基于虚拟样机的疏浚重力抓斗仿真与分析
2021-07-22 09:02刘建黄诚昭李晓燕马传艺
中国港湾建设 2021年7期
刘建,黄诚昭,李晓燕,马传艺
(中交广州航道局有限公司,广东 广州 510290)
0 引言
抓斗挖泥船是一种常用的疏浚挖泥船,一般适用于开挖码头防波堤基槽、基坑、码头泊位区、坝体、沉管隧道深基槽,以及用于陆地开河等,对于挖掘杂物、块石等更具适应性[1]。随着水工建筑物向大型化和深水化方向的发展,超深的港池航道开挖、超大型码头和超深沉管隧道的基槽开挖工程逐渐增多,抓斗挖泥船由于其自身机械式挖泥的特点,适应狭窄水域开挖基槽、基坑,同时在深挖时开挖硬质黏土和风化岩能够充分发挥其优势,必要时可以在其吊机上加装碎岩棒利用重力碎岩再开挖,在目前沿海港口疏浚、内河航道整治中是不可替代的疏浚装备;特别在日本、北美和中东等硬土质地区抓斗挖泥船应用较多,而对抓斗的深入研究尤以日本为最,设计制造了当前世界上最大的两艘非自航抓斗挖泥船“五祥”和“东祥”(液压闭斗),斗容最大可达200 m3[2-3]。
随着疏浚工程向大型化、复杂化发展,对疏浚施工质量要求越来越高,尤其大型基建工程(如岛隧工程)对施工精度要求非常高,如港珠澳大桥岛隧工程沉管基槽疏浚工程要求在-45 m水深条件下沉管基槽不能超深0.5 m[4],施工后海底平整度要求也非常高。由于大型抓斗挖泥船配置有“自动整平挖掘”功能[5]且具有大挖深,较易实现高精度开挖大型沉管隧道深基槽这类特殊工程,抓斗挖泥船在现代工程中显得越来越重要。由于疏浚抓斗的特殊性,有必要进行深入研究,更有效地发挥其作用,在特殊工程(如岛隧工程其中的沉管基槽疏浚工程)上发挥其优势。
1 重力抓斗特点及其结构模型
疏浚抓斗根据闭斗动力源的不同,可分为液压抓斗和重力抓斗(即绳索抓斗,利用钢丝绳牵引闭合抓斗)。重力抓斗结构相对简单,对作业工况适应性强,实际应用范围广泛。其中长撑杆双颚板结构的四绳索抓斗应用历史较长,积累使用经验较多,故本文以现有的长撑杆双颚瓣30 m3重力抓斗(质量90 t)为研究对象进行仿真分析,获得抓斗作业过程中的主要特性。
疏浚重力抓斗由上滑轮组、下滑轮组、撑杆和斗颚组成。抓斗通过自身重力产生下沉力,并通过机械结构和滑轮组产生抓取力矩,克服抓取过程中的抓取阻力,完成泥土抓取。由于抓斗闭斗速度较慢,分析过程中忽略速度对挖掘阻力的影响。该重力抓斗作业理图如图1所示。

图1 重力抓斗结构理图Fig.1 Structural schematic diagram of gravity grab
在抓斗作业过程中,重力抓斗在重力作用下打开,然后下降到泥层中;开闭斗钢丝绳收紧合拢抓斗,闭斗过程中吊斗钢丝绳始终处于松弛状态;当抓斗完全闭合时,吊斗钢丝绳和开闭斗钢丝绳同时进行向上收紧,把抓斗提出水面并旋转至卸泥区;然后,开闭斗钢丝绳释放打开抓斗卸泥。一般抓斗挖泥船的吊斗钢丝绳和开闭斗钢丝绳由同一动力源驱动,吊斗钢丝绳和开闭斗钢丝绳只能以同一速度同时提升或下降,而不能获得异步运动或反向运动。
根据重力抓斗的运动规律和土力学理,抓斗在运动过程中主要受到刃口和侧刃的切入阻力、摩擦力、黏聚力和推压阻力[6]等的作用。重力抓斗各个部件结构左右基本对称,而2个斗颚结构和质量分布存在着微小差异,质量以及重心分布不完全一样,但与总体重量相比可忽略,故本文假设抓斗左右完全对称。抓斗闭合过程中外部受力示意图如图2所示。

图2 抓斗各部件受力示意图Fig.2 Force diagram of grab parts
图2中:F1为斗颚水平刃口切入阻力,kN;F2为斗颚两侧倾斜刃切入阻力,kN;F3为斗内泥沙沿斗底板移动时的水平推压阻力,kN;F4为斗颚板外侧受到的摩擦阻力,kN;F5为斗颚板外侧受到的黏聚力,kN;Q为进入斗内泥土重量,kN;Q1为撑杆重量,kN;Q2为下滑轮组重量,kN;Q3为上滑轮组重量,kN;Q4为斗颚重量,kN;Fd为上滑轮组总拉力,kN;Fu为下滑轮组总拉力,kN。
抓斗吊斗钢丝绳固定端安装在上滑轮组,其中滑轮组总拉力Fu可以按式(1)计算得出。
Fu=F(dm-1)+F (1)式中:m为贯穿上下滑轮组的绳索数;F为抓斗闭斗钢丝绳拉力,kN。
根据抓斗受力特点和各力的计算方法,可以利用编程软件,建立每个开度下的受力平衡方程,计算出各开度下的挖掘深度;本文则利用虚拟样机模型进行实时仿真,简化计算,并能准确反映抓斗的运动过程。
2 基于虚拟样机的抓斗模型
疏浚重力抓斗挖掘时,受物料的重度、内摩擦角、黏聚力和抓斗本身结构等因素的影响。本文采用的虚拟样机抓斗模型,均忽略连接部件间的摩擦力、具体形状结构的影响和抓斗斗颚切入速度对挖掘阻力的影响。在挖掘过程中实际进入斗颚内的物料高度无法确定,计算过程中近似取挖掘深度为计算深度,并假设斗内物料表面为基本水平,堆积点位于侧刃上。物料于斗内的重量根据抓斗挖掘深度,用梯形面积近似替代计算。基于上述假设、抓斗主要结构参数和受力分析,建立如图3虚拟模型。抓斗挖掘过程中,挖掘阻力均为被动力,在模型中使用摩擦力矩等效相应的被动力矩,作用力则等效到下滑轮组。
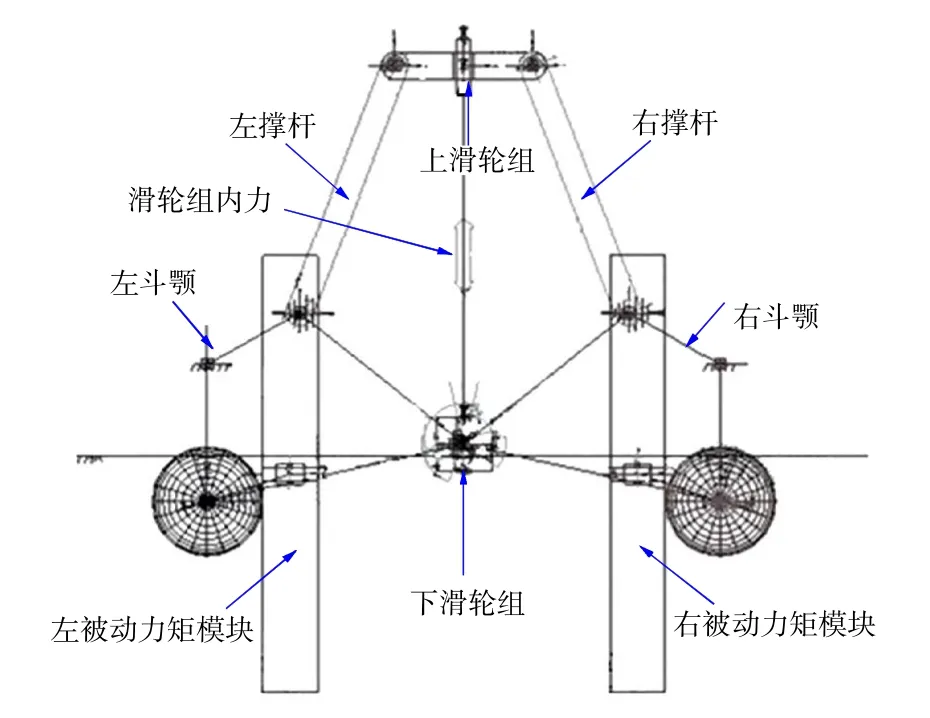
图3 抓斗虚拟样机模型Fig.3 Grab virtual prototype model
根据抓斗设计常规,抓斗重量分布比例为:上滑轮组0.17,下滑轮组0.19,斗颚0.5,支撑杆0.14,则抓斗各个部件重量分别为:149.9 kN、167.8 kN、441 kN和123.5 kN。疏浚抓斗挖掘过程在水下完成,故仿真过程中各个部件的重量均减去水的浮力。
3 抓斗虚拟样机的仿真分析
抓斗虚拟样机的仿真分析主要研究各个参数对抓斗刃口的运动轨迹线影响,从而获得挖掘量对各个参数的敏感度。仿真过程中选用沙土的主要参数为[7]:内摩擦角φ=39毅,沙土与钢板摩擦角δ=26毅,密实沙土重度t=2.2 t/m3。抓斗颚板刃口厚度为300 mm并安装斗齿,则水平刃口切入阻力有所减小,阻力系数选K=0.8[8],故模型仿真过程中使用的刃口厚度参数为240 mm。
3.1 黏聚力对挖掘曲线的影响
分别使用不同的黏聚力参数对模型进行仿真,得到不同黏聚力对抓斗挖掘曲线的影响结果(见图4),其中,图4(a)为抓斗刃口轨迹线,图4(b)为抓斗开闭斗钢丝绳闭合力曲线。
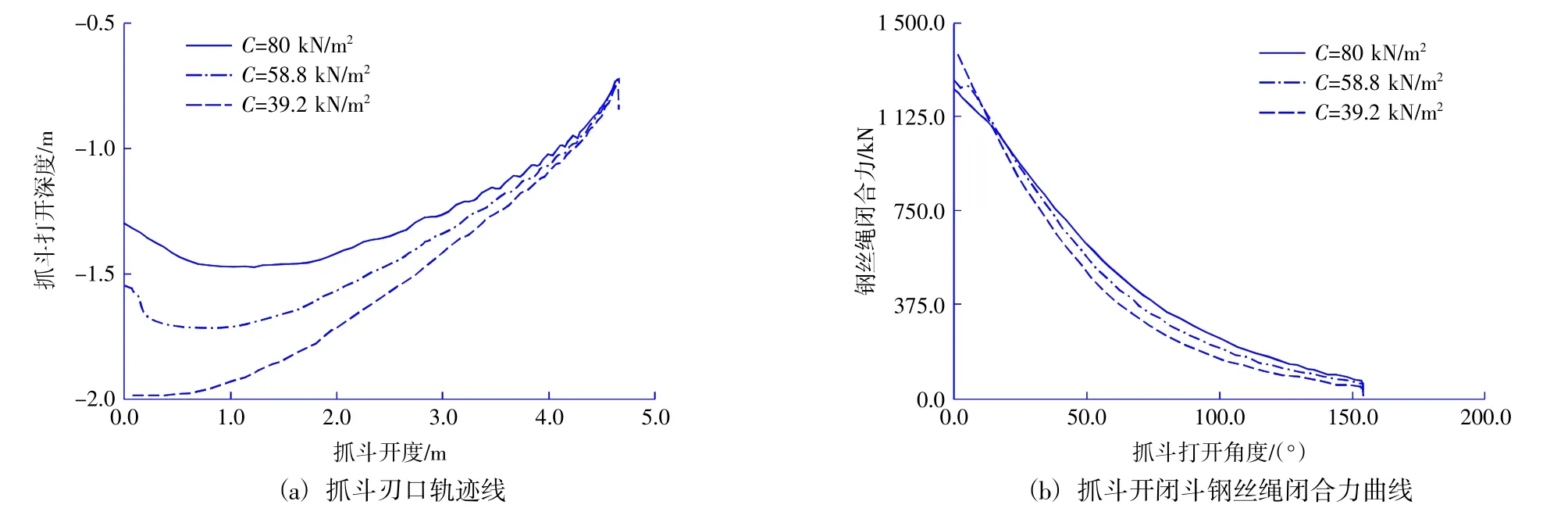
图4 黏聚力对抓斗挖掘曲线的影响Fig.4 Effect of cohesion on grab dredging curve
从抓斗运动轨迹线(由于抓斗是对称两瓣结构故只显示右瓣抓斗刃口轨迹线,以下同)和开闭斗钢丝绳闭合力曲线可以看到,由于抓斗采用了多级滑轮增加闭合力,挖掘量比设计量30 m3要多,抓斗的储备挖掘能力较大,有利于开挖硬质沙土和强风化岩土等硬物。抓斗刚开始挖掘时,开闭斗钢丝绳提升力非常小,挖掘力由抓斗自重完成。随着上下滑轮组相对位移的增大,挖掘力不断增加,并在闭斗终了时约等于抓斗和挖掘物料的重量。从3组刃口挖掘曲线可以看到,黏聚力对抓斗产量和开闭斗钢丝绳闭合力影响较大,其大小与产量成反比。当黏聚力减少时,抓斗挖掘量迅速增加,使得闭合力矩和开闭斗钢丝绳闭合力增大。在图4(b)中,黏聚力C=39.2 kN/m3的曲线,开闭斗钢丝绳闭合力在经过曲线的某个点后比其他两组曲线大,并持续增加,这是挖掘量不断增加的因,应尽量避免,防止挖掘机超负荷工作。在图4(a)中,抓斗均需提升一段小距离后才开始闭合。这是由于初始挖深过大,闭合阻力过大,抓斗需要垂直提升一段距离,使闭合阻力减小到与挖掘力相等后才能开始闭合。
3.2 抓斗斗齿对挖掘曲线的影响
为了减小挖掘阻力,抓斗斗颚刃口上通常装有斗齿,分析过程中分别使用挖掘阻力系数K=1和K=0.8进行仿真,得到刃口挖掘轨迹曲线。可以分析得出,合理安装抓斗斗齿可大大减少挖掘阻力,增大初始挖掘深度,提高挖掘产量。
3.3 抓斗开闭斗钢丝绳收紧速度对挖掘曲线的影响
抓斗闭合过程中,开闭斗钢丝绳收紧,带动上下滑轮组相对运动,从而使抓斗闭合。图5是下滑轮组在不同提升速度下的挖掘曲线,速度分别为0.05 m/s、0.1 m/s、0.3 m/s,即开闭斗钢丝绳的收紧速度为0.3 m/s、0.6 m/s、1.8 m/s。可见,在开闭斗钢丝绳收紧的设计速度范围内,下滑轮组提升速度对挖掘量影响不大,3组挖掘曲线基本重合。在抓斗接近闭合终了时,其斗颚闭合角速度受下滑组提升速度影响较大,小幅度的下滑轮组运动可产生大角度的斗颚运动,故3组曲线在接近完全闭合区域存在一定的差异。
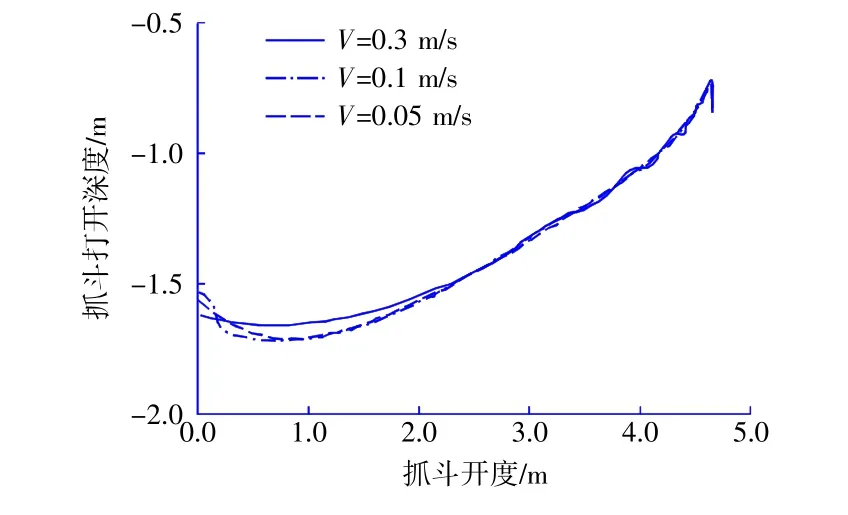
图5 下滑轮组不同提升速度的挖掘曲线Fig.5 Dredging curve of lower pulley block with different lifting speed
3.4 抓斗部件重量对挖掘曲线的影响
分别在上滑轮组、下滑轮组和斗颚等部件上增加10 t重量,仿真获得3组挖掘曲线。上滑轮组、下滑轮组和斗颚上分别添加重量的挖掘曲线几乎重合,均使挖掘力增大,挖掘量比来抓斗大。采用多组滑轮组来增加闭合力,有效地利用了各个部件的重量,使挖掘量几乎不受重量分布位置的影响,并趋于相同。
假设抓斗其它参数不变,仅改变滑轮组数(抓斗上下滑轮组贯穿绳索数分别为m=6和m=4),通过模型仿真得到2组挖掘曲线。2组曲线相差甚大,上下滑轮组贯穿绳索数对挖掘力和挖掘量影响非常大,减少1组滑轮组和2根贯穿的绳索数,挖掘力将减小,挖掘量迅速降低,影响施工效率。故在抓斗自重相同情况下,上下滑轮组结构对挖掘力大小起到极为关键的作用。
3.5 其它挖掘情况分析
在一些特殊的挖掘操作过程中或定深挖掘的时候,有可能令吊斗钢丝绳到达一定深度后处于拉紧状态。利用模型对此类挖掘情况进行仿真,所得到挖掘曲线与吊斗钢丝绳处于松弛状态的挖掘曲线有存在较大差异,挖掘量相对很低。一般在施工中应避免此类低挖掘量的操作。
对于某些挖掘施工工艺,要求挖掘平面尽量平坦,此时抓斗的挖掘过程受力较为复杂,挖掘阻力作用方向变换频繁。本文抓斗虚拟样机模型的仿真仅对挖掘轨迹的分析具有实际指导意义,而抓斗整体上下运动的挖掘过程误差较大,但模型仍具有一定的参考和指导意义。由于来的模型并不完全适用于平整挖泥[9]的仿真分析,需要修改虚拟模型,增加吊斗钢丝绳受力模型。利用新建模型进行平整挖泥仿真,得到如图6所示的平整挖泥曲线图。对于不同的初始挖掘深度,如果挖掘深度过大(D=-1.0 m),开闭斗钢丝绳收紧后并不能立刻闭合,当整个抓斗上升一定距离,挖掘阻力减少到一定程度后挖掘过程才开始,此时挖掘轨迹的最高和最低点的高度差相对较大。当挖掘深度较小(D=-0.7 m),斗颚从开闭斗钢丝绳收紧后便开始闭合,挖掘过程较为平滑,与设计挖掘过程较为相似,挖掘曲线最高和最低点高度差相对较小。在实际施工中,平整挖泥的初始挖掘深度应根据现场土质机械特性进行调整,防止过大初始挖深,减小挖掘平面的额外高度差,并在水平轨迹高度差可控的前提下,尽量提高挖掘效率。
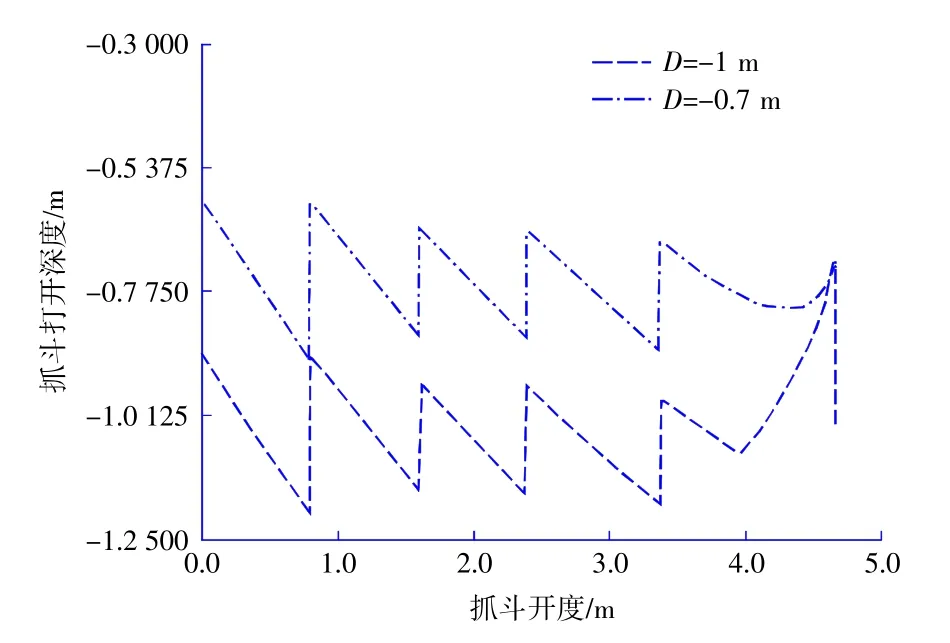
图6 修改后抓斗虚拟样机的挖掘曲线Fig.6 Dredging curve of modified grab virtual prototype
4 结语
通过上述抓斗虚拟样机的仿真计算,可分析得出以下初步结论:
1)该30 m3疏浚重力抓斗(质量90 t)在一般密实黏土工况下,挖掘量均超出设计标准,挖掘储备能力非常大,其设计工况更适用于较为密实沙土或碎岩等恶劣施工环境。安装合理的斗齿结构可进一步减低阻力,提高挖掘能力。在挖掘过程中,过大的初始挖掘深度将延迟抓斗的实际开始闭合时间,使抓斗提升到一定的挖掘深度后才能闭合。此类情况对水平挖掘作业的平坦度具有较大影响,操作过程中应尽量避免。当沙土垂直承压大,切向压强较小等情况下,提高抓斗下降速度获得的大初始挖深才有明显的增产效果。在实际施工中应该测量现场的土质参数,或进行现场挖掘试验,掌握精确的挖掘过程,以制定合理的施工工艺。
2)重力抓斗主要挖掘力来源于自重和滑轮组的增力结构。对于特殊硬质沙土或岩石等工程,可以适当增加自重,增大挖掘力,克服较大岩土阻力来获得产量的提升。基于此理论可设计特殊的重型石斗,应用于开挖中风化岩、强风化岩等碎岩工程。抓斗的滑轮组在增大挖掘力的同时也降低了开闭斗时间,合理的滑轮组数应满足工程需要,兼顾效率和挖掘能力。
本文的疏浚重力抓斗虚拟样机模型在仿真过程中选取对挖掘量影响较大的机械结构参数和沙土力学参数进行研究,由模型输出刃口挖掘曲线,预测挖掘产量和挖掘时间,可为生产提供理论参考。准确的产量预测和精确的施工时间估算有赖于现场土质数据的采集和分析。利用具体的土力学参数结合理论模型才能精确模拟现场的挖掘过程,从而合理地指导现场的施工安排和挖掘操作。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
金刚石与磨料磨具工程(2021年5期)2021-11-06
初中生学习指导·提升版(2020年5期)2020-09-10
制造技术与机床(2017年7期)2018-01-19
南水北调与水利科技(2016年5期)2016-12-27
山东工业技术(2016年15期)2016-12-01
科技视界(2016年7期)2016-04-01
湖南大学学报·自然科学版(2015年5期)2015-06-16
Beijing Review(2013年10期)2013-12-06
扬子江诗刊(2011年2期)2011-08-15