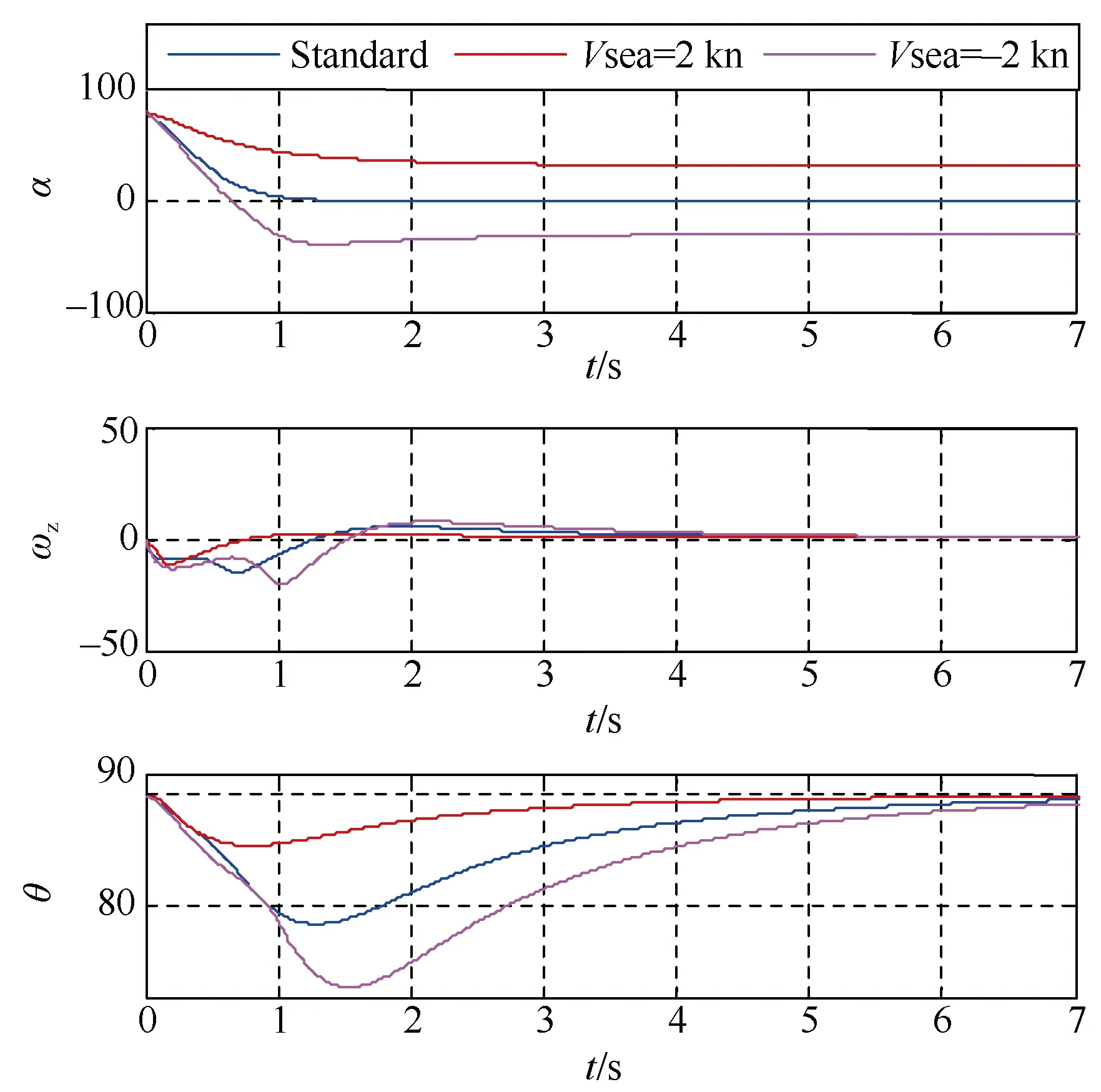
图12 不同海流下上浮过程运动参数变化Fig. 12 Changes of motion parameters under during surfacing different currents

图13 不同海流下浮标位移变化Fig. 13 Buoy Displacement variation under different currents
3 结束语
文章开展了空气声探测浮标水下上浮运动过程的建模,对初始条件、衡重参数、海流等因素对上浮过程的影响进行了仿真分析,得到结论如下:
1)在自由上浮的情况下,浮标作垂直上浮运动,在开始阶段速度逐渐增大,最终达平衡速度,并保持此平衡速度直至浮出水面;
2)初速度和平台速度只影响浮标初始阶段的运动,最终其运动参数与基准运动轨迹趋于一致;
3)增大正浮力可使浮标具有更高的出水速度,同时缩短上浮运动时间,而增大浮重心距对浮标运动姿态没有太大影响;
4)海流对浮标上浮姿态影响不大,但会在水平方向产生较大的位移。
猜你喜欢
垂钓(2022年3期)2022-05-14
导航定位学报(2022年2期)2022-04-11
垂钓(2022年1期)2022-02-09
垂钓(2021年5期)2021-05-31
语数外学习·高中版中旬(2021年11期)2021-02-14
垂钓(2019年2期)2019-09-10
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
试题与研究·中考物理(2015年4期)2016-04-07
少儿科学周刊·少年版(2015年2期)2015-07-07