管廊巡检机器人技术分析
2021-08-14 03:41张世宇眭小红周起如
信息记录材料 2021年7期
张世宇,眭小红,赵 瑜,周起如
(深圳市赛为智能股份有限公司 广东 深圳 518057)
1 引言
当前城市综合管廊建设已经成为世界范围内的发展趋势,2017年5月住建部、发改委联合发布《全国城市市政基础设施建设“十三五”规划》,截至2017年4月底国内地下综合管廊试点项目已开工建设687 km,建成廊体260 km,完成投资400多亿元。未来10年地下综合管廊需求超3万公里,投资规模将达1.8万亿[1]。在此背景下,综合管廊巡检机器人行业迎来发展契机。
国内巡检机器人的研究已有20多年的历史,由于国内研究起步较晚,在技术水平、实用化程度以及稳定方面,相比美国、日本等国家有较大的差距[2]。国内巡检机器人按功能可分为安保机器人、消防机器人和巡逻机器人等,其功能往往雷同,名称外观稍有差别,普遍应用在变电站、管廊、机房、园区、化工等环境中。
2 管廊巡检机器人功能及价值
管廊巡检机器人是指由移动载体、通信设备和检测设备等组成,采用遥控、半自主或全自主运行模式,用于综合管廊巡检作业的移动装置[3]。
根据《综合管廊智能化巡检机器人通用技术标准》征求意见稿[3],巡检机器人按行走机构型式可分为:有轨式和无轨式(轮式、履带式);巡检机器人按控制方式可分为:自主控制、半自主控制、人工遥控。由下表可知,管廊机器人巡检多采用轨道式,适合全自主巡检及半自主巡检。性能对比分析如下:

表1 巡检机器人优势对比[4]
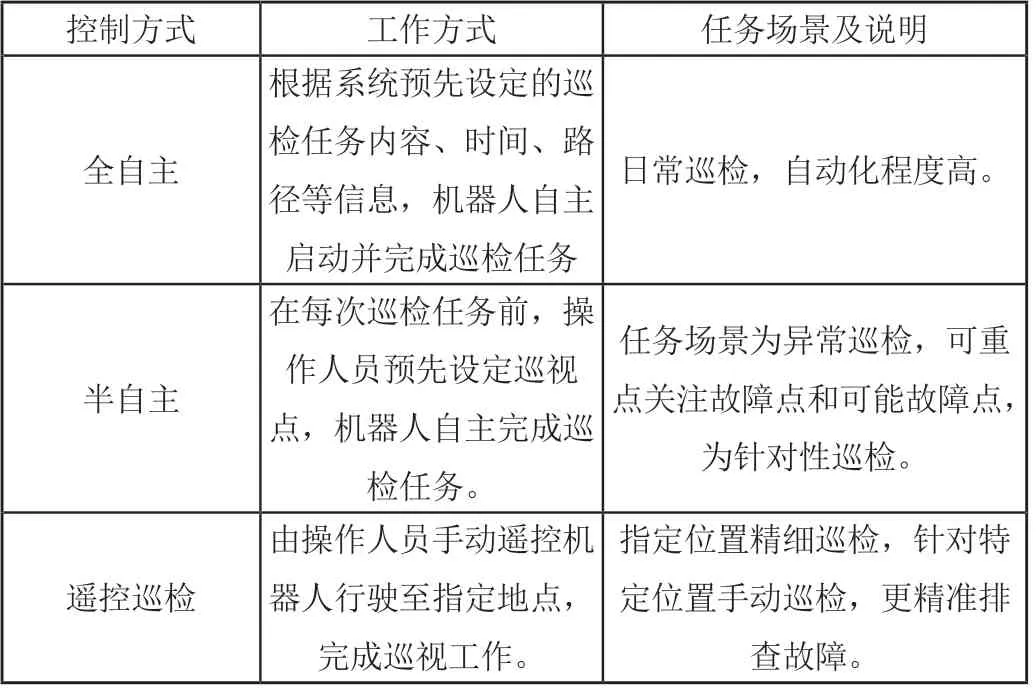
表2 巡检控制方式对比[5]
1.1 价值
管廊巡检机器人可降低人工巡检工作中的危险性,也会弥补巡检人员负担过重的缺点。相比于传统人工巡检方式,采用综合管廊机器人具有以下优势:
(1)安全性:管廊巡检往往处于昏暗、潮湿、幽闭且狭长的空间环境,巡检过程中容易遇到有毒有害气体、泄露的燃气和强电等危险,同时不可避免会对巡检人员的心理构成一定负面影响。采用巡检机器人降低了巡检人员造成伤害的可能。在遇到突发情况时候,机器人还可以代替人工进行事故探查、现场通信、灭火等工作。
(2)实时性:地下管廊短则几公里、长则数十公里,其内部空间结构复杂,具有设备多、定位难的特点。出现故障需要快速准确定位。人工巡检获取的信息容易出现不全面、不规范、滞后等问题。采用巡检机器人可以规范、实时、全天候、系统地获取巡检数据。
(3)分析预测性:管廊巡检机器人可以获取大量结构化的运维数据,基于数据,结合管廊运行特点及相关经验数据,可以建立运维分析模型进行分析和预测。主要针对电力、热力、燃气等进行高温和高限报警等。
(4)经济性:由于管廊人工巡检工作环境恶劣且具有一定危险性,其成本有逐年增加的趋势。管廊巡检机器人购置成本较高,但具有运维成本低,费用稳定,可24小时实时分析等优势,相信未来的经济优势会越发明显。
1.2 功能
经过总结分析,常见功能如下[3-6]:
(1)环境检测功能:基于各类环境传感器,对于廊体内温湿度、有害气体含量、空气含氧量、烟雾浓度、光照度、井盖等状态进行检测。
(2)图像采集功能:基于可见光视频和热成像技术,进行视频巡检和红外测温等检测。
(3)仪表识别功能:基于计算机图像视觉分析技术,将场景中背景和目标(指针或读数)分离,通过对目标的分析,识别出仪表读数。
(4)智能防撞与自主避障功能:采用红外避障传感器,遇到障碍自动停止并报警,防止碰撞造成人员和设备的损害。
(5)自动报警功能:检测到环境或机器人自身异常时,可在现场或传输到控制端进行报警。
(6)交互式对讲指挥功能:通过搭载拾音器及高清摄像机,实现现场与平台间音视频交互,可作为应急通讯功能。
(7)管线检测功能:可针对气体绝缘金属封闭输电线路(GIL)局放检测,去除安全隐患。
(8)自动生成巡检报表功能。
2 性能需求
综合管廊内部环境复杂而恶劣,给水、排水、热力、燃气、电力、电信等管道排布其中,空间狭窄、昏暗、潮湿,甚至会出现有毒害气体泄漏的环境[4]。因此管廊巡检机器人必须具有相应的功能,才能顺利完成巡检工作,性能需求及常用控制指标如下[3-6]:
(1)移动灵活能力:在管廊复杂的环境中,巡检机器人需要具备灵活移动的能力(有轨式巡检机器人最小转弯半径应不大于自身长度的2倍;无轨式巡检机器人应具有原地自转能力且最小转弯半径应不大于自身长度的1倍)。
(2)全面监测能力:机器人必须实时监测管内各类管道及环境参数、机器人的自身状态信息等。
(3)实时信息传递:机器人能够将监测数据及时传输回操作中心,延时≤100ms。
(4)远程操作能力:工作人员可以远程、实时控制巡检机器人完成巡检任务。
(5)准确定位系统:巡检过程中,机器人的定位精度应小于±100 mm,重复定位误差应不大于50 mm,且在行进出现偏差时应能自主纠正;沿固定轨道巡检,精准到达预置位置,误差≤1 cm)。
(6)持续工作(续航)能力:管廊长度一般在几公里到数十公里不等,巡检机器人的巡航时间应不小于4 h,巡检机器人充满电时间应不大于2 h,实时监测本身电量,能自主返回充电仓进行自主充电。
(7)安全运行能力:防撞及避障功能、交互式对讲指挥功能(视频、音视频信息交互)等。
3 管廊巡检机器人控制系统关键技术讨论
管廊巡检机器人涉及的关键技术包括传感器技术、无线通信技术、机器人定位技术等[4]。
3.1传感器技术
传感器用于感知管廊内部环境与机器人自身的状态,包括:气体传感器、视觉传感器、距离传感器、惯性传感器等。
3.2 无线通信技术
管廊巡检机器人在地下综合管廊执行日常任务,需要传输的信息大,实时性高。ZigBee与蓝牙的无线通信方式传输距离短、传输速率低,故不适合管廊。管廊处于地下,外界的4G信号难以覆盖,如果在管廊内部架设基站,需要覆盖整个廊体,建设和运营费都很高,故不适用。WLAN无线局域网具有实施简单、后期的扩展灵活、维护成本低等特点,并可满足通信要求,故被广泛采用。
3.3 机器人定位技术
目前市场上大多数的综合管廊巡检机器人采用的是轨道巡检,通常利于惯性传感器,并增设路标检测系统,消除累积误差。路标通常包括磁力路标、RFID路标,视觉路标、自然路标等。
4 展望
国内巡检机器人研究起步较晚,与发达国家有一定的差距,当前有较为广阔的市场需求和较为完善的通用技术标准,目前处于行业爆发期。
智慧管廊是未来的重要发展方向,管廊巡检机器人应与管廊运维管理系统深度融合,实现管廊的数据共享、环境与设备监控、城市管线监控、管廊安全监控、无线巡检、深度协同、辅助决策、应急指挥等智慧化建设运维管理,提升综合管廊管理效率、管理质量和综合服务能力,更好地融入智慧城市管理和服务体系。
猜你喜欢
石家庄铁路职业技术学院学报(2021年1期)2021-06-09
读写月报(初中版)(2021年12期)2021-05-25
安全(2020年2期)2020-04-16
中国交通信息化(2019年5期)2019-08-30
中学生数理化·七年级数学人教版(2019年4期)2019-05-20
能源(2018年8期)2018-09-21
江西建材(2018年2期)2018-04-14
能源(2017年11期)2017-12-13
数学小灵通·3-4年级(2017年9期)2017-10-13
中国卫生(2016年11期)2016-11-12