基于红外触发技术的外弹道目标微动参数估计研究
2021-08-06 11:08王红敏宁生科
兵器装备工程学报 2021年7期
王红敏,宁生科,董 涛
(1.西安工业大学 工业中心, 西安 710021; 2.西安工业大学 光电工程学院, 西安 710021)
1 引言
微动指外弹道目标在外力影响下出现的锥旋、摆动等运动,此运动不包含主体径向运动。外弹道目标在飞行时,常常出现诱饵,因为弹头与诱饵的质量分布存在差异,致使两者的进动周期与进动角之间不存在一致性[1-3]。此种情况下,有效估计目标的微动参数属于导弹保护系统目标识别的核心。
外弹道目标识别属于防空反导的核心,外弹道目标在弹道中飞行时间较长,为了保障姿态平稳,弹道目标在飞行时存在自旋,遭到扰动作用,弹头出现锥旋,目标的锥旋角速度低于自旋角速度[4]。为了准确估计外弹道目标微动参数,本文提出基于红外触发技术的外弹道目标微动参数估计方法,以此提取外弹道目标的微动特征与结构特征,为防空反导提供理论基础。
2 基于红外触发技术的外弹道目标微动参数估计方法
2.1 基于红外触发式数码成像的外弹道目标图像获取方法
基于红外触发式数码成像的外弹道目标图像获取方法主要使用红外触发式数码成像系统获取外弹道目标图像,具备一触发便拍照的功能[5-7],能够实时捕捉外弹道目标。
红外触发式数码成像系统使用ZORAN公司的COACH6芯片,以此构建和数码相机类似的成像子系统,COACH6属于ZORAN公司所设计具有针对性的DSP芯片。COACH6能够支持多种CCD相机和CMOS(互补金属氧化物半导体),支持很多记忆卡类型。且在成像子系统里使用合理的CMOS传感器、SDRAM(同步动态随机存取内存)、NAND FLASH存储器[8]。
为了完成自主触发,红外触发式数码成像系统使用热释电红外传感器建立硬件触发模块,此模块中也采用菲涅尔透镜,实现外弹道目标捕捉聚焦[9-11]。系统结构框图如图1所示。

图1 红外触发式数码成像系统结构框图Fig.1 Schematic diagram of infrared triggered digital imaging system
如图1所示,红外触发式数码成像系统通过前端红外检测模块,完成外弹道目标检测,通过成像子系统获取外弹道目标图像,MCU属于系统的中枢神经,用于控制系统实现外弹道目标检测与拍照,拍照结果中会对目标进行标注,最后呈现于LCD(液晶显示器)中。
2.2 基于红外触发式数码成像的外弹道目标微动参数估计方法
2.2.1外弹道目标在红外触发式数码成像平面中投影关系
假定φ是红外触发式数码成像系统所获取外弹道目标图像中目标的初始相位,O-XYZ为外弹道目标在红外触发式数码成像中的坐标系。那么红外触发式数码成像中外弹道目标的锥体顶点B在坐标系O-XYZ里坐标是:
(xB,yB,zB)=(|OB|sinα(φdt+φ),
-|OB|sinαcos(φdt+φ),|OB|cosα)
(1)
其中:φd是外弹道目标锥旋运行的角速度;外弹道目标的质心是旋转中心O;α是自旋轴和锥旋轴的夹角;t是锥旋时间。根据以上参数信息,制作外弹道目标空间位置模型。图3是在坐标系O-XYZ范围内,以外弹道目标的锥体顶点B为中心而设计的空间位置模型示意图。
图2中,m是法线;θ是目标和红外触发式数码成像系统的俯仰角,r是外弹道目标锥旋时底面半径。根据图2模型研究红外触发式数码成像系统所获取外弹道目标图像中目标的空间几何关联性,能够获取目标运行时,锥体散射点在成像平面中的坐标,下文将围绕锥体顶点B实施推导。O-X′Y′Z′为外弹道目标在红外触发式数码成像中投影的坐标系,B点在成像平面X′OY′中投影是B′,B′在空间里的坐标是:
图2 外弹道目标空间位置模型示意图
(xB′,yB′,zB′)=(xB,yB,zB)-((xB,yB,zB)·m)·m=
(xB·yBsin2θ+zBsinθcosθ,zBsin2θ+yBsinθcosθ)
(2)
式中,m为沿着法线的矢量。散射点在红外触发式数码成像中坐标通过散射点在空间里Y、Z轴中位置设置,那么B′在红外触发式数码成像平面中坐标能够近似成:
(3)
其中,散射点在投影平面中有关X轴、Y轴的坐标是(xB-q,yB-q)。
按照锥体顶点B的位置,能够把外弹道目标近视点q在空间里的坐标描述成:
(4)

则近视点q在红外触发式数码成像平面中坐标能够描述成:
(5)
根据以上算法,得出外弹道目标与投影平面的几何关系,图3是在X′OY′成像平面中外弹道目标的投影情况。

图3 外弹道目标与投影平面的几何关系示意图
通过基于红外触发式数码成像的外弹道目标图像获取方法,对微动参数进行估计,提取外弹道目标微动特征和结构特征。
2.2.2微动特征和结构特征估计
红外触发式数码成像的初始成像时间设成t0,通过自相关法粗估计微动周期,获取锥旋周期分量Td,Td=mdΔt,md描述粗估计后续周期中红外触发式数码成像序列的数量,红外触发式数码成像的成像时间平均值是Δt。
本文使用灰度匹配算法实现红外触发式数码成像匹配与目标特征提取。详细流程是:

2) 精估计阶段,通过简化的归一化积相关度量方法,依次提取候选子图,在它的扩展区间中实施灰度匹配[13-15]。运算外弹道目标点(a,b)中归一化积相关系数,a、b依次描述目标点像素。
(6)
其中,n×n的模板图是Yj,i,n×n的基准图是Xj,i;外弹道目标散射点的种类与幅数是j、i。
3) 获取最优匹配结果的序列号md,则重新估计的锥旋周期分量是Ti=mdΔt。
B′点在红外触发式数码成像的X轴中坐标和在空间里X轴中坐标不存在差异。构建参考坐标系o-xy。假定在红外触发式数码成像序列里得到的点坐标集是:
(7)
其中,外弹道目标散射点的种类是j。将第i幅外触发式数码成像和初始时刻间隔作为分析目标Δyi,则:
kssinα(acosφ+bsinφ)
(8)

(9)
使用式(9)能够获取结构特征未知变量kssinα。
在红外触发式数码成像平面中,投影轨迹有关YOZ平面对称,散射点在空间里的旋转轨迹中心处于Z轴,旋转轨迹中心在外弹道目标序列像中散射点投影轨迹的对称轴中,按照红外触发式数码成像平面序列周期性,使用间隔半个周期的红外触发式数码成像规则,在红外触发式数码成像序列中能获取2个目标点的距离pAn:
(10)

(11)
其中,μ是近视点像素。解得:
(12)

3 仿真及结果分析
为了测试本文方法对外弹道目标微动参数估计的有效性,在MATLAB软件中建立仿真成像场景两组,分别为单目标模拟场景和多目标模拟场景,各组30个目标点随机设置,随机抽取其中一组目标点场景如图4、图5所示。

图4 外弹道单目标模拟场景图
使用本文方法获取图4、图5中外弹道目标图像时,设置红外触发式数码成像系统中参考坐标系O-XYZ里方位角与俯仰角依次是90°与30°。初始相位设成15°,锥高设成3.0 m,底面半径设成1.0 m,进动角设成20°,锥旋频率设成2πrad/s,目标质心和顶点间距在1.0~10.0 m随机取值。
如图6、图7所示,本文方法可使用红外触发式数码成像系统准确获取外弹道单目标、多目标图像,且拍照结果中会对目标进行标注,有效缩小获取微动参数估计的范围,优化估计精度与效率。

图6 外弹道单目标图像
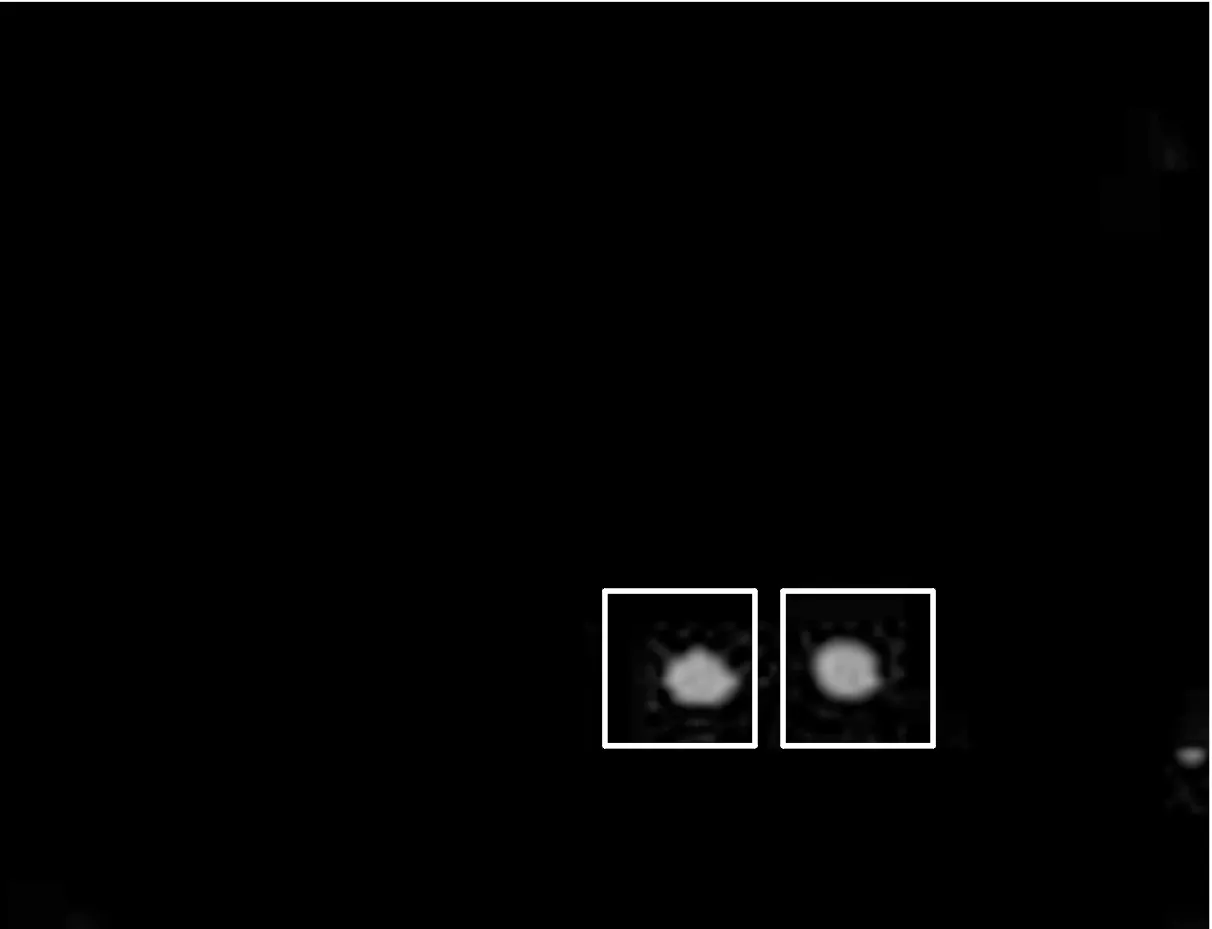
图7 外弹道多目标图像
成像效果对外弹道目标微动参数估计精度存在一定影响,若外弹道目标成像模糊不清,则目标检测精度较差。为了测试本文方法在提取外弹道目标图像时的鲁棒性,在外弹道目标图像中引入噪声,此噪声点是模拟天气条件对成像系统的干扰所出现,测试本文方法在噪声环境下,对图像中目标的标注结果,以此测试本文方法是否可有效获取外弹道目标有效图像。结果如图8所示。
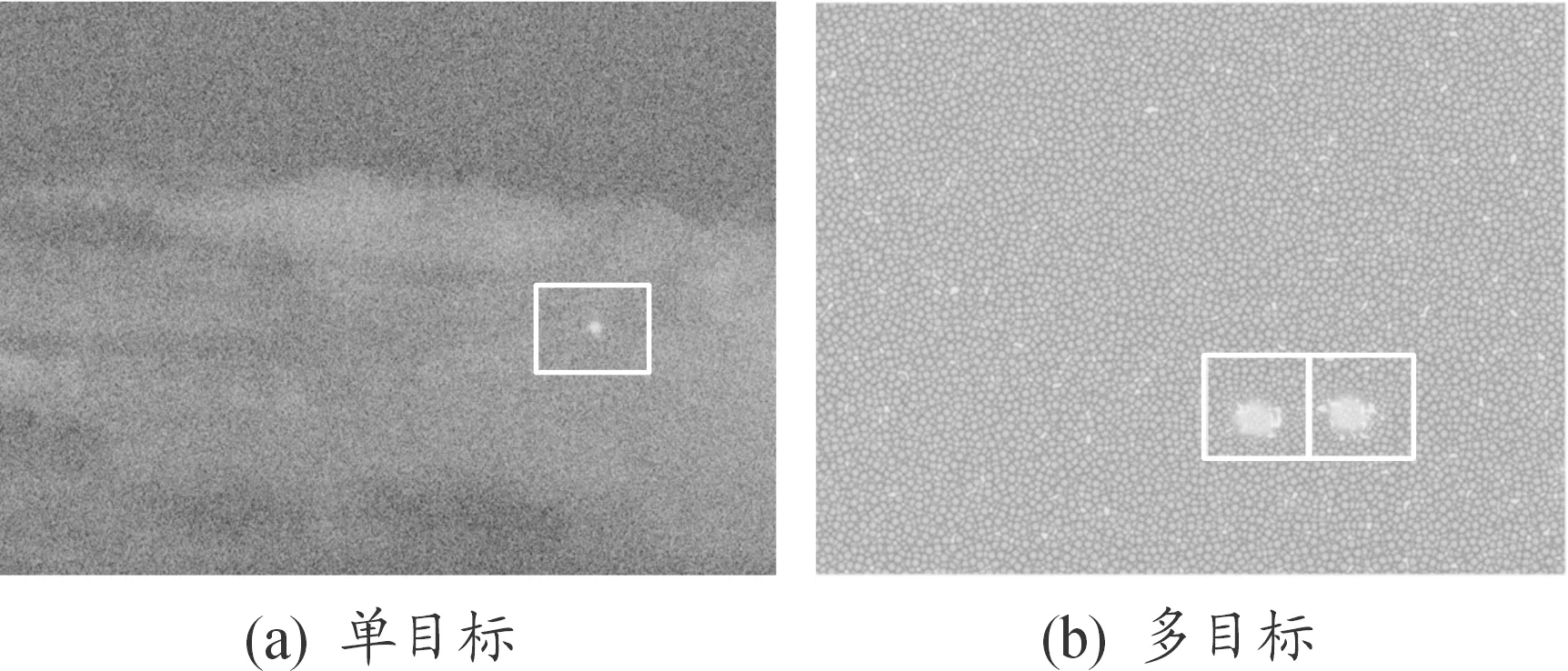
图8 噪声干扰下本文方法鲁棒性测试效果图
如图8所示,噪声干扰下,本文方法仍旧准确提取外弹道目标,获取有效目标图像,鲁棒性满足使用需求。
将进动角设成20°,信噪比设成10 dB,在俯仰角依次是35°、65°、125°条件中,在所提取外弹道目标成像序列里获取散射点坐标集合,估计外弹道单目标的微动特征和结构特征,结果如图9所示。
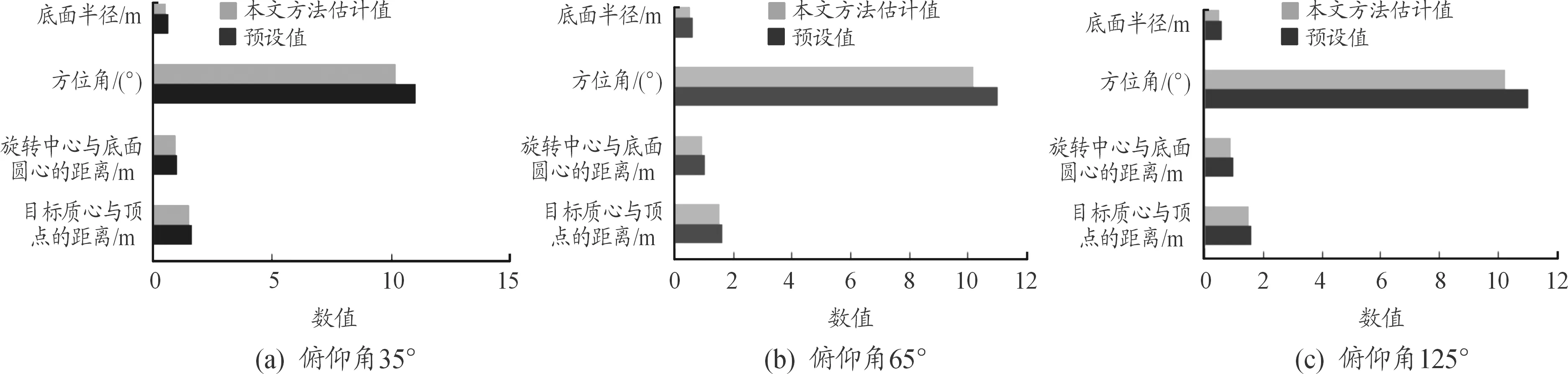
图9 外弹道单目标的微动特征和结构特征直方图
表1是本文方法对外弹道单目标的微动特征和结构特征估计差值。
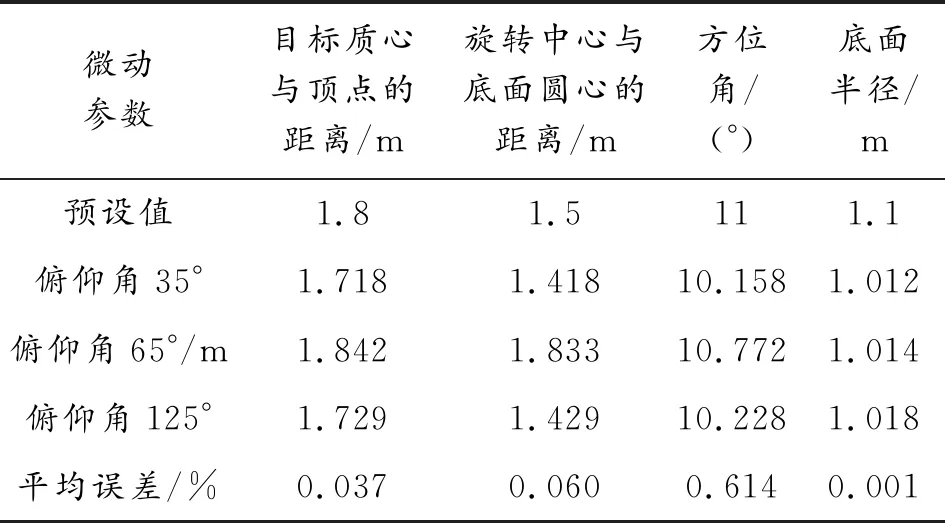
表1 本文方法估计差值
如图9、表1所示,本文方法在估计外弹道单目标微动参数时,当成像系统和外弹道目标锥旋轴的俯仰角依次是35°、65°、125°时,锥旋旋转中心底面圆半径、外弹道目标方位角、旋转中心和底面圆心距离、目标质心与顶点的距离四种特征参数估计结果和预设值差异较小,平均误差在0.614%以内,验证本文方法可准确估计外弹道单目标微动参数。本文方法对外弹道多目标微动参数的估计结果如表2所示。
如表2所示,本文方法对外弹道多目标的微动特征和结构特征估计结果,因不能完全排除噪声干扰,导致和预设值存在一定误差,平均误差在0.36%以内,和预设值也十分接近,差值极小。

表2 本文方法对外弹道多目标微动参数的估计结果
对比结果可知,对单目标的微动特征估计结果和预设值的平均误差比对多目标的微动特征估计结果和预设值的平均误差要高出一些,主要是由于外弹道目标方位角的估计值误差较高,这是因在对单目标进行跟踪时,在方位角上转动角度较小,所以易产生些许误差,但此误差依旧在精度允许范围内,还是比较精准的。
综上,本文方法可准确估计外弹道单目标、多目标的微动参数。如果对转角进一步反馈式精准控制,结果误差还将进一步减小。
4 结论
本文提出了基于红外触发技术的外弹道目标微动参数估计方法,并将该方法在仿真实验中进行性能测试,测试结果显示:
1) 本文方法可使用红外触发式数码成像系统准确获取外弹道单目标、多目标图像,且拍照结果中会对目标进行标注;
2) 噪声干扰下,本文方法仍旧准确提取外弹道目标,获取有效目标图像;
3) 在俯仰角依次是35°、65°、125°条件中,本文方法在估计外弹道单目标、多目标微动参数时,锥旋旋转中心底面圆半径、外弹道目标方位角、旋转中心和底面圆心距离、目标质心与顶点的距离四种特征参数估计结果和预设值差异较小,估计结果有效。
猜你喜欢
失效分析与预防(2022年3期)2022-11-18
小哥白尼(趣味科学)(2022年3期)2022-06-09
消费电子(2021年7期)2021-08-10
宇航计测技术(2021年6期)2021-04-19
兵器知识(2020年8期)2020-08-12
计算机应用文摘·触控(2019年9期)2019-07-07
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
时代金融(2017年6期)2017-03-25
中学科技(2009年4期)2009-05-26