
仿手形机械手的设计仿真及实物验证
2021-08-20 14:23张艳华李嘉鹏
机电工程技术 2021年11期
张艳华 李嘉鹏

摘要:仿生机械手是现代工程作业的重要工具,在装备制造、石油勘探、高空架设等诸多行业可代替人类完成重要的工作。在对人类手掌进行数据采集的基础上,以手骨为连杆,以筋为驱动,设计了一款仿人手形状机械手。利用 SolidWorks完成建模组装,并使用运动算例进行仿手形机械手的运动仿真,再利用 SolidWorks里 Simulation插件对食指进行有限元分析,从而得到最优的设计方案。最后结合3D打印技术将设计数据转化为实际可行的 ABS材料仿手形机械手模型。该机械手由连杆机构组成,具有和人手相似的外形和尺寸,通过5个二次原动机(舵机)带动各手指机构完成手指的屈伸运动,可实现“爱你”“OK”等手势动作。结果表明,机械手设计合理,能运动灵活且可完成各种动作,满足设计要求,食指最大可钩住约20 N的重物。
关键词:机械手;仿手形;SolidWorks;运动仿真;有限元分析;3D打印
中图分类号:TP241文献标志码:A文章编号:1009-9492(2021)11-0175-04
Design Simulation and Physical Verification of Manipulator with Imitative Hand
Zhang Yanhua,Li Jiapeng
(Department of Electromechanical Engineering, Guangdong University of Science & Technology, Dongguan, Guangdong 523083, China)
Abstract: Bionic manipulator is an important tool in modern engineering work, which can replace human beings in many industries such as equipment manufacturing, oil exploration and high altitude erection. Based on the data collection of human hand, a manipulator with the shape of human hand was designed, which was driven by the hand bone and the rib. The model was assembled by SolidWorks, and the simulation of the manipulator was carried out by using the motion calculation example. Then, the simulation plug-in in SolidWorks was used to analyze the forefinger by finite element method, so that the optimal design scheme can be obtained. Finally, the design data was transformed into a practical and feasible model of ABS manipulator based on 3D printing technology. The manipulator is composed of connecting rod mechanism, which has the similar shape and size as the hand. It can achieve the gesture action of "love you" and "OK" by driving each finger mechanism to complete the finger flexion and extension movement through five secondary prime motors (steering gear). The results show that the manipulator is reasonable in design, flexible in motion and can complete various actions, and meets the design requirements. The index finger can hook up to about 20N heavy objects.
Key words: manipulator; imitating hand shape; SolidWorks; motion simulation; finite element analysis;3D printing
0 引言
機器人技术是当今世界上最热点的技术[1],随着工业生产的进步,机器人已被广泛用来代替人类完成一些简单和重复性的工作。机械手自20世纪60年代初问世以来,经过60多年的发展,目前已成为机械制造业自动化生产中重要的机电设备。由于仿生机械手具备像人手一样的5个手指和手掌,具有更强的灵活性和功能性,因而其可以代替人手在很多场合完成各类复杂和灵巧的操作,例如医疗手术、设备安装与维修、家务劳动等[2]。仿生机械手已成为现代工程作业的重要工具,所以研究仿生机械手臂具有重要的意义[3]。
目前仿生机械手的研究已有很多进展,英国南安普敦大学的 C M Light 等[4]研制出轻型自适应多轴机械手,能够用最小的力对物体保持稳定的抓取。西安工程大学李振浩等[5]研制出一款结构简单、易于控制和抓取的自适应欠驱动仿生机械手。南京大学的戚杭州[6]对于以人手姿态控制仿生机械手运动进行了研究,实现了交互地用手实时控制真实的仿人机械手。
基于此,本文对于仿手形机械手的机械结构进行了研究,首先确立了机械手的外形,然后进行运动方案的设计,确定采用连杆机构,由舵机带动完成手指的各种动作,结构简单,易于控制。使用 SolidWorks 完成零件的建模和组装,并进行了运动仿真和静应力分析,最后采用3D 打印方式制作出实物对设计进行了验证。
1 机构设计
1.1 外形确立
仿手形机械手的外形,可通过对人类手部的轮廓、外形及骨骼分布进行各种数据的采集[7],继而利用SolidWorks 软件对仿手形机械手进行三维建模。
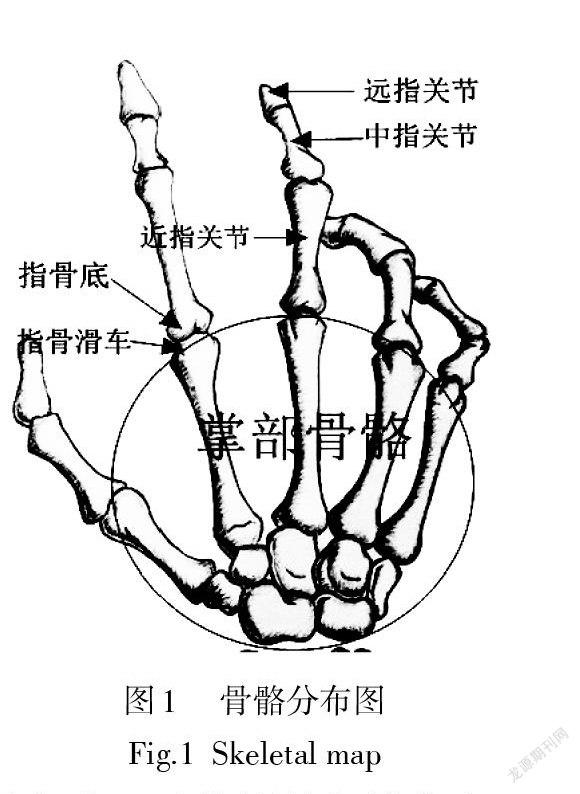
首先,得了解人类的手,了解了之后才能预先设定好目标。人手骨骼分布如图1所示。手之所以能运动,其动力源是手部肌肉的收缩,通过拉扯手部骨骼作出相应的动作。手骨包括掌骨、指骨和腕骨。而手势动作主要由指骨完成,正常情况指骨共有14块,拇指占2节,其余4指各占3节,由指尖向掌心依次为远节指骨、中节指骨、近节指骨,除了远节指骨没有指骨滑车外,中节指骨和近节指骨都有指骨滑车和指骨底,每节指骨件由指骨底和质指骨滑车两两相接,相当于机械结构中的铰链结构,用于做旋转运动,为手指运动提供自由度[8]。
充分了解认识了手部结构之后,便可以建立仿手形机械手设计的原始参考尺寸体系。首先,确定每根手指的每节指骨长度及手掌的大概外形尺寸[9],如图2所示。其次,确定每根手指的最大弯曲角度,最后就是各个铰链副的旋转中心位置。
1.2 机械手运动方案设计
机械手运动方案设计的好坏,对机械手能否完成预期的动作、完成动作的质量及机械手在制作出实物后的可行性等,都起着决定性的作用。
1.2.1 运动机构形式及原理
由于手指的运动是通过指骨滑车和指骨底形成的铰链进行指关节的摆动,而拉动指关节的筋骨是移动的。为了得到传动稳定、结构简单、动作灵敏且制造容易的机械手,在对机械手机构选用时,使用范围广、可调性较好、结构简单、制造简单、维护简单的连杆机构;在连杆机构中能实现往返移动和往返摆动的则有曲柄摇杆机构[10]。
1.2.2 运动规律
(1) 手指关节机构运动
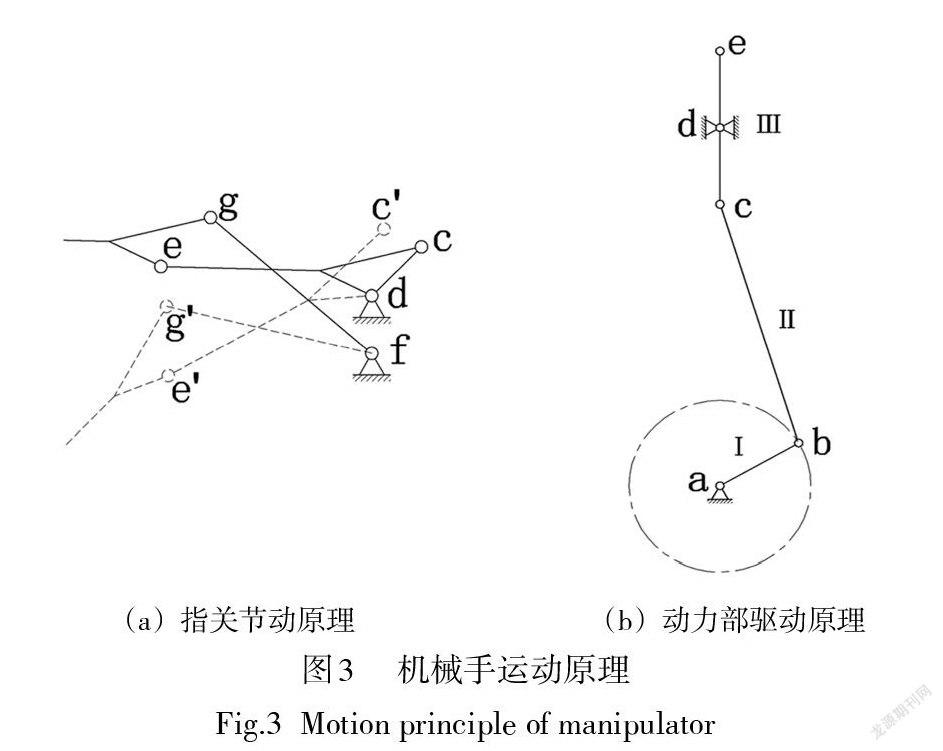
将机械手拆分为指关节部和动力部,动力部由动力源和曲柄完成,指关节部由摇杆及其他连杆完成。动力部中的动力源选用较为经济又合乎需求的舵机,不仅扭矩适中,而且还能定点保持机械手在某个角度的弯曲动作[11]。先将舵机的转动动力传送给机构中曲柄,再由曲柄带动摇杆,使摇杆输出摆动动力,作往返摆动动作,以此完成机械手动作需求。其原理如图3所示。图中,其总成结构由 ab杆作为曲柄转动带动bc杆推动cde杆,使cde杆可做往复摆动运动;而cde桿与eg杆错位连接,eg杆跟随摆动并且可形成差速,由此模拟出手指弯曲的运动状态。其余指关节弯曲原理相同。
(2) 建立指关节结构简图
在大量参考数据和理论的支持下,对仿手形机械手的设计有了初步的设计思路及整体架构,建立仿手形机械手各手指指关节简图。食指指关节结构如图4所示。
1.2.3 建模与组装
根据设计出来机械简图所提供的指关节尺寸通过 SolidWorks三维建模,得到指关节模型,如图5(a)所示。依次对其他手指指关节进行结构设计并三维建模,并完成组装。最终完成的机械手三维模型如图5(b)所示。
2 运动仿真
整体的机械结构三维模型已经建模完成,但理论设计在实际生产制作中未必能到理想的结果,本部分通过使用SolidWords软件中的运动算例对机械手进行运动模拟,以确保机械手设计的结构可行性和动作合理性。
通过对各手指添加不同角度的马达,机械手可以完成不同的手势动作,其中“爱你”和“OK”手势效果如图6所示。
3 有限元分析
主要对机械手的食指进行静应力分析,采用的是 SolidWorks Simulation模块。
3.1 材料设置
由于制作本机械手选用的技术为3D 打印技术。3D 打印是根据其成型原理有着不同从成型材料,所用3D打印机的成型原理为 FDM (Fused Deposition Modeling)成型技术,此成型技术常用的材料有 ABS 、PC 类材料、 PLA 、尼龙等。目前,产量较大、应用较广泛的塑料是 ABS 树脂,且 ABS 材料具备超强的易加工性,外观特性,在价格上占很大优势,产量大,购买方便。出于成本考虑,优先使用 ABS耗材。
3.2 边界条件
根据机械手食指的实际使用情况,对食指与手掌连接面施加固定几何体约束,对旋转处施加固定铰链约束。对食指指尖上表面施加垂直向下的力,力的大小分别设置了100 N 、50 N和10 N三种情况。
3.3 网格划分
鉴于食指结构的复杂性,采用网格智能划分方法进行网格划分。采用【生成网格】,基于曲率的网格,最大单元大小和最小单元大小为采用默认数值,采用高品质单元,雅可比点4点。
3.4 静应力分析
完成上述设置后,便启动有限元分析。经分析计算得到的应力云图如图7所示。图为对指尖施加10 N作用力的情况,可以看出得到的最大应力20.601 MPa ,没有超出 ABS材料的屈服强度50 MPa 。但当对指尖施加100 N 和50 N时,最大应力分别185.66 MPa 、90.06 MPa ,远远大于 ABS的屈服强度。
以上说明使用 ABS 材料制作仿手形机械手时不应对其施加太大的外部载荷,否则会造成零件断裂,导致损坏,而此模型仅用于实践操作及效果展示,要想使模型更加实用,应选用其他刚性材料且选用其他工艺制作。
4 实物验证
通过SolidWorks软件将机械手的每个关节、连接杆及手掌分别另存为STL格式文件,再加载进3D打印机的切片软件中进行切片。打印耗材使用ABS丝材,设置好打印机的参数,进行零件打印制作和组装。结果如图8所示。
5 結束语
本文主要研究了仿人手机械手的机械结构设计,制作和运动仿真,详细内容如下。
(1) 通过研究和分析人手的骨骼分布和生理结构特征,对机械手进行数据采集和运动方案设计,使用 Solid- Works进行三维建模以及运动仿真和有限元分析,完成了仿手形机械手的设计。仿真结果显示,机械手可以完成各种动作,ABS材料制作的食指可承受约20 N的重物。
(2) 通过3D打印技术打印出大部分部件,制作出仿人手机械手实物,经过实物验证,机械手可以完成设计的手势动作。
参考文献:
[1]张子超,王博文,靳少卫.用于机械手稳定抓取的磁致伸缩触觉传感器设计与研究[J].机电工程,2020,37(2):216-220.
[2]涂琴,岳东海,王延杰,等.仿人手精巧抓取柔性末端结构设计与变形特性研究[J].机床与液压,2020,48(15):38-43.
[3]刘帅,孟岩.仿生机械手的设计与仿真分析[J].现代制造技术与装备,2019(12):70-72.
[4] Light C M,Chappell P H.Development of a lightweight and Adapt- ableMultiple-axisHandProsthesis[J].MedicalEngineering & Physics,2000(22):679-684.
[5]李振浩, 管声启, 肖旭,等.一种新型的仿生机械手结构设计与运动学仿真[J].西安工程大学学报,2020,34(5):56-62.
[6]戚杭州.仿人机械手设计与手姿态估计研究[D].南京:南京大学,2019.
[7]张海容.基于低熔点合金的变刚度软体仿人手指研制[D].哈尔滨:哈尔滨工业大学,2018.
[8]米健.人体结构学[M].上海:第二军医大学出版社,2010.
[9]李嘉鹏.仿手形机械手的设计[D].东莞:广东科技学院,2019.[10]濮良贵,张春林.机械原理[M].北京:高等教育出版社,2013.
[11]潘炳成, 张禹,于浩然.一种四自由度水下机械手设计与运动学分析[J].现代机械,2021(2):5-9.
第一作者简介:张艳华(1978-),女,硕士,副教授,研究领域为机械制造及其自动化,已发表论文26篇。
(编辑:刁少华)
猜你喜欢
机电工程技术(2021年3期)2021-09-10
环球时报(2019-07-18)2019-07-18
儿童故事画报(2019年5期)2019-05-26
现代职业教育·中职中专(2018年7期)2018-05-14
读者·校园版(2016年20期)2016-11-18
小学阅读指南·低年级版(2015年12期)2015-12-11
环球时报(2014-01-06)2014-01-06
中小企业管理与科技·下旬刊(2009年8期)2009-12-31
