高空长航时无人机用发动机推力需求及技术特点分析
2021-08-01 03:09于广民王奉明
燃气涡轮试验与研究 2021年6期
于广民,王奉明,卢 娟
(1.中国航空发动机集团有限公司,北京 100097;2.中国航空发动机研究院先进航空动力创新工作站,北京 101304)
1 引言
高空长航时无人机通常是指飞行高度超过18 km 且持续飞行24 h 以上的无人驾驶飞机,相比于低轨卫星、有人驾驶飞机、高空飞艇等具有侦察功能的飞行器,其具备任务高度范围广、滞空时间长、机动能力强、使用和维护成本低廉等综合优势,被广泛应用于军事和民用领域,执行侦察监视、搜索跟踪、灾情勘测、气象研究等任务[1-3]。
由于高空长航时无人机特定的飞行任务属性及其高空低雷诺数工作环境的特殊性要求,其配套动力通常需要具备以下几个特征:一是要具备较高推重比、低耗油率能力,以支撑飞机实现较强的载荷能力以及在携带燃油量一定的情况下实现较长的滞空时间。二是要具备可靠、稳定的高空工作能力,以应对高空低雷诺数环境下部件效率降低、流通能力衰减导致的喘振边界下移问题。研究表明,发动机高压压气机的喘振裕度在高空环境下只有在地面环境下的35%左右[4],压气机中间级放气是提高喘振裕度的重要方法[5]。三是要具备支持大功率提取的能力,以满足无人机更高的用电需求及机载定向能武器的功率需求。
“全球鹰”无人机是高空长航时无人机的典型代表,最大飞行高度超过20 km,巡航空速650 km/h(马赫数约0.6)[6]。本文以“全球鹰”无人机为例,对高空长航时无人机用发动机的推力需求及技术特点进行分析,以期为高空长航时无人机动力方案设计提供输入和指导。
2 高空长航时无人机推力建模与分析
2.1 高空长航时无人机任务剖面
“全球鹰”无人机作战任务剖面如图1所示。主要由地面起飞(起飞滑跑距离1.524 km)、加速爬升(爬升高度至15.240 km,最大爬升水平距离370 km)、巡航爬升(爬升高度至19.812 km,直线爬升距离2 222 km)、盘旋巡航(巡航高度19.812 km,24 h 扫描,扫描覆盖范围103 600 km2)、退出段、下滑段以及降落段等阶段组成。

图1 “全球鹰”无人机作战任务剖面[7]Fig.1 Operational mission profile of the Global Hawk
典型任务剖面与发动机工作状态的对应关系如下:起飞阶段——发动机以起飞/最大状态工作;加速爬升阶段——发动机以爬升/额定状态工作;巡航爬升阶段——发动机以额定-巡航状态工作;巡航平飞阶段——发动机以巡航状态工作。
2.2 典型任务阶段需求推力计算模型
通过选取飞机典型任务剖面进行推力需求分析,为发动机的性能设计提供输入。选取起飞、爬升、巡航等3个典型任务阶段进行分析,建立发动机需求推力计算模型。
2.2.1 起飞阶段
起飞阶段可分为两个阶段,从接到起飞指令、油门推到最大到飞机前轮开始抬起为第一阶段,飞机前轮开始抬起到飞机离地为第二阶段。起飞过程示意如图2所示。图中,d1为飞机起飞第一阶段滑跑距离,d2为飞机起飞第二阶段滑跑距离,V为飞机速度。

图2 飞机起飞过程示意图Fig.2 Schematic diagram of aircraft take-off process
在第一阶段,飞机滑跑速度从0开始逐渐加速,直至飞机前轮离地开始产生迎角,此时滑跑速度约为0.7~0.9 倍起飞安全速度(借鉴英、美定义方式,本文起飞安全速度为飞机离地高度15 m 时对应的飞机速度),飞机受力分析如图3所示。
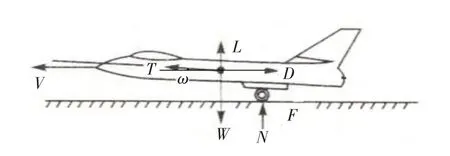
图3 飞机起飞第一阶段受力分析Fig.3 Force analysis of aircraft in the first stage of take-off process
以地面为X轴、垂直于地面为Y轴建立坐标系对飞机进行受力分析。有:

式中:T为需求推力,m为飞机质量,dV/dt为飞机加速度,D为飞行阻力,F为飞机摩擦力,N为地面支持力,W为飞机重力,L为飞机升力,f为摩擦系数。L=(d/d1)W,d为飞机离地前某时刻的滑跑距离。
在第二阶段,飞机滑跑速度从0.7~0.9 倍起飞安全速度逐渐加速到起飞安全速度,飞机前轮抬起,飞行迎角从0°逐渐变大直至飞机离地15 m,此时飞机受力分析如图4 所示。图中,ω为发动机安装角,一般为1°~2°,计算时可以忽略不计。则有:

图4 飞机起飞第二阶段受力分析Fig.4 Force analysis of aircraft in the second stage of take-off process


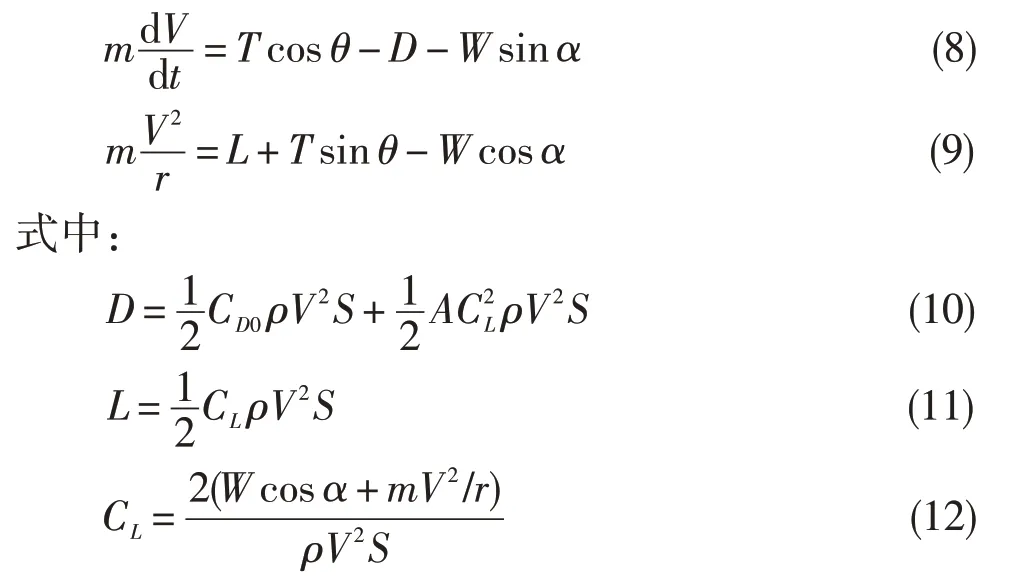
联合公式(3)~(5)推导可得:

式中:θ为飞行迎角。
起飞阶段发动机油门杆通常处于最大状态,起飞过程中飞机升力和飞行阻力的变化如图5 所示。此时,飞行阻力平行于飞机飞行方向,可计算为:
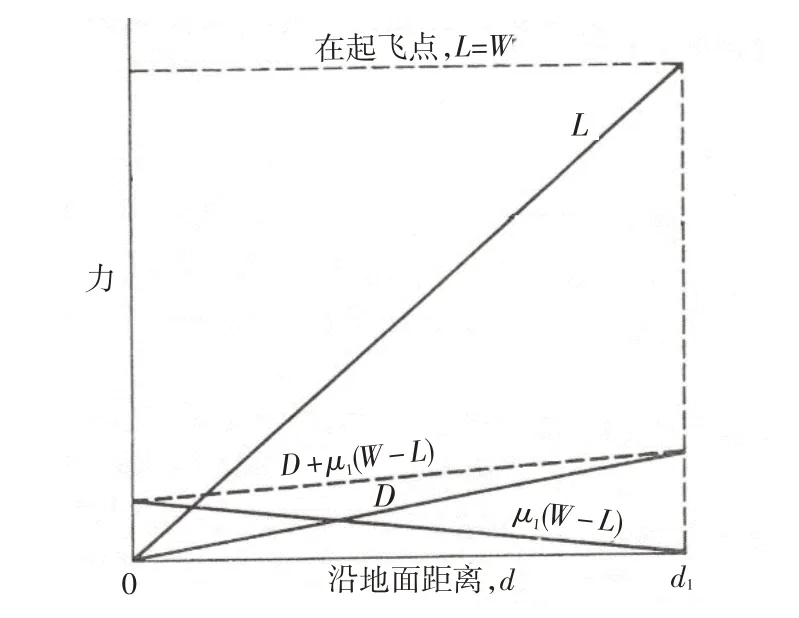
图5 飞机起飞过程受力变化示意图Fig.5 Schematic diagram of force change during aircraft take-off process

式中:CD0为零升阻力系数;S为机翼面积;A为与飞机气动外形相关的计算过程参数,A=1/(πeR),e为OSWALD 系数(通常取0.80~0.95,该数值在亚声速条件下可认为基本不变,在超声速后会逐渐变小),R为机翼展弦比且R=b2/S;k为地面效应修正因子,用于表征飞机在近地面飞行时下降流和连带诱导阻力的影响,k=(16h/b)2/(1+(16h/b)2),h为机翼距地面高度,b为翼展长度;CL为升力系数,CL=L/(0.5ρV2S),ρ为大气密度。
2.2.2 爬升阶段
爬升阶段通常是从高度几百米爬升到10 000 m以上,在低空小表速爬升阶段,飞机的飞行迎角大,航迹角小,但随着爬升速度的增加,其飞行迎角变小,航迹角逐渐变大。爬升通常有两种方式,一种是最快爬升方式,此时发动机通常处于最大状态;另一种是经济爬升方式,此时发动机通常处于爬升状态。爬升阶段受力分析如图6所示。

图6 爬升阶段飞机受力分析Fig.6 Force analysis of aircraft in the climbing process
以飞行途径为X轴、垂直于飞行途径为Y轴建立坐标轴,对飞机进行受力分析。有:
其中:r为飞行半径(自地心算起的半径,等于地球半径与飞行高度之和),α为航迹角。
推力计算式为:

2.2.3 巡航阶段
飞机在空中巡航通常也有两种方式,一种是最大巡航,一种是经济巡航。经济巡航时,发动机工作在最省油状态,飞机通常保持在某个迎角以确保产生的升力等于重力,飞行表速增加,迎角逐渐越小。巡航阶段飞机受力分析见图7。

图7 巡航阶段飞机受力分析Fig.7 Force analysis of aircraft in the cruise process
以水平方向为X轴、垂直于水平为Y轴建立坐标系,对飞机进行受力分析。有:推导得:


联合公式(16)、(17)、(18),推力迭代计算式为:

2.3 计算结果及分析
基于建立的飞机推力计算模型,编制了面向作战任务需求的发动机性能需求计算程序,并针对典型任务阶段开展了仿真计算与敏感度分析。
2.3.1 起飞阶段推力需求分析
分析可知,起飞过程中飞机速度很低,升力和阻力系数相对较小,对发动机性能有显著影响的因素有飞机起飞质量与起飞滑跑距离。下面分别针对这两个因素对推力的影响进行敏感度分析。
假定飞机初始起飞质量为12 000 kg,起飞地面滑跑距离为665 m,起飞地面滑跑时间为23 s,起飞离地速度为55.3 m/s,飞机离地迎角为10°,并以此为计算输入条件进行起飞需求推力计算。
(1) 飞机起飞质量对推力影响的敏感度分析。
保持其他条件不变,仅改变飞机起飞质量,分别为11 000 kg、12 000 kg、13 000 kg,计算得到的需求推力如图8 所示。可以看出,随着飞机起飞质量的增加,对发动机推力需求也明显增加,飞机起飞质量每增加100 kg,发动机推力需求约增加300 N。
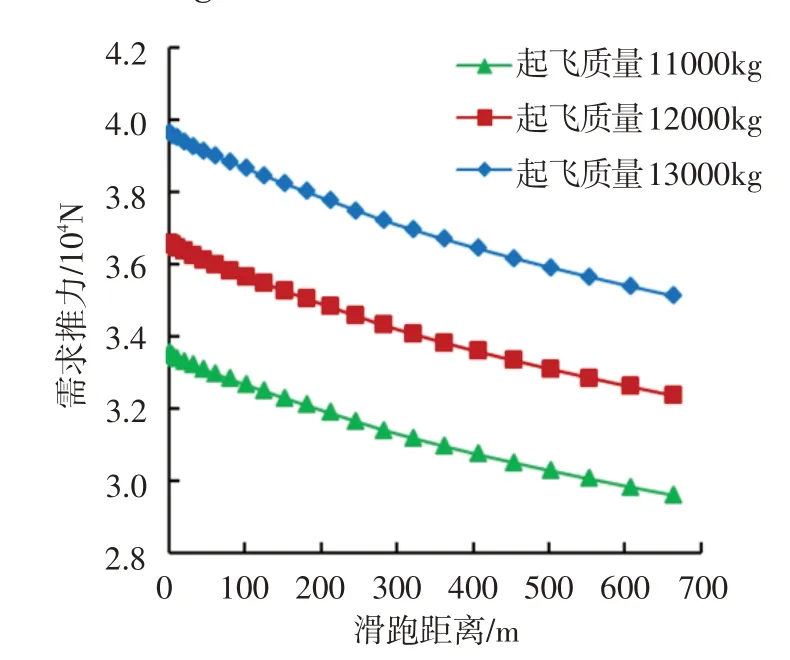
图8 起飞阶段飞机起飞质量对发动机推力需求的影响Fig.8 Influence of aircraft take-off quality on thrust requirement in the take-off process
(2) 滑跑距离对推力影响的敏感度分析。
保持其他条件不变,仅改变飞机起飞滑跑距离,分别为665 m、800 m、1000 m,计算得到的需求推力如图9所示。可见,起飞滑跑距离越短,对发动机推力需求越大。起飞滑跑距离从665 m 延长至800 m时,起飞滑跑距离每增加1 m推力需求约降低50 N;起飞滑跑距离从800 m延长至1 000 m时,起飞滑跑距离每增加1 m推力需求约降低10 N。

图9 起飞阶段滑跑距离对发动机推力需求的影响Fig.9 Influence of running distance on thrust requirement in the take-off process
上述分析可知,在起飞阶段对发动机性能有显著影响的因素有飞机起飞质量和起飞滑跑距离,因此飞发协调设计时,发动机方需要注重对飞机起飞质量的约束,并研究清楚飞机部署机场跑道情况,在机场条件允许的情况下适当增加滑跑距离可以有效降低发动机起飞推力需求,从而降低发动机研发难度和技术风险。
2.3.2 爬升阶段推力需求分析
分析可知,爬升任务阶段对发动机性能有显著影响的因素有飞机起飞质量和爬升加速度/爬升角度,其中后者可以采用爬升率来综合反映。
假定爬升开始高度为200 m,爬升结束高度为15 000 m,起始爬升马赫数为0.38,结束爬升马赫数为0.50,对爬升推力进行分析。
(1) 飞机起飞质量对推力影响的敏感度分析。
爬升时间为900s,飞机起飞质量分别为11 000kg、12 000 kg、13 000 kg 时,计算得到的需求推力如图10 所示。可见,随着飞机起飞质量的增加,发动机推力需求增大;随着爬升高度的增加,由飞机起飞质量差异引起的发动机推力需求差异逐渐变小。
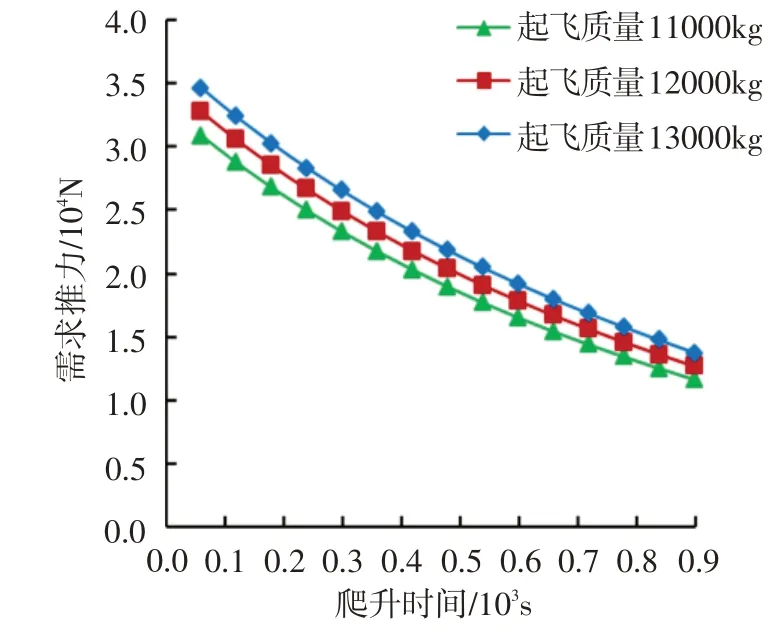
图10 爬升阶段飞机起飞质量对发动机推力需求的影响Fig.10 Influence of aircraft take-off quality on thrust requirement in the climbing process
(2) 爬升率对推力影响的敏感度分析。
飞机起飞质量为12 000 kg,爬升时间分别为850 s、900 s、950 s 时,计算得到的需求推力如图11所示。可见,随着爬升高度的增加,爬升率对推力需求的影响越来越显著。在确定的飞机气动布局条件下,在高度10 000~15 000 m区间范围内,当爬升率由17.98 m/s调整为15.47 m/s时,发动机推力需求降低了约40%。

图11 爬升阶段爬升率对发动机推力需求的影响Fig.11 Influence of climb rate on thrust requirement in the climbing process
上述分析可知,爬升阶段对发动机性能影响最显著的因素是爬升率,对于不需要急速爬升的高空长航时无人机,适当降低爬升率指标或采用分段爬升的方式有利于实现较远航程,同时可以有效降低发动机推力需求和研发难度。
2.3.3 巡航阶段推力需求分析
分析可知,飞机巡航时发动机推力需求与飞机起飞质量、飞行速度、飞机升阻比、飞行迎角有关,其中对推力需求影响较为显著的因素是飞机升阻比、飞行速度和飞机起飞质量。飞机升阻比和飞行速度与飞机翼型设计相关,发动机的最佳工作区域应涵盖飞机高升阻比区域。
假定巡航高度为18 000 m,巡航马赫数为0.5,巡航时间为24 h,消耗燃油质量为4 500 kg,并以此为计算输入条件进行需求推力计算。
保持其他条件不变,仅改变飞机起飞质量,分别为13 000 kg、12 000 kg、11 000 kg,计算得到的需求推力如图12所示。可以看出,随着飞机起飞质量的降低,发动机推力需求减少,且在巡航过程中,由于燃油消耗飞行质量持续降低,发动机巡航推力需求变化较大,变化范围达32%~35%。

图12 巡航阶段飞机起飞质量对发动机推力需求的影响Fig.12 Influence of aircraft take-off quality on thrust requirement in the cruise process
上述分析可知,由于高空长航时无人机巡航时间较长,巡航过程中随着燃油量的消耗飞行质量逐渐降低,发动机推力需求变化较大。因此,在高空长航时无人机发动机设计中,要注重考虑采用可实现较大范围内节流调节能力的技术手段和方法。
3 高空长航时无人机动力特性分析
3.1 AE3007H发动机设计特点
中/小型民用大涵道比涡扇发动机最接近高空长航时无人机飞机使用需求。“全球鹰”无人机动力是在艾利逊公司成熟的大涵道比涡扇发动机基础上针对高空长航时特殊使用要求改进发展的AE3007H,由1 级风扇、14 级轴流高压压气机、环形燃烧室、2级高压涡轮及3级低压涡轮组成[8]。
AE3007H发动机具有以下设计特点[9-10]:
(1) 涵道比较大。AE3007H 发动机的涵道比大约为5.0,属于大涵道比涡扇发动机。根据质量附加原理,增大涵道比是降低涡轮发动机耗油率的有效途径之一,但是为了避免发动机推力特性随高度增加而衰减过快(高空无人机的特殊要求),涵道比又不能选取过大。
(2) 风扇压比较低,核心机压比较高。AE3007H发动机采用单级风扇,压比只有1.47,而高压压气机14 级,核心机压比达16.30(F110-GE-129 发动机核心机压比仅9.41[11]),且没有压缩效果和效率较低的增压级,是适合高空长航时低耗油率的最优构型。
(3) 低压涡轮级数多,单级落压比低。AE3007H发动机低压涡轮为3 级,相比战斗机用发动机级数较多。这是因为高空长航时无人机用发动机的涵道比较大,低压转子转速较低、单级落压比小等原因所致,另外也是牺牲质量换取高效率理念的体现。
3.2 高空长航时无人机动力设计原则
结合AE3007H 设计特点及本文对高空长航时无人机进行的推力需求分析结果可知,高空长航时无人机动力设计时应遵循以下几个原则:
(1) 要与飞机及作战任务剖面进行充分优化迭代,通过与飞机气动性能、作战使用方式最佳匹配以优化发动机热力循环参数。
可基于前文仿真结果得出在不同任务阶段飞机对发动机推力需求影响因素的敏感度,并据此提出优化发动机方案,降低研发难度。在高空长航时无人机质量一定的情况下,起飞阶段对发动机推力性能影响显著的因素是起飞滑跑距离和滑跑时间,在实际设计时发动机方要与飞机方充分协调,在机场跑道允许的情况下适当增加滑跑距离可以有效降低发动机起飞推力需求;爬升阶段对推力需求影响最敏感的因素是爬升率,对于高空长航时无人机,不必像战斗机那样基于最快达到的策略进行爬升,而是应基于航程最优确定合理的爬升率,如采用分段爬升的方式,在有利于实现较远航程的同时,有效降低发动机推力需求。
(2) 发动机部件需要具备更宽的工作范围,且在高空环境下具备可接受的工作效率。
在巡航阶段,由于飞行时间长、耗油量多,飞机质量变化明显,发动机推力需要在2 500~4 500 N之间变化。除了通过飞机姿态调整外,还需要发动机高空节流特性好,以保证发动机在较大推力变化范围内仍可维持较高效率。另外,高空低雷诺数效应会引起发动机相关部件效率、通流能力等发生变化,其工作线向压气机喘振线方向移动。因此,与传统发动机相比,高空长航时无人机发动机各相关部件需要具有更宽广的工作范围、更灵活的通流调节能力,并在考虑高空低雷诺数效应的条件下具有可接受的工作效率。
(3) 针对高空长航时无人机动力地面起飞/巡航推力需求比大的工作特点,综合考虑高空推力与耗油率的设计折衷。
高空长航时无人机动力起飞推力与巡航推力差异大,地面起飞与巡航推力需求比高达10以上。若涵道比选取过大,则在满足巡航推力需求时造成地面起飞推力过大,导致发动机质量过大;若涵道比选取过小,则会在满足地面起飞推力需求的情况下造成巡航耗油率指标过大,无法支撑长航时的工作要求。因此,需要在涵道比匹配等方面进行统筹考虑,一是选取适中的涵道比进行匹配,如AE3007H涵道比选取为5.0左右,既能保证巡航耗油率较低,又可避免发动机推力特性随高度增加而衰减过快;二是压比匹配要尽量靠近循环最经济压比。
(4) 部分系统要针对高空低雷诺数环境进行特殊设计。
需要发展非气动燃油雾化能力强的燃油喷嘴。当前我国航空发动机燃油喷嘴大多采用气动燃油雾化喷嘴,由于高空环境下的空气密度只有地面的5%~10%,喷嘴内的气流速度降低、气动力变小,导致燃油雾化效果变差,影响燃烧效率。因此,高空长航时无人机用发动机中需要发展非气动力燃油雾化喷嘴,以改善发动机高空燃烧效率。如应用于J79发动机上的甩油盘式喷嘴,以及超声波燃油雾化喷嘴等新概念燃油喷嘴。
此外,需要充分考虑滑油系统的高空密封性。高空低速环境下,由于周围大气压力降低,发动机内部压力也较低,特别是受到低雷诺数影响,轴承腔和滑油箱的压力关系发生变化,导致封严失效。为防止泄漏产生,一是采取技术措施增加封严压差,一方面需要增加封严气体压力(如从高压压气机后面级引高压气),另一方面需要降低滑油腔压力(如增加回油泵的泵油能力等);二是采用新式密封,如利用接触式密封代替目前发动机中常用的非接触式密封,以克服高空低压环境对封严效果的不利影响。接触式密封有手指密封、刷式密封等[12],其中刷式密封已经在F119、PW2500等发动机上得到应用。
4 结束语
高空长航时无人机的使用特性表明,其对配套动力的需求有独特之处,最典型的是高空巡航推力调节范围大、发动机高空性能要求高,同时高空低雷诺数效应为高空长航时无人机动力设计带来了特殊困难和挑战。文中从高空长航时无人机对动力的能力需求角度出发,以“全球鹰”无人机为对象进行了发动机推力需求建模分析,并结合AE3007H发动机技术特点深入分析了高空长航时无人机动力特性,提出了高空长航时无人机发动机需要遵循的设计原则,相关敏感性参数对推力需求影响规律研究可为高空长航时无人机动力方案设计提供输入和指导。
猜你喜欢
环球时报(2022-02-28)2022-02-28
小天使·一年级语数英综合(2019年2期)2019-01-10
思维与智慧·上半月(2018年11期)2018-11-30
小天使·一年级语数英综合(2018年11期)2018-11-23
小学阅读指南·低年级版(2018年5期)2018-11-02
母子健康(2015年1期)2015-02-28
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
延河(下半月)(2014年3期)2014-02-28
数理化学习·初中版(2011年9期)2011-11-14